基于舰船运动预测的无人机着舰航向指令修正方法
2018-09-10 18:25:44华艺欣肖奔
航空科学技术 2018年11期
华艺欣 肖奔


摘要:本文提出一种基于舰船运动预测的无人机航向指令修正方法,以实时估算舰船所遭遇海浪的幅值与频率,在线预计舰船运动为基础,预测着舰时的舰船状态信息,并利用这些信息生成无人机的航向与航迹角修正指令,以使着舰时无人机与理想着舰点之间的偏差最小。最后利用该方法给出了典型舰船动态特性的高精度仿真结果。
关键词:自主着舰系统,舰船运动预测;实时估算;指令修正;理想触舰点
中图分类号:V429 文献标识码:A
在自主着舰的过程中,由于理想着舰点、进舰速度、航向和俯仰姿态等有严格限制,舰载无人机自主着舰具有极大的难度。若要在阵风扰动、通信丢失、高海况、舰船运动等情况下实现准确着舰,则面临更大的挑战[1]。为了解决这些问题,本文提出了一种基于舰船运动预测的无人机航向指令修正方法,包括舰船运动实时预测和决定无人机着舰最优轨迹的算法,主要目标是利用着舰前los预测的舰船状态,来修正无人机着舰阶段航向与航迹角等。
假定满足如下要求[2]:(1)算法对中等以下海况有效;(2)舰船转弯运动速率不大于0.5(°)/s;(3)飞控系统具有抗风扰着舰能力,舰船甲板风影响可以忽略;(4)算法需要利用船体轴系下含有当前舰船姿态、速率和加速度信号,在距舰船18km范围内可以获取这些信号,并按20Hz频率接收;(5)在这些信号瞬时丢失时,舰船运动预测模型是稳定的。
1 舰船运动实时预测
1.1 频率估算
要得到准确的舰船运动预计模型,就必须准确估算海浪频率。由于从开始进场到着舰有相对较长的时间段,所以可以采用傅里叶变换估算波浪频率。傅里叶变换(FFT)广泛用于有噪信号的多频率估算。图1给出了从有噪信号(如图1(a)所示)中获取的波浪频率(如图1(b)所示),频率估算误差如图1(c)所示。由图1可知,FFT可得到精确的频率估算。
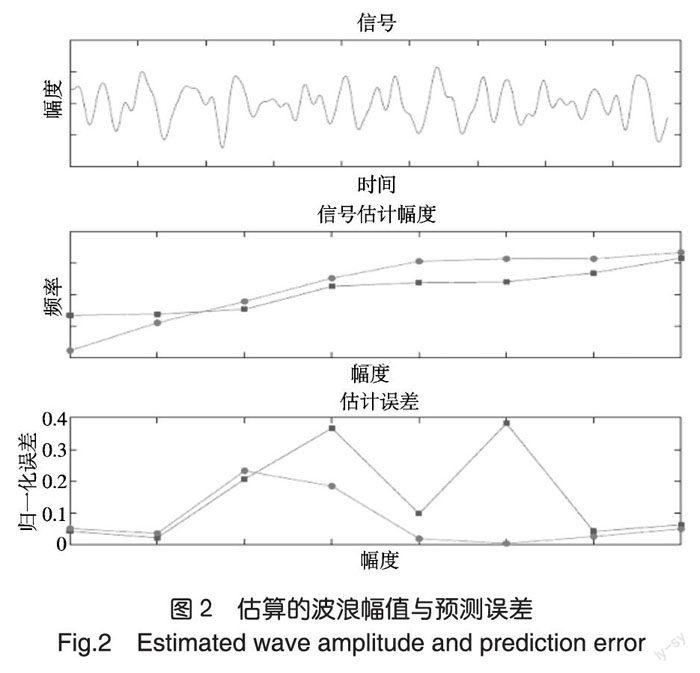
1.2 幅值估算
一旦频率已知,波浪模型的幅值等参数变为线性,许多参数估算技术可以用来估算幅值。这里选择最小二乘算法,因为其精度高,运算简便。估算结果如图2所示。
2 相对船体轨迹的优化算法
这种优化算法的主要目标是利用舰船运动模型来预测并修正着舰参数从而得到甲板運动。在此基础上还可以修正对准跑道的中心线、下滑道、俯仰角等来获得着舰点在漂移限制范围内的精确着陆。最终目标是获取舰载机进舰着舰的最优轨迹。
设计算法时假定以下条件成立:
(1)在进舰过程的最后20s内,舰船运动尽可能稳定;
(2)对于相同的舰船运动和引言规定的海况,算法有效;
(3)若着舰之前的 5s内舰船数据链中断后,飞机继续进舰和逃逸时,算法有效。
甲板运动时的下滑道与对中修正示意图如图3所示。逃逸时,指令发生器产生期望的速度(全加力)和对中,以便安全复飞。
3 无人机理想运动模型
与陆基飞机着陆不同,舰载机着舰下滑不经过平飘,而是沿一特定轨道进行带动力匀速直线下滑[3,4]。假定无人机以相对舰船的恒定速度v*进舰,则无人机相对斜角甲板坐标系的理想位置定义如下:式中:xca为舰船位置,d为无人机与舰船之间的初始距离。
由式(1)~式(3)可以得到无人机的理想速度:
同样,由式(4)~式(6)可以得到无人机的理想加速度:
4 用于舰船运动补偿的角度修正
下面分析用于舰船运动补偿的无人机控制系统[5]。
由于舰船升沉、纵摇和横摇运动,着舰点的实际位置Xca,yca和zca不同于理想位置。补偿这一误差可以分为两部分:飞行航迹角修正和无人机最终着陆阶段的航向修正。在着舰前10s执行修正。z轴方程形式如下:式中:tF为理想着舰时刻。
着舰时的理想z值为:
将舰船升沉、横摇和纵摇运动导致着舰点z向坐标的复合扰动标注为△ZN。航迹角补偿中各变量关系如图4所示。
图4中,dN=10v*,据此则有:
式(7)~式(10)忽略了实际着舰与理想着舰之间的时差影响。假如时差大,可用迭代方法计算着舰时刻tF的实际着舰点。
5 仿真结果
仿真由高逼真度的舰船动力学模型和8个不同频率正弦函数叠加的海浪动力学模型组成。海浪运动影响舰船的纵摇、升沉和横摇运动及其速率,滚转、俯仰和偏航及其速率。由图5可知,根据舰船运动预测能准确估算所有变量(实线为实际变量,虚线为预测变量)。为验证预测能力,将着舰前的最后10s曲线放大,如图6所示(实线为实际变量,虚线为预测变量)。可以看到10s内的所有变化均可准确预测出来,并且确保误差均在要求范围内。着舰时的预测误差及误差要求见表1,由表可知预测误差满足要求。
6 结束语
为了让舰载无人机在各种不利条件下实现准确着舰,本文提出了基于舰船运动预测的无人机航向指令修正方法,包括舰船运动实时预测和决定无人机着舰最优轨迹的算法,主要目标是利用着舰前los预计的舰船状态来修正无人机着舰阶段航向与航迹角等。仿真结果表明,舰船运动实时预测可以准确估算所有变量,从而对着舰引导系统的设计及工程实现有实际的应用参考价值。
参考文献
[1]杨一栋,余俊雅.舰载机着舰引导与控制[M].北京:国防工业出版社,2007.
[2]张明廉,徐军.舰载飞机自动着舰系统的研究[J].北京航空航天大学学报,1994,20(4):386-391.
[3]周自全,张子彦.飞行品质和飞行安全[J].飞行力学2009,27(2):1-6.
[4]罗先震,金长江.舰载飞机着舰下滑轨迹控制与分析[J].飞行力学,1993(3):34-44.
[5]Jovan B,Joshua R.An autonomous carrier landing system forunmannned aerial vehicles[C]//AIAA Guidance,Navigation,and Control Conference,2009.