
分布式驱动智能汽车转向稳定性控制策略研究
2018-09-10 08:20王东涛李治国刘助春姚小勇
河南科技 2018年31期
王东涛 李治国 刘助春 姚小勇


摘 要:当前对分布式驱动智能汽车转向稳定性的研究多基于车辆动力学模型,而针对驱动电机对汽车转向造成的影响的研究较少,忽略电机的影响容易使汽车出现侧滑、过度转向或不足转向等问题。基于此,本文分析了电机运行特性与车辆转向的关系,提出了分布式驱动智能汽车转向分类的思想,对转向稳定的情况实行转速控制策略,对转向不稳定的情况实行转速辅以转矩控制策略,并基于MATLAB/Simulink软件进行仿真分析。研究结果表明,转向分类控制在提高车辆操控性基础上实现了车辆的稳定转向,保证了车辆状态能紧随驾驶员的意图。
关键词:分布式驱动智能汽车;转向分类;转向稳定性;转速控制;转矩控制
中图分类号:U469.72文献标识码:A文章编号:1003-5168(2018)31-0105-04
Research on Steering Stability Control Strategy of Distributed
Drive Intelligent Vehicle
WANG Dongtao LI Zhiguo LIU Zhuchun YAO Xiaoyong
(Hunan Automotive Engineering Vocational College,Zhuzhou Hunan 412000)
Abstract: For the present study on steering stability of intelligent vehicle are more based on vehicle dynamics model, while ignoring the impact of the motor on the vehicle steering stability, that is easy to cause some instability problems such as sideslip、oversteering and understeering. Based on this, this paper analysed the relationship between motor operation characteristics and vehicle steering, put forward the idea of distributed driving intelligent vehicle steering classification, implemented speed control strategy for steering stability, and implemented speed control strategy with torque control strategy for steering instability, and carried out simulation analysis based on MATLAB/Simulink software. The results showed that the steering classification control achieved stable steering on the basis of improving vehicle maneuverability, and ensured that the vehicle state can follow the driver's intention.
Keywords: intelligent vehicle;steering classification;steering stability;speed control;torque control
近年来,智能汽车得到了迅猛发展。智能汽车主要基于纯电动汽车改装而来,其不仅在能源、环保和節能方面具有较大优越性,而且整车性能、转矩响应速度及加减速都比燃油车高出2个数量级[1]。目前,汽车操纵稳定性日益受到重视,是现代汽车的重要使用性能之一[2]。通过智能汽车驱动系统的电动化、线控化控制可以达到并超越燃油车的性能。近年来,国内外对分布式驱动智能汽车的研究取得了显著的成果[3,4]。
国内外对分布式驱动智能汽车转向控制的研究主要有以下几方面[5,6]:①基于Ackermann-Jeantand模型的转速控制,该模型极易计算得到各个车轮的转速,且在低速不打滑时具有良好的运用效果;②基于线性电流调节的电压闭环控制策略,此控制策略可使输入指令与速度和输出转矩呈线性关系;③基于操纵稳定性控制的转矩控制策略,通过直接横摆力矩控制(DYC)保证车身的稳定。
本文所研究的智能汽车是基于四轮独立驱动轮毂式纯电动汽车样车,并加装激光雷达、毫米波雷达及惯导等传感器,轮毂电机为永磁无刷直流电机,主要分析了汽车转向时永磁无刷直流电机对智能车车身稳定性的影响,采用转速与转矩协调控制策略,同时保证车辆行驶的操纵性与稳定性。
1 永磁无刷直流电机
永磁无刷直流电机的运行特性与一般直流电机相同。从永磁无刷直流电机的调速特性可知,改变电机的电源电压,电机输出转矩随电压瞬时改变,此时打破了输出转矩与负载的受力平衡,使电机变速,但电机的速度不可能顺变,即不可能瞬时达到期望值,转速的改变需要一个过程。对分布式驱动智能汽车而言,需要对此过程加以控制,否则会导致汽车失控。
2 转向运动学分析
2.1 转向模型
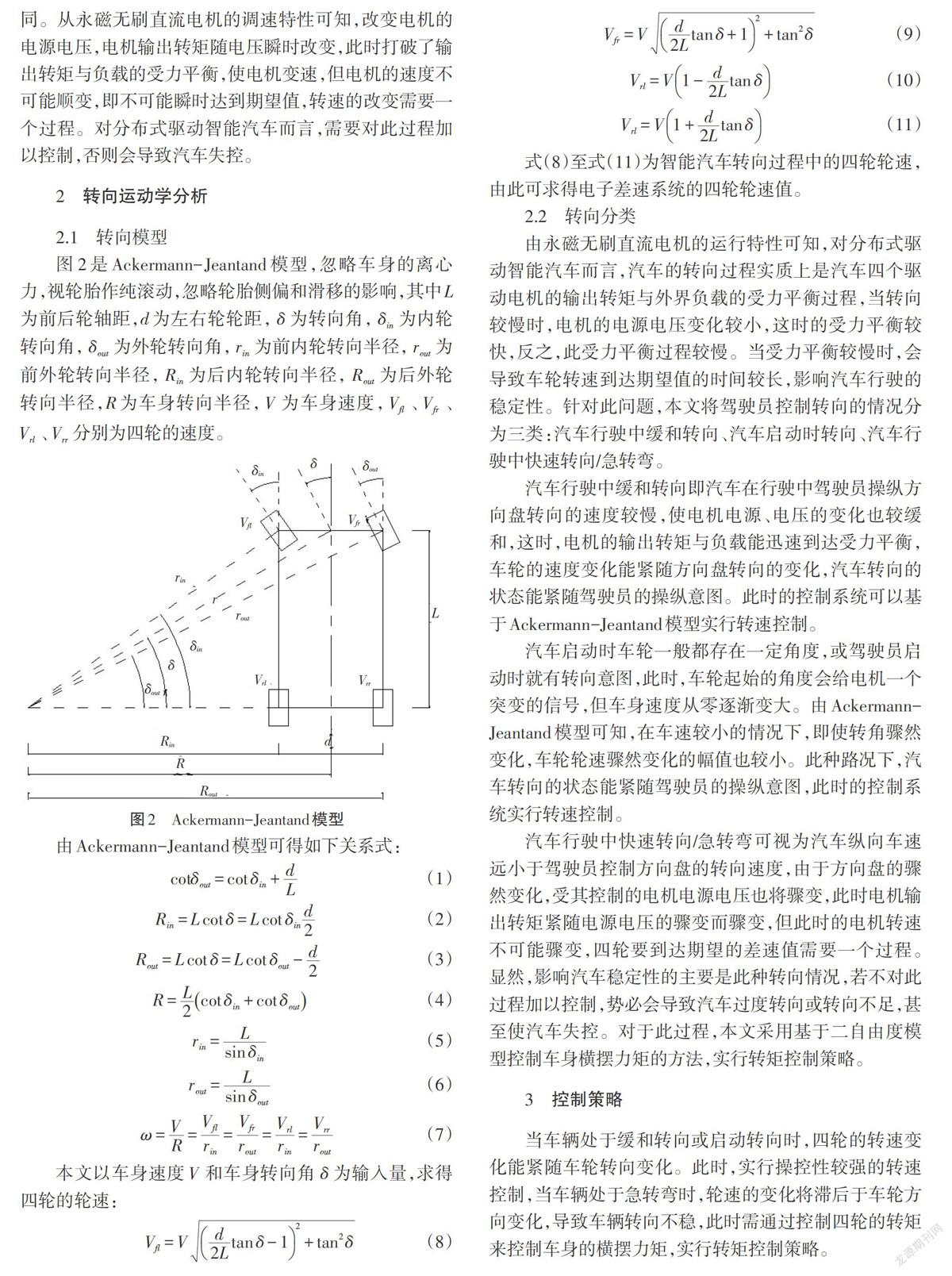
图2是Ackermann-Jeantand模型,忽略车身的离心力,视轮胎作纯滚动,忽略轮胎侧偏和滑移的影响,其中L为前后轮轴距,d为左右轮轮距,[δ]为转向角,[δin]为内轮转向角,[δout]为外轮转向角,[rin]为前内轮转向半径,[rout]为前外轮转向半径,[Rin]为后内轮转向半径,[Rout]为后外轮转向半径,R为车身转向半径,[V]为车身速度,[Vfl]、[Vfr]、[Vrl]、[Vrr]分别为四轮的速度。
由Ackermann-Jeantand模型可得如下关系式:
[cotδout=cotδin+dL] (1)
[Rin=Lcotδ=Lcotδind2] (2)
[Rout=Lcotδ=Lcotδout-d2] (3)
[R=L2cotδin+cotδout] (4)
[rin=Lsinδin] (5)
[rout=Lsinδout] (6)
[ω=VR=Vflrin=Vfrrout=Vrlrin=Vrrrout] (7)
本文以车身速度[V]和车身转向角[δ]为输入量,求得四轮的轮速:
[Vfl=Vd2Ltanδ-12+tan2δ] (8)
[Vfr=Vd2Ltanδ+12+tan2δ] (9)
[Vrl=V1-d2Ltanδ] (10)
[Vrl=V1+d2Ltanδ] (11)
式(8)至式(11)为智能汽车转向过程中的四轮轮速,由此可求得电子差速系统的四轮轮速值。
2.2 转向分类
由永磁无刷直流电机的运行特性可知,对分布式驱动智能汽车而言,汽车的转向过程实质上是汽车四个驱动电机的输出转矩与外界负载的受力平衡过程,当转向较慢时,电机的电源电压变化较小,这时的受力平衡较快,反之,此受力平衡过程较慢。当受力平衡较慢时,会导致车轮转速到达期望值的时间较长,影响汽车行驶的稳定性。针对此问题,本文将驾驶员控制转向的情况分为三类:汽车行驶中缓和转向、汽车启动时转向、汽车行驶中快速转向/急转弯。
汽车行驶中缓和转向即汽车在行驶中驾驶员操纵方向盘转向的速度较慢,使电机电源、电压的变化也较缓和,这时,电机的输出转矩与负载能迅速到达受力平衡,车轮的速度变化能紧随方向盘转向的变化,汽车转向的状态能紧随驾驶员的操纵意图。此时的控制系统可以基于Ackermann-Jeantand模型实行转速控制。
汽车启动时车轮一般都存在一定角度,或驾驶员启动时就有转向意图,此时,车轮起始的角度会给电机一个突变的信号,但车身速度从零逐渐变大。由Ackermann-Jeantand模型可知,在车速较小的情况下,即使转角骤然变化,车轮轮速骤然变化的幅值也较小。此种路况下,汽车转向的状态能紧随驾驶员的操纵意图,此时的控制系统实行转速控制。
汽车行驶中快速转向/急转弯可视为汽车纵向车速遠小于驾驶员控制方向盘的转向速度,由于方向盘的骤然变化,受其控制的电机电源电压也将骤变,此时电机输出转矩紧随电源电压的骤变而骤变,但此时的电机转速不可能骤变,四轮要到达期望的差速值需要一个过程。显然,影响汽车稳定性的主要是此种转向情况,若不对此过程加以控制,势必会导致汽车过度转向或转向不足,甚至使汽车失控。对于此过程,本文采用基于二自由度模型控制车身横摆力矩的方法,实行转矩控制策略。
3 控制策略
当车辆处于缓和转向或启动转向时,四轮的转速变化能紧随车轮转向变化。此时,实行操控性较强的转速控制,当车辆处于急转弯时,轮速的变化将滞后于车轮方向变化,导致车辆转向不稳,此时需通过控制四轮的转矩来控制车身的横摆力矩,实行转矩控制策略。
因此,建立以横摆角速度[γ]和质心侧偏角[β]为自由度的模型。车辆转向的二自由度期望值为:
[γd=ua1+Kdu21+τdsδf] (12)
[βd=0] (13)
式中,u為车速,a为车身质心到车轮前轴距离,[Kd]为稳定性系数,[τd]为时间常速,[s]为拉式算子,[δf]为前轮转向角。
建立期望模型的状态方程:
[Xd=AdXd+Edδf] (14)
式中,[Xd]、[Ad]和[Ed]分别为:
[Xd=βdγd] (15)
[Ad=0 00 -1τd] (16)
[Ed=0krdτd] (17)
其中:
[krd=ua1+Kdu2] (18)
对实际模型的控制,主要采用滑模变结构控制算法设计控制器,二自由度实际模型的状态方程为:
[X=AX+BM+Eδf] (19)
式中,[M]为车身横摆力矩,其他参数为:
[X=βγ] (20)
[A=a11 a12a21 a22] (21)
[B=b12b22] (22)
[E=b11b21] (23)
其中:
[a11=-Cf+Crmu] (24)
[a12=-1-aCf+bCrmu2] (25)
[a21=-aCf+bCrJZ] (26)
[a22=-a2Cf+b2CrJZu] (27)
[b11=-Cfmu] (28)
[b12=0] (29)
[b21=-aCfJZ] (30)
[b22=1JZ] (31)
建立差值状态方程:
[Xe=X-Xd=AX-AdXd+BMZ+H-Hdδf] (32)
式中:
[Xe=X-Xd] (33)
[D=A-AdXd+H-Hdδf] (34)
本文取切换函数为:
[sXe=cXe+Xe] (35)
式中,c为待定系数,其他参数为:
[Xe=β-βdγ-γd] (36)
[Xe=β-βdγ-γd] (37)
由于系统存在不确定性和外加干扰,因此,本文采用等效加切换的控制率:
[MZ=Meq+Mvss] (38)
趋近率选择:
[s=-ks-εsgns] (39)
由[sXe=0]、[ss<0]可得車辆转向所需的横摆力矩的值。
4 仿真分析
为了验证上述分析的准确性,本文利用MATLAB/Simulink对三类转向模型分别进行仿真。三类仿真的输入分别为:缓和转向车速20m/s,转向2s内逐渐转到45°再回转;启动转向车速3s内逐渐增大到20m/s,转向恒为45°;急转弯转速20m/s,转向第4s骤变为45°。图3、图4、图5为三类转向仿真结果。仿真参数:前后轮轴距2.2m,左右轮距1.5m,电机电源电压220V,电机转子转动惯量0.2kg·m2。
4 结论
仿真结果表明:在缓和转向、启动转向与急转弯转三种工况下,车轮转速的实际值能较好地跟随期望值,实现车辆的稳定转向。
参考文献:
[1]《中国公路学报》编辑部.中国汽车工程学术研究综述·2017[J].中国公路学报,2017(6):1-197.
[2]余志生.汽车理论[M].北京:机械工业出版社,2006.
[3]孙宜标,王哲,丁惜瀛.基于主从策略的双轮直驱电动汽车转向差速控制[J].大功率变流技术,2010(5):45-48.
[4] Massimo C,Lorenzo F,Antonella F. Vehicle Yaw Control via Second-Order Sliding-Mode Techniquel[J].IEEE Transaction on Industrial Electronics,2008(11):3908-3916.
[5] YANG Yee-Pien,LO Chun-Pin.Current Distribution Control of Dual Directly Driven Wheel Motors for Electric Vehicle[J].Control Engineering Practice,2008(16):1285-1292.
[6]余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报,2008(8):1115-1119.
