
高阶控制系统剪切频率求解方法研究
2018-09-10 05:43薛娓娓李娣娜马惠铖
河南科技 2018年31期
薛娓娓 李娣娜 马惠铖

摘 要:针对高阶控制系统剪切频率求解时所遇到的问题,本文提出三种简单实用且易掌握的解决方法,并通过实际例题对求解过程进行详细阐述和说明。文中提出的三种方法实用性强,有效提升了高阶控制系统中分析和校正效率,更好发挥了频域分析法在经典控制理论中的作用。
关键词:高阶控制;剪切频率;求解
中图分类号:TM935文献标识码:A文章编号:1003-5168(2018)31-0025-02
Research on the Method of Solving Shearded Frequency
of High Order Control System
XUE Weiwei LI Dina MA Huicheng
(Xi'an Innovation College of Yan'an University,Xi'an Shaanxi 710100)
Abstract: In view of the problems encountered in solving the shear frequency of high-order control systems, this paper proposed three simple, practical and easy to grasp solutions, and elaborated and explained the solution process through practical examples. The three methods proposed in this paper are practical, effectively improve the analysis and correction efficiency in high-order control systems, and better play the role of frequency domain analysis in classical control theory.
Keywords: high-order control;shear frequency;solve
頻域分析法在经典控制理论中有着举足轻重的作用,是系统分析和系统校正的主要方法,其中核心处理方法就是求解系统剪切频率,但剪切频率直接求解难度很大,且控制系统阶数一般都比较高,很容易出现错误,这给相关教学带来了很大困难。笔者结合多年教学经验,总结出下面三种求解系统剪切频率的方法,这三种方法简单实用,且容易掌握,达到了快速、准确求解高阶系统剪切频率的目的。
1 “近似取舍法”求解
利用数学知识,对式[x2+1]进行分析,若[x]取值比1小很多,则式[x2+1]的值可用1代替,即舍掉[x2],取1为结果;若x取值比1大很多,则式[x2+1]的值可用近似代替,即将1舍掉,取[x2]为结果。
高阶控制系统的幅值表达式,是由构成该系统所有子环节幅值相乘而得,每个环节的幅值中都含有形如式[x2+1]的项。在求解控制系统剪切频率[ωc]时可理解为求各环节时间常数的倒数,即转折频率[1]。若能确定剪切频率[ωc]的取值范围,就可以比较各环节[ωcωm]和1的大小,从而应用上述取舍法则和剪切频率的定义式求解出控制系统的剪切频率[ωc]。
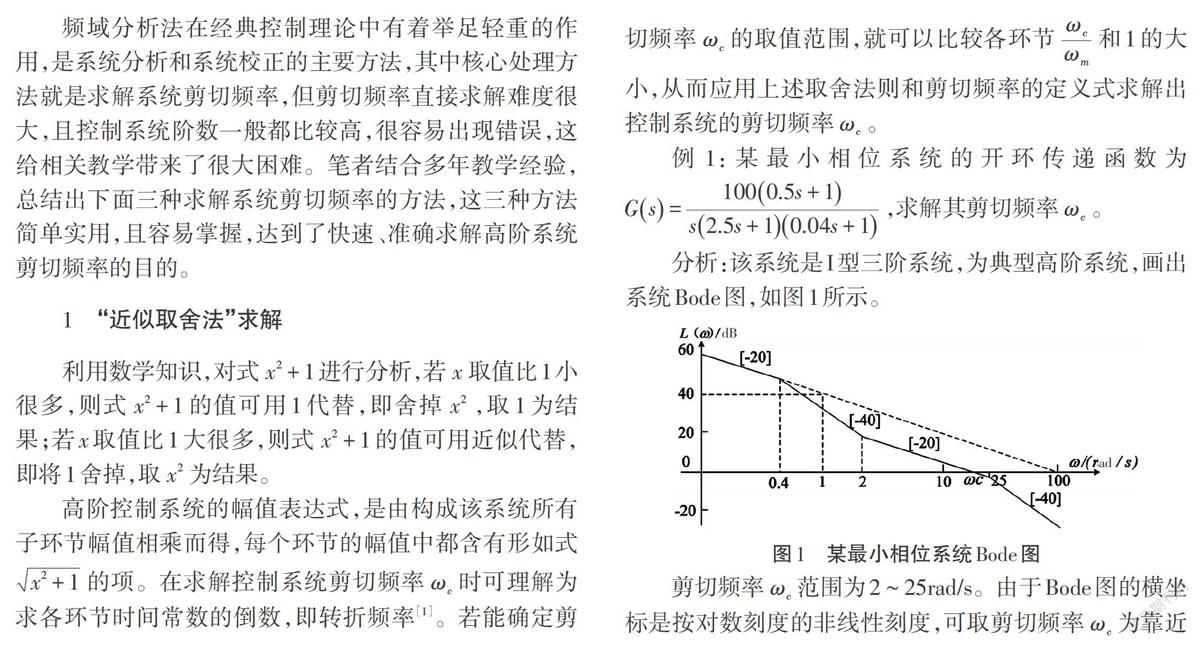
例1:某最小相位系统的开环传递函数为[Gs=1000.5s+1s2.5s+10.04s+1],求解其剪切频率[ωc]。
分析:该系统是I型三阶系统,为典型高阶系统,画出系统Bode图,如图1所示。
剪切频率[ωc]范围为2~25rad/s。由于Bode图的横坐标是按对数刻度的非线性刻度,可取剪切频率[ωc]为靠近25rad/s的一个值。由剪切频率[ωc]的定义可得求[Aωc],如式(1)所示。
[Aωc=1000.5ωc2+1ωc·2.5ωc2+1+1·0.04ωc2+1=1] (1)
将任意一个靠近25rad/s的剪切频率[ωc]值代入式(1)中,按“近似取舍法”可得[Aωc≈100·0.5ωcωc·2.5ωc·1=1],易求得[ωc]为20rad/s。故求解剪切频率在2rad/s至25rad/s之间且靠近25rad/s处。
“近似取舍法”是求控制系统剪切频率的通用方法,适合大多数情况的剪切频率的求解,正确应用该方法关键在于准确确定剪切频率的取值范围。该方法分析和计算量小,简单易懂,并能对所求结果进行验证。
2 “斜率定义法”
控制系统的Bode图是二维坐标系的一种,二维坐标中斜率的定义为[k=ΔyΔx],其中[Δx]和[Δy]分别为二维坐标中某点的横坐标增量和纵坐标增量。若系统Bode图中确定频率处的幅频特性值已知,则可通过幅频特性值求解其剪切频率[2]。
例2:某最小相位系统的Bode图如图2所示,求解其剪切频率[ωc]。
分析:由题目给出的系统Bode图可知,转折频率[ω]为1rad/s时,幅频特性值为20lg2,剪切频率[ωc]处以斜率为-40dB/dec穿越零分贝线,即该点幅频特性值为0,应用斜率定义可得[-40=0-20lg2lgωc-lg1]。已知系统Bode图的横坐标是按对数刻度的非线性刻度,横坐标增量要写成对数差值形式,故求得[ωc=2rad/s]。
“斜率定义法”是应用数学知识求解待求参量的典型应用,该方法不仅可以求解系统的剪切频率,通过合理利用,还可求解复杂控制系统中的其他参数。
3 “典型Bode图法”
在对控制系统分析或校正时,不难发现其Bode图有以下规律:大多数系统的Bode图都是一条斜率仅在转折频率处改变且幅频特性逐渐减小的连续折线,原因是控制系统要兼顾“稳,快,精”的性能指标要求[3]。Bode图高频段主要反映系统的抗干扰能力,对剪切频率影响较小,剪切频率主要由其低频段的开环放大倍数和型数,以及中频过渡段和中频段环节决定。
例3:分别求解如图3所示的三种系统Bode图的剪切频率[ωc]。
由图可知,图3(a)中未给出具体数值,求解出的剪切频率为一个通用表达式,根据题目给出的波特图形式设系统的传递函数为[Gs=KsT1s+1],其中[ω1=1T1]。由剪切频率可求[ωc],如式(2)所示。
[Aωc=Kωc·ωcω12+1=1] (2)
由Bode图可知[ωc]大于[ω1],按“近似取舍法”可得[Aωc≈Kωc·ωcω1],整理可得[ωc=Kω1]。同理可求图3(b)和图3(c)的剪切频率[ωc],过程省略,结果如下:
图3(b)中,[ωc=Kω1ω2];图3(c)中,[ωc=Kω1ω2]。
在应用“典型Bode图法”求解系统剪切频率时,若其Bode图为上述总结的形式之一,在传递函数参数给定的情况下可依据其形式特点快速计算出系统的剪切频率[4]。只要熟练记忆Bode图形式和结论,求解问题时速度会更快,特别适合不需要解题过程的场合。
4 总结
本文总结的三种求解剪切频率的方法具有计算量小、容易掌握的优点,能快速准确地求解系统剪切频率,每种方法都有其应用的场合及特点,需要根据情况选择不同的剪切频率求解法。总之,这三种求解剪切频率方法实用性强,且简单易掌握,有效解决了高阶控制系统分析和校正复杂易错的问题。
参考文献:
[1]崔吉,张燕超.控制工程基础课程中伯德图绘制的探讨[J].高师理科学刊,2016(1):75-76.
[2]陈炜.基于Matlab的控制系统频域分析[J].山东工业技术,2017(20):124.
[3]黄忠霖.剪切频率的一种简捷计算及其计算机校核[J].电气传动自动化,2000(2):46-49.
[4]李素玲.自动控制原理[M].成都:电子科技大学出版社,2007.
