ECA集团研发新型反水雷自主水下航行器
2018-09-10 04:28:22卡洛琳·里斯
无人机 2018年3期
卡洛琳·里斯
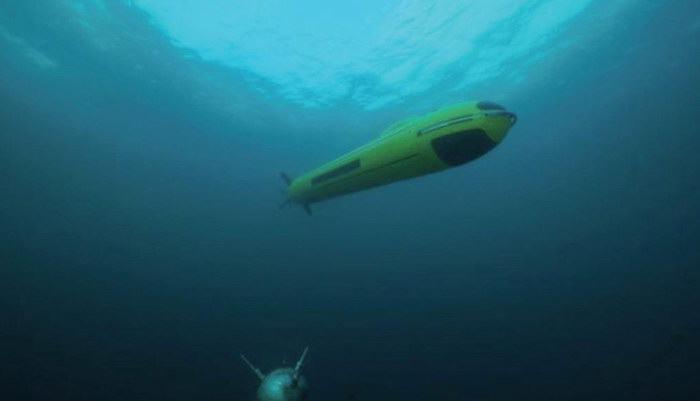
2月27日,ECA集团宣布推出其最新研制的中型自主水下航行器(Autonomous UnderwaterVehicle,AUV)A18-M,专用反水雷作战。A18-M旨在用于水深高达300m以上水域水雷探测和分类。与其他ECA研发的自主水下航行器A9-M和A27-M类似,A18-M是专用于邻近水域反水雷作战,同时没有触发水雷。
这种中型自主水下航行器设计时就考虑了尺寸、重量和续航能力之间的最佳权衡。它拥有大载荷能力,能够搭载合成孔径声纳(SAS)等高性能声纳载荷,提供了前所未有的检测和分类性能。
与以前的反水雷自主水下航行器相比,A18-M结构更紧凑,更易于在无人水面舰艇(USV)等至从小型海军平台上部署。与其他水面船或拖曳系统相比,A18-M拥有很高的稳定性,受海浪影响小,可以获得非常高质量图像。此外,自主水下航行器A18-M能够适应其工作深度的各种环境条件,避免由于声速分层导致的盲区现象。
自主水下航行器A18-M配置有先进的嵌入式处理系统,能够处理声纳实时图像的原始数据,并使用先进的通信网络、通过无人水面舰艇或无人机等网关提取相关数据回传至指挥中心。这些数据可以由在母舰或陆上的声纳操作员进行回放,作进一步识别和处理。
自主水下航行器A18-M还能够探测到简易爆炸装置(IED)和污染物等其他危险,并能提供高度精确的海底地图,使环境得以高保真度的評估。
A18-M集成了合成孔径声纳,具有较高的地区覆盖率,扫描速率达到2km2/h,是配备传统侧视声纳自主水下航行器的5~10倍。这种优化配置使得A18-M能覆盖20~40km2的广大区域,同时,具有优良的图像质量,还能减小人员风险。
ECA集团机器人系统项目主任和声纳专家马克·平托博士说,“由于配置了宽波段合成孔径声纳,其非常高的横向和纵向分辨率大大改善了系统的性能增益。其边缘检测精度达到2.5cm×3cm,这是任何类型平台配置的其他类型声纳无法实现。除了一小部分埋藏或隐藏的未知水雷之外,所有已知的水雷都能检测到,也可以从提取高亮度和阴影结构图像中提取高质量的分类信息”。
A18-M可以集成到一个更大的无人系统平台中去,例如,ECA集团的无人海上集成系统(Unmanned MaritimeIntegrated System,UMIS),并可以利用这些系统的公共接口、通信网络和数据处理系统等优势。
A18-M加入并提高了ECA集团反水雷的机器人系统团队性能,并可以成为无人水面艇“检查员”MK2(INSPECTORMK2)、成套“遥控潜航海上扫描器”(ROVSEASCAN)和可消耗反水雷装置的K-STERC。所有这些机器人可以在一起工作,同时完成任务(或为无人水面艇“检查员”MK2)。无人水面艇“检查员”MK2将作为通信中继,将已收集到的预处理信息和自动目标检测(Automatic Target Detection,ATD)结果发送到母船上或岸上的指挥和控制系统,以部署识别和处理装置。这是第一个功能全面的无人海上系统,包括了无人水面艇、自主水下航行器、遥控潜航器和EMD等所有类型的海上机器人。
(王晓丽编译)
猜你喜欢
食品界(2023年1期)2023-08-15 00:55:27
农产品质量与安全(2022年3期)2022-05-28 07:58:02
潍坊学院学报(2021年2期)2021-07-22 07:59:24
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:16
数字海洋与水下攻防(2020年5期)2021-01-04 01:39:54
中国化妆品(2020年6期)2020-11-14 15:59:41
电脑知识与技术(2019年13期)2019-07-08 02:23:41
广东第二课堂·初中(2017年6期)2017-06-30 13:10:55
中学历史教学(2016年4期)2016-11-11 07:11:33
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23