
一种低成本电路设计在伺服控制系统中的应用
2018-09-10 20:29范缜煜
河南科技 2018年4期
范缜煜


摘 要:本文介绍了一种基于DSP和分立驱动电路的伺服控制电路设计方案,通过优化电路设计,实现低成本设计,既能满足控制精度、响应速度等性能要求,又控制了体积。系统采用TMS320F2812型DSP为主控单元,以最简单的方式配置外围电路;算法上采用带有前馈补偿的PID的控制方式,通过脉宽调制实现对有刷电机的控制。
关键词:DSP;分立驱动;伺服控制;脉宽调制;有刷电机
中图分类号:TN966 文献标识码:A 文章编号:1003-5168(2018)04-0047-02
An Application of Low-cost Circuit Design in Servo Control System
FAN Zhenyu
(China Airborne Missile Academy,Luoyang Henan 471009)
Abstract: This paper presented a servo control design based on DSP and the discrete drive circuit. By optimizing the circuit design, this low-cost scheme can satisfy the specification performance for accuracy and response time, which also limits the circuit size. The corresponding system, in which the DSP of TMS320F2812 is used as the main control unit, is equipped with the simplest periphery circuits. Using the PID control with feed forward compensation as its algorithm, the controller accomplishes the brush motor control with pulse-width modulation.
Keywords: DSP;discrete drive;servo control;pulse-width modulation;brush motor
目前,导弹舵机的伺服系统控制电路多采用控制板加功率驱动板两层板级设计的结构形式,在装配过程中,占据较大体积。因此,对体积和成本控制较为敏感的设计中,低成本、小体积伺服系统控制电路设计尤为重要[1]。
本文提出了一种基于DSP和分立驱动电路的伺服控制电路设计方案,通过吸收现有型号成熟设计的同时,优化电路设计,能满足控制精度、响应速度等性能要求,实现低成本、小体积设计。目前,该方案已在某低成本舵机中得到应用。
1 方案设计
1.1 工作原理
伺服系统控制电路单通道工作原理如图1所示。
舵机系统是导弹系统的执行控制机构。从图1可以看出,当接收到飞行控制指令后,作为舵面位置反馈的反馈电位器信号进行综合和误差计算,并将误差信号经过DSP电路的控制策略计算,形成脉宽调制控制信号[2]。该脉宽调制控制信号经过驱动电路和功率放大,驱动伺服电动机转动,伺服电动机带动减速器。伺服电动机转动通过传动机构带动舵面偏转,形成与舵控指令一致的舵偏角,从而完成舵机系统的闭环控制。
1.2 结构尺寸设计
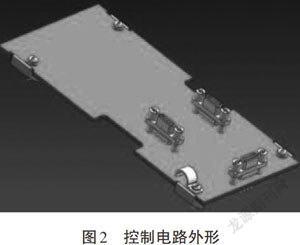
本文的硬件电路采用控制驱动一体化设计,设计建模如图2所示。采用一体式设计能节约空间,降低成本,减少接插件对接,进一步提高控制电路的可靠性。在印制电路板布局方面充分考虑供电电源及电信号特性的差异,合理分配各种信号的走线方式,在一定程度上满足电磁环境要求。
1.3 驱动电路设计
驱动电路的主要功能是完成驱动信号的隔离、放大,通过一定的逻辑组合完成功率管的开通关断,从而控制有刷直流电机的运转[3]。
单通道分立功率驱动电路原理如图3所示。
其中,IRS21844SPBF为自举式高电压、高速半桥驱动器,2片IRS21844SPBF即可组成H桥全桥驱动电路。IRS21844SPBF芯片高端悬浮通道采用外部自举电容2C5、2C8产生悬浮电压源VBS,与低端通道共用一个外接驱动电源+12V。自举电路工作原理为:当2Q1导通时,2D6的VS端电位被拉低至地,+12V通过自举二极管2VD2开始向自举电容2C8充電,这样就在V和V之间形成了一个悬浮电压VBS用来给2Q2供电,保证2Q2的正常开通。自举电路的存在可使H桥电路上下桥臂MOSFET仅需一路电源,简化了电路。
H桥电路由4只MOSFET器件AON6270组成,其漏源极电阻RDS不大于5mΩ,最大耐电压VDS为75V,最大漏极电流ID为85A,且不需要散热设计,既保证了电机的运行,又可以减小电路体积。
1.4 控制方式
系统在软件设计上采用了一种推挽式的控制方式,有别于以往的H桥对管控制方式,即一路方向信号和一路速度信号分别控制H桥的左右桥臂[4],如图4所示,UA为高,UB为低时,Q1、Q4导通,Q2、Q3截止,电机逆时针转动;当UA为低,UB为高时,Q1、Q4截止,Q2、Q3导通,电机顺时针转动;UA、UB同时为高或低时,Q1、Q3或Q2、Q4为高,电机不转动。这种控制方式的好处在于当系统处于零位时电机无零耗电流。
2 结论
在常温测试中,通过上位机给控制电路发送±20°阶跃信号时,实际的反馈波形如图5所示。其中,黑色实线为舵机控制信号,红色实线为舵机反馈信号,波形显示该电路能正常跟随动作,满足测试技术要求。
试验结果表明:控制电路稳定性好,性能指标均能满足舵机伺服系统设计精度,达到了对执行机构转速控制的要求,证明本文提出的控制电路方案可以实现对伺服系统的控制。
参考文献:
[1]吴大勇,贾敏智.STM32在三相无刷直流电机控制系统中的应用[J].微电机,2014(3):47-51.
[2]郭庆伟,宋卫东,王毅,等.舵机控制延迟误差分析与补偿方法研究[J].中国测试,2017(5):127-131
[3]蒋范明,陈伟.宇航应用永磁同步电机矢量控制驱动电路设计[J].电力电子技术,2017(6):61-63.
