
含沙量监测的wavelet—Kalman多尺度融合研究
2018-09-10 17:56付立彬刘明堂王丽秦泽宁杨阳蕊
人民黄河 2018年9期
付立彬 刘明堂 王丽 秦泽宁 杨阳蕊

摘要:为解决黄河含沙量监测时传感器易受环境因素影响的问题,简述了音频共振法测量含沙量的原理,探讨了音频共振传感器的谐振频率和含沙量监测之间的关系,提出了贯序式wavelet-Kalman多尺度融合模型,对音频共振传感器的谐振频率进行小波分解,把含沙量数据组成贯序式数据块进行多尺度分析,提取含沙量信号序列中的突变值,建立了Kalman融合方程,将温度信息作为控制信号,消除了环境因素对含沙量监测的影响,并进行了含沙量测量的反演和误差分析。结果表明:贯序式wavelet-Kalman多尺度融合模型能够有效地消除环境影响,提高系统测量的精度和稳定性,平均绝对误差为3.95kg/m2,均方根误差为3.13kg/m3,比其他反演模型的误差小。
关键词:音频共振法;贯序式;小波多尺度分析;卡尔曼融合;含沙量监测
中图分类号:P335 文献标志码:A doi:10.3969/j.issn.1000-1379.2018.09.005
悬浮泥沙使得高含沙河流具有特殊的产流、汇流、产沙和输沙规律,会造成河床的剧烈变化。黄河是典型的悬浮泥沙含量较高的河流,也是世界上最复杂、最难治理的河流之一。目前黄河等多沙河流上的泥沙采样设备大多仍采用传统的采样器,部分重要河段只能获取低量程、低精度的含沙量信息。为了更好地研究黄河流域土壤侵蚀机理和防治水土流失,就必须建立黄河高悬浮含沙量在线实时监测系统。
比较先进的含沙量监测方法有射线法、声学法、光学法、电容差压法、浮力法、浊度法、遥感光谱分析法等。这些方法在实际应用中有各自的优势,但也有各自的局限性。监测含沙量时,传感器一般是直接插人水体,采集的信号会受到水温、流速和深度等因素影响。这些影响因素会给监测系统带来一定的干扰,造成传感器时间序列信号中存在相应的突变信息,使得测量系统运行失稳。因此,研究含沙量传感器的线性输入输出特性变化并进行含沙量信息多尺度分析具有重要的意义。
小波(wavelet)分析方法是研究水文信息序列多尺度变化特性的有效工具。在含沙量时间序列分析中,同样可以运用小波的多尺度分析方法,提取含沙量传感器突变的输入输出特性信息。卡尔曼(Kal-man)滤波是根据测量数据变化不断融合的过程,可减少环境因素的干扰。因此,本文提出基于贯序式(sequential)小波多尺度分析和卡尔曼滤波融合的含沙量监测模型,采用音频共振法来监测黄河含沙量,并同时监测含沙水体的环境信息,进行含沙量数据融合处理,以提高测量系统的精度和稳定性。
1 硬件平台及试验数据
1.1 硬件平台搭建
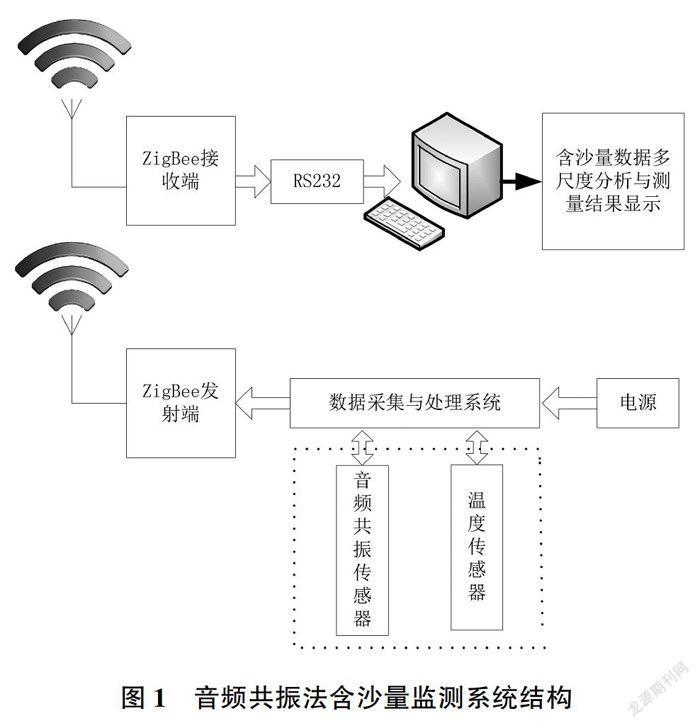
图1为含沙量监测系统的整体结构。该系统将含沙量、水温等传感器集成在一起,可完成多通道信息采集与处理工作。处理后的数据通过ZigBee技术无线传送给信息处理中心,信息处理中心通过仿真界面实时显示测量结果。
1.2 试验材料和试验数据
试验材料来源于花园口水文站附近的黄土(含有细沙),同黄河泥沙具有一定的相似性,平均粒径为176.42μm,中值粒径为96.56μm。每次试验都记录音频共振传感器的输出值K和水温T,同时用比重瓶获取含沙量实测值。
从大量试验数据中经过转换、滤波、异常值剔除等环节后,本文选取92组数据块(data block)进行数据融合分析。其中第1组到第46组数据用来拟合,第47组到第92组数据用来验证。受试验条件限制,本文只进行了水温的环境变量监测。
2 多尺度融合模型建立
2.1 谐振频率的小波分解
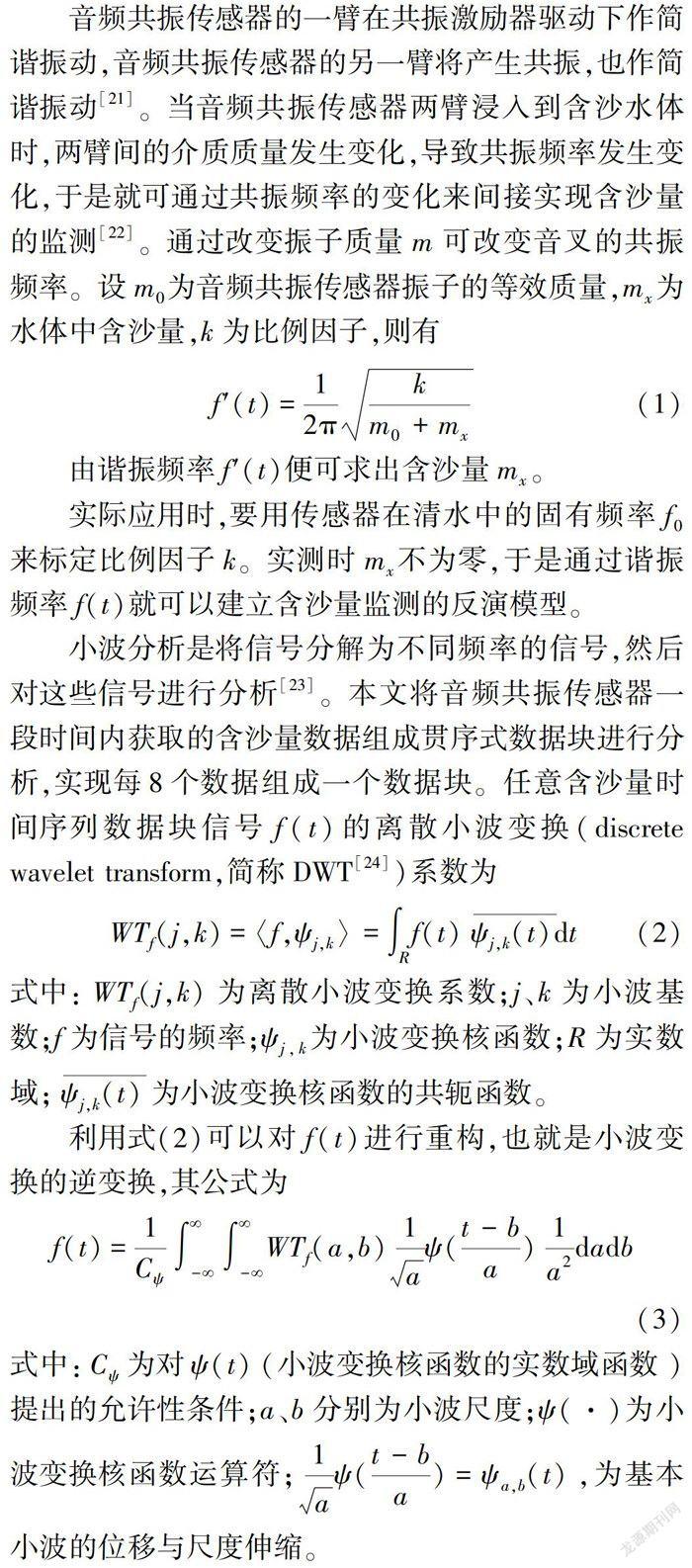
音频共振传感器的一臂在共振激励器驱动下作简谐振动,音频共振传感器的另一臂将产生共振,也作简谐振动。当音频共振传感器两臂浸人到含沙水体时,两臂间的介质质量发生变化,导致共振频率发生变化,于是就可通过共振频率的变化来间接实现含沙量的监测。通过改变振子质量m可改变音叉的共振频率。设m0为音频共振传感器振子的等效质量,mx为水体中含沙量,k为比例因子,则有
由谐振频率f'(t)便可求出含沙量Mx。
实际应用时,要用传感器在清水中的固有频率f0来标定比例因子k。实测时mx不为零,于是通过谐振频率f(t)就可以建立含沙量监测的反演模型。
小波分析是将信号分解为不同频率的信号,然后对这些信号进行分析。本文将音频共振传感器一段时间内获取的含沙量数据组成贯序式数据块进行分析,实现每g个数据组成一个数据块。任意含沙量时间序列数据块信号f (t)的离散小波变换(discretewavelet transform,简称DWT)系数为
WTf(j,k)==∫Rf(t)ψj,k(t)dt(2)式中:WTf(j,k )为离散小波变换系数;j、k为小波基数;f为信号的频率;ψj,k为小波变换核函数;R为实数域;q's.k( t)为小波变换核函数的归轭函数。
利用式(2)可以对f(t)进行重构,也就是小波变换的逆变换,其公式为式中:Cψ为对ψ(t)(小波变换核函数的实数域函数)提出的允许性条件;a、b分别为小波尺度;ψ(·)为小小波的位移与尺度伸缩。
2.2 卡尔曼和温度融合模型
应用动态多尺度系统理论建立基于Kalman滤波的多尺度状态估计方程,能有效降低测量的均方误差。但是,一般的Kalman滤波模型仅对状态方程和测量方程进行融合处理,并没有考虑环境信息对Kalman滤波模型的融合作用。当不考虑控制信号的作用时,Kalman滤波的估值效果往往不够理想。此时,传感器需要进行环境信息的融合处理,以削弱環境因素的影响。一般来说,温度对传感器测量过程的影响较大,需要进行温度补偿。传统的温度补偿方法是通过寻找试验数据的统计规律来进行软件补偿。本文建立的wavelet-Kalman模型是在进行Kalman估值时直接进行温度补偿。当把温度信息作为控制信号时,Kalman滤波公式可变为
X(j,k+1)=F(j,k)WTf(J,k)+G(j,k)t(j,k)+
w(j,k)(k≥0)(4)
Z(j,k)=H(j,k)WTf(j,k)(k≥0,j=1,2,…,N)
(5)式中:X(j,k+1)为在某一尺度j上k+1时刻的系统状态;WTf(J,k)∈Rn×1;F(j,k)为系统矩阵,F(j,k)∈Rn×n;G(j,k)为温度控制参数;t(j,k)为j尺度下环境温度控制变量;Z(j,k)为j尺度下k时刻的值;H(j,k)为小波变换的参数矩阵;w(j,k)为噪声,且满足式(6)。
E{w(j,k)}=0(k≥0)
E{w(j,k)w(j,l)T}=Q(j,k)δkl(l≥0)(6)式中;E(·)为数学期望值函数;Q(j,K)为非负定对称阵;δkl为狄拉克函数。
卡尔曼滤波通过无偏估计来达到方差最小,实现卡尔曼最优估计。整个计算流程分为两部分,一部分是估值的计算流程,另一部分是估值增益的递推计算流程。具体推导公式可参照卡尔曼最优滤波的5条基本公式。
3 贯序式wavelet-Kalman多尺度融合分析
3.1 基于wavelet的单尺度分析
先用小波函数对音频共振传感器的输出信号进行单尺度分解,设、为音频共振传感器输出的原始信号,cal为小波分解后的低频系数,cdl为小波分解后的高频系数。可以看出用单尺度低频系数cat重构的含沙量信息与传感器输出的原始信号波形基本上一致,且低频系数cat和高频系数cdl的信号幅值都是原始信号、的一半。
3.2 基于wavelet的多尺度分析
由多尺度分析结果可以看出,尺度3(小波分析的第3层)的低频系数ca3占整个数据长度的1/4,尺度2的低频系数cat的长度占整个数据长度的1/4。剩下长度的一半是尺度1的高频系数cdl。由此可知,低频系数反映了含沙量信号的轮廓和基本信息,并且各层的系数数量随着分解层数的增大而减小,原始含沙量数据相应的噪声得到抑制。因此,可通过对数据进行多尺度变换,提取小波低频系数来表示含沙量的整体特征,同时利用最小二乘法进行回归分析,建立不同分解层的反演模型并进行检验,确定最佳的小波分解估算模型。
3.3 基于贯序式wavelet-Kalman的多尺度融合分析
小波的分解和重构过程中,若小波分解层数偏小,则低频子序列仍是含沙量多个时间尺度上信号的混叠,不能很好地消除噪声;反之,当小波分解层数过大时,会产生虚假含沙量信息,造成含沙量测量误差累积等问题。目前,小波分析时确定分解层数的常用方法是通过自相关分析对各层小波系数进行白化检验,但这种白化自相关分析方法存在分解层数选择不合理的问题。从表1可以看出,4种小波母函数中,Db8(Daubechies8)、Sym8(Symlets)和Bior6.8(bior-wavf)均是以小波分解的第5层系数构建的模型的均方根误差扭MSE)最小(6.717 4 _< RMSE <7.6654),稳定性最好,且Sym8小波模型的均方根误差小于Db8、Coifs(Coiflets)和Bior6.8的。
4 结果与讨论
4.1 贯序式wavelet-Kalman多尺度融合结果
分别采用Db8、Sym8,Bior6.8、Coifs共4种小波进行多层离散分解后得到小波低频系数,并对另外一组数据进行反演,选取均方根误差作为指标来衡量模型精度。RMSE越大反演模型的精度越低。
贯序式wavelet-Kalman多尺度融合模型选取Sym8小波的ca5层进行小波分解。由于贯序式wavelet-Kalman多尺度融合模型考虑了环境因素的影响,因此输出结果更接近实测值,反演效果更好,误差更小,见图2、图3。
4.2 贯序式wavelet-Kalman融合误差比较
为了衡量贯序式wavelet-Kalman多尺度融合模型的效果,给出了多个反演模型的均方根误差、最大绝对误差(MaxAE)、平均绝对误差(MeanAE)和平均相对误差(MeanRE),见表2。由表2可以看出,贯序式wavelet-Kalman多尺度融合模型的效果最好,其MeanAE为3.95kg/m3,RUSE为3.13kg/m3,MaxAE为14.15kg/m3,MeanRE为1.05kg/m3。表2中的wavelet-Kalman滤波模型是指用Kalman算法进行滤波处理,没有用Kalman算法进行温度融合处理,其处理效果较贯序式wavelet-Kalman多尺度融合模型的稍差一些,而Kalman和温度融合模型的误差比一元和多元线性回归模型的小。
从表2还可以看出,经过wavelet多尺度分析和Kalman融合后,音频共振传感器的测量误差都比多元及一元线性回归的小。整体而言,一元线性回归的相对误差较大,但平均相对误差也在5%以内,可满足含沙量测量的需要。
一元线性回归方程是采用前46组数据块拟合得出的,其表达式为:
y=2.774x+356.3(7)式中:J为含沙量;x为加沙过程中含沙量信息通过音频共振传感器转换的电流值。
多元线性回归方程为
S=-477.9815+1.4152X1-0.2769X2(8)式中:X1为音频共振传感器的输出信号;X2为温度传感器的输出信息值。
一元线性回归模型的MeanAE为16.22kg/m3,RUSE为20.18kg/m3,MaxAE为46.90kg/m3。多元融合后的误差较一元线性回归的小些,说明考虑不同的环境因素影响,融合效果有提高,但还不是很理想。
5结语
(1)当应用多尺度分析方法提取含沙量信息的突变值并能融合环境因素时,监测误差相对小,监测精度和稳定性相对高。
(2)贯序式wavelet-Kalman多尺度融合模型能有效提取含沙量的突變信息,同时考虑了环境因素影响,提高了含沙量监测的精度,增强了测量系统的稳定性。
(3)音频共振法在高悬浮含沙量监测时误差较小,监测精度较高,表明音频共振传感器较适合于高含沙量河流中使用,特别适用于黄河流域的高悬浮含沙量监测。
