
基于化学反应优化算法的车辆路径问题
2018-09-08 02:08:16蒋海青赵燕伟冷龙龙
计算机集成制造系统 2018年8期
蒋海青,赵燕伟,冷龙龙
(1.浙江工业大学 特种装备制造与先进加工技术教育部重点实验室,浙江 杭州 310014; 2.中国计量大学 现代科技学院,浙江 杭州 310014)
0 引言
半个多世纪的研究使车辆路径问题(Vehicle Routing Problem, VRP)从问题描述到求解方法都取得了丰硕的成果,但如何获得满意的求解方法依然是VRP中具有挑战性的研究领域[1]。VRP的求解方法大体分为精确式、启发式和智能优化3种,精确求解方法如动态规划、分支定界等[2],启发式算法如节约法[3]、扫描法[4]及文献[5-6]对这两种算法的改进。由于启发式算法一般求到的是局部最优解,VRP目前的求解方法主要以智能优化算法为主,如遗传算法(Genetic Algorithm, GA)[7-8]、禁忌搜索(Tabu Search, TS)算法[9-10]、模拟退火(Simulated Annealing, SA)算法[11-13]、蚁群优化(Ant Colony Optimization, ACO)算法[14-17]。
石兆[18]总结智能优化算法在VRP的应用认为,禁忌TS算法搜索时间短,但禁忌规则难以确定;SA算法在不考虑计算时间时求得的解最好;ACO算法的搜索速度较慢,且较易出现早熟问题。鉴于智能优化算法的不足,近年来人们尝试从以下两方面进行算法改进:
(1)将多种算法进行集成 如Boon等[19]提出的集成差分算法,通过扩展TS算法求解车辆路径问题;Teymourian等[20]将改进智能水流算法(Enhanced Intelligent Water Drops, EIWD)和布谷鸟搜索(Cuckoo Search, CS)算法结合,并应用局部搜索混合算法(Local Search Hybrid Algorithm, LSHA)和后优化混合算法(Post-Optimization Hybrid Algorithm, POHA)局部搜索解决带有容量约束的车辆路径问题(Capacity Vehicle Routing Problem, CVRP);Akpinar[21]将大规模邻域搜索(Large Neighbourhood Search, LNS)与蚁群算法ACO结合组成LNS-ACO算法求解CVRP问题,该算法应用ACO构造新的解,应用LNS进行解的改进,结合基于插入的局部优化方法在大量CVRP案例中获得了满意的结果;张景玲等[22]将量子进化算法与免疫算法结合,提出自适应免疫量子进化算法求取动态VRP;曹高立等[23]设计了混合量子算法求解CVRP,并采用二维量子位观测模型和可见度生成解改善求解效果。
(2)将新算法引入VRP的求解 例如Szeto等[24]应用人工蜂群(Artificial Bee Colony, ABC)算法求解CVRP,并结合insertion,swap多种局部优化方法改善解;Korayem等[25]提出运用灰狼算法求解CVRP;Tahayassene等[26]提出一种和声搜索算法meta-HSA(meta-harmony search algorithm),通过设置求解器和优化器求解带时间窗的车辆路径问题(Vehicle Routing Problems with Time Windows, VRPTW),并采用交换、2-opt的方法进行局部优化搜索,以提高解的性能;Yurtkuran等[27]提出类电磁场算法(Electromagnetic Field Algorithms, EFA)求解CVRP,并应用swap局部优化方法改善解的性能;Dorronsoro等[28]提出元胞遗传算法(Cellular Genetic Algorithm, CGA)求解CVRP,并构建基于交换和2-opt的局部优化方法提高解的性能。
上述改进算法虽然在解决VRP的有效性和优越性都得到了验证,但还是存在一些问题:①在子代解的构造中,当父代和母代解不合法时,就不能由其再产生子代解,从而限制了全局搜索范围;②两种算法集成时一般是由一种算法生成一个解,另外一种算法进行解的改善,较难实现两种算法的彻底融合。
化学反应优化(Chemical Reaction Optimization, CRO)算法是2010年由Lam等[29]提出的用于解决NP-hard问题的新型算法,算法根据分子在其势能面(Potential Energy Surface, PES)中能量越低状态越稳定的特性,通过模拟化学反应中分子间的相互作用来寻求分子最小势能。在求解时,通过其基本组成单元——分子结构来描述问题特性,即用分子表示问题的解,通过分子内部原子之间的反应(如碰撞、交换等)改变分子结构,寻求分子势能降低的途径。随着解的改进,分子势能逐步下降,当其势能最低时,分子达到稳定状态,这时的分子结构即为问题的最优解。与ACO,SA,GA等智能算法的不同之处是,CRO的参数意义简单且易于设置,只需要设置一个参数就能发生化学反应,每次反应都可以获得新的混合解,使其每代都有广泛的搜索空间。除此之外,其4种化学反应极易与其他智能算法结合,实现算法集成。因此,CRO已经被成功应用于连续性问题求解[30],如电流优化问题[31]、网络编码优化[32]、自行车定位问题[33]、集合覆盖问题(Set CoveringProblem, SCP)[34]、背包问题[35]、任务调度[36]、频谱分配问题[37]等各类组合优化问题。尽管如此,文献[38]在对CRO的分析中认为其适合于目标问题的求解,而VRP与背包问题、分配问题及定位问题一样属于离散型NP-hard问题,且具有诸多相似性,因此本文探讨应用CRO算法解决CVRP,以期丰富CVRP的有效求解方法。为适应CVRP的特征,本文设计了包括配送中心、顾客整数序列的分子结构,采用节约法进行了分子的初始化,以提高初始解的质量;在分子的交换、撞墙反应中借鉴遗传算法的交叉、变异操作,应用分解反应扩大求解范围,将单个分子分解成保留父代、母代一定特征的两个分子,在合成反应中充分考虑了距离对成本的影响,将两点间的最短距离作为子代分子的选择依据;通过设置动态变化参数控制4种化学反应发生的频率,来提高算法的执行效率。为测试算法的有效性,本文对经典的benchmark基准实例的P,A问题进行了求解,并与当前先进算法进行了比较,实验结果显示,所提CRO算法具有一定的优势。
1 问题描述
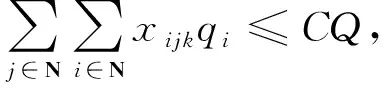
CVRP可以描述为:由一个配送中心为多个顾客服务,车辆从配送中心出发,配送完成后返回出发的配送中心,问题的目标是获得总距离最小的最佳配送方案。将顾客与配送中心组成的网络图设为G=(N,A),其中:N=Nm∪Nc,Nm=0为配送中心集合,Nc=(1,2,…,c)为顾客点集合;A={(i,j):i,j∈N,i≠j}为点i,j的弧集合。K=(1,2,…,k)为车辆集合,dij为i,j的距离,车辆的载重限制为CQ,qi为i点需求。为便于建模,本文对问题进行如下假设:①车辆匀速行驶,路上无拥堵现象,路况平稳;②配送车辆数量不限,车辆类型只有1种;③客户需求已知并确定,每个客户必须且只能被服务一次。用模型表达如下:
(1)
s.t.

(2)

(3)
(4)
(5)

(6)
xijk∈{0,1},∀i,j∈N,k∈K。
(7)
其中:式(1)表示距离最短的目标函数;式(2)和式(3)保证每个顾客只能被服务一次;式(4)表示顾客需求限制;式(5)表示消除子回路;式(6)保证每辆车配送完后回配送中心;式(7)表示变量的取值。
2 化学反应优化算法
设分子ω的能量由势能PEω和动能KEω组成,在反应过程中,PEω逐渐减小, CVRP的目标是获得最短距离,因此本算法将PEω作为目标函数。但如果在算法设计时,单纯追求势能最小值,则极有可能只能求取到局部最优解。为了求得全局最优解,在CRO算法中通过调节动能,使新产生的分子ω′的PEω′即使大于PEω,ω′也能以一定的概率保留。CRO算法寻优的基本反应包括单分子反应和双分子反应,单分子反应主要有撞墙反应和分解反应,双分子反应主要有交换反应和合成反应。当分子之间的碰撞强度不大时,发生撞墙反应或交换反应,这两个反应一般获得原分子的邻域解,分解反应和合成反应在当分子发生剧烈碰撞时用于打破局域解。下面简单介绍这些反应:
(1)撞墙反应 指分子与容器壁发生碰撞后形成新分子的过程。若原分子为ω,则新分子ω′=neibour(ω),即新分子为原分子的邻域函数,撞墙反应发生的条件为
PEω+KEω≥PEω′。
(8)
反应后,KEω′=(PEω+KEω-PEω′)×q,其中q∈[KELossRate,1],KELossRate为能量损失最大百分比,损失的能量值保存在能量中心,用于提供分解反应所需能量,将能量中心的能量值表示为buffer。
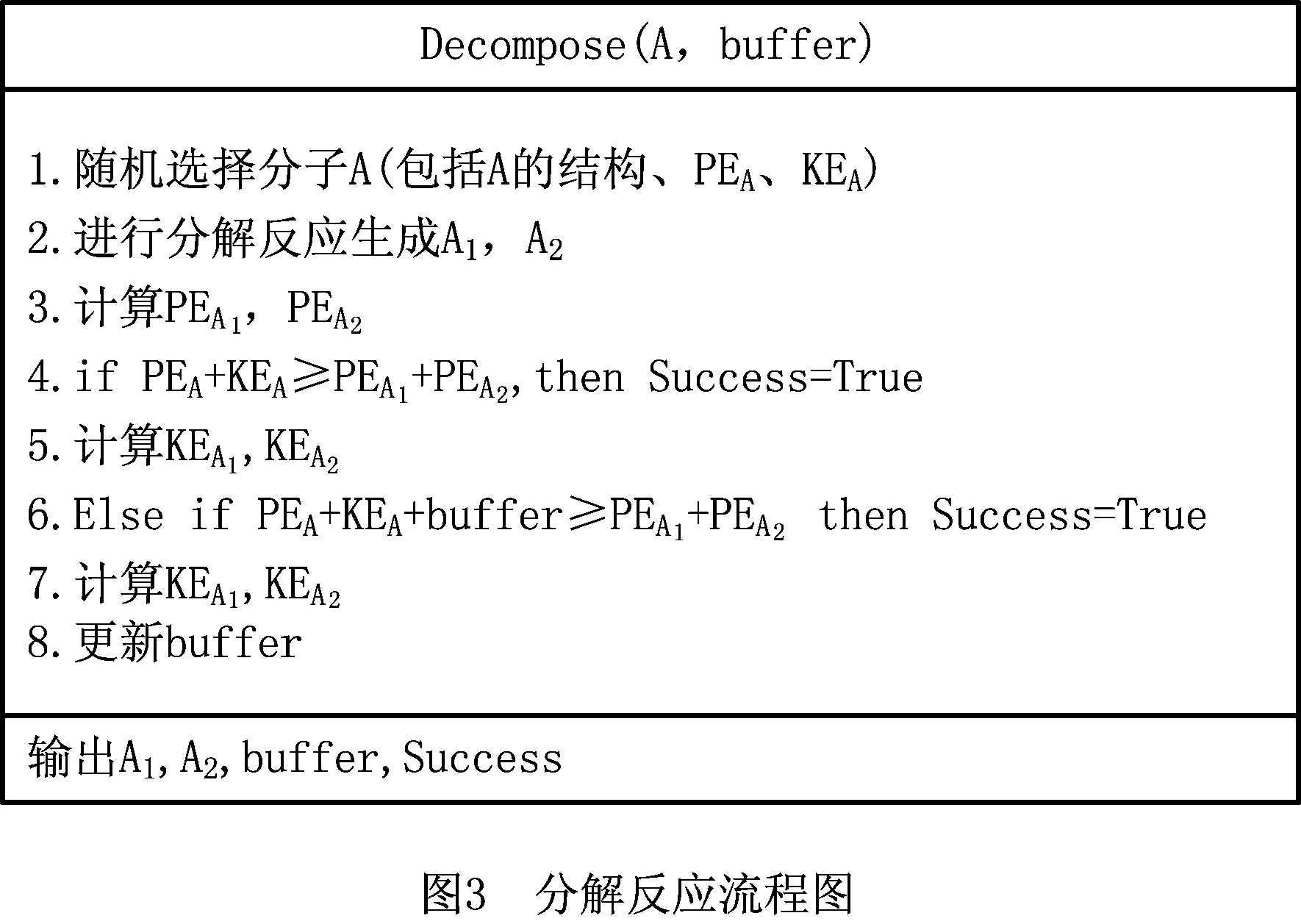
(2)分解反应 指分子在容器中发生猛烈碰撞后,由1个分子分解为2个分子的过程。若原分子为ω,新分子为ω1和ω2,则分解反应发生的条件为
PEω+KEω≥PEω1+PEω2。
(9)
因在撞墙反应中,KEω逐渐减小,当式(9)不易满足时,若能满足
PEω+KEω+buffer≥PEω1+PEω2,
(10)
则能发生分解反应。
若式(9)成立,则KEω 1=temp×k,KEω 2=temp×(1-k),其中temp=PEω+KEω-(PEω1+PEω2),k为[0,1]的随机数;若式(10)成立,则KEω 1=(temp+buffer)×m1×m2,KEω2=(temp+buffer-KEω1)×m3×m4,其中m1,m2,m3,m4为[0,1]的随机数。
(3)交换反应 指容器中两个分子发生碰撞,各自被弹开后产生的变化。若原分子为ω1和ω2,新分子为ω′1和ω′2,则交换反应发生的条件为
KEω1+KEω2+PEω1+PEω2≥PEω′1+PEω′2。
(11)
反应后,temp=KEω1+KEω2+PEω1+PEω2-(PEω′1+PEω′2),KEω′1=temp×k,KEω′2=temp×(1-k),其中k为[0,1]的随机数。
(4)合成反应 指容器中两个分子发生剧烈碰撞后合成一个分子的过程。若原分子为ω1和ω2,新分子为ω′,则合成反应发生的条件为
KEω1+KEω2+PEω1+PEω2≥PEω′。
(12)
反应后,KEω′=KEω1+KEω2+PEω1+PEω2-PEω′。
3 CRO应用于CVRP问题
3.1 初始分子
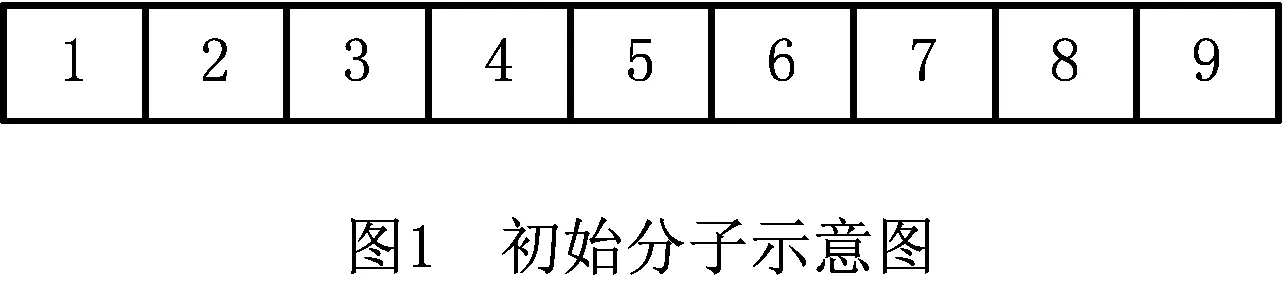
将分子结构表示为由配送中心和顾客组成的整数序列,对于有n个顾客的配送,将配送中心编号设置为1,顾客编号从2~n开始。首先对每个顾客i形成1-i-1的线路,按Sij=Ci1+Cj1-Cij计算插入顾客j后的Sij值,并将其由大到小排序,若最大Sij值对应的j顾客插入能满足载重条件,则将该j顾客插入1-i-1路线,直到所有顾客都能安排为止。如图1所示为构建的某初始分子,表示2辆车服务8个顾客,第1辆车服务2,3,7顾客,第2辆车服务1,4,5,6,8顾客,将此时的距离设置为初始势能值。
3.2 撞墙反应
借鉴GA的互换变异操作,撞墙反应采用位置交换法改变分子结构的流程如下:
(1)在容器库中随机选择一个分子ω。
(2)随机产生两个位置,交换两个位置的顾客,产生新分子ω′,其执行流程如图2所示。

3.3 分解反应
CRO算法分解形成的两条新路线不仅应保留原路线的部分特点,还要能扩大搜索范围。借鉴GA的循环交叉设计以下分解反应:从种群中随机选一个分子ω,再随机选一个位置pos,分解后的分子ω1保留pos前部分,将后部分反转,ω2保留pos后部分,将前部分反转,若原分子为34825679,pos=4,则分解后的两个分子分别为34829765和28435679,分解反应的执行流程如图3所示。
3.4 合成反应
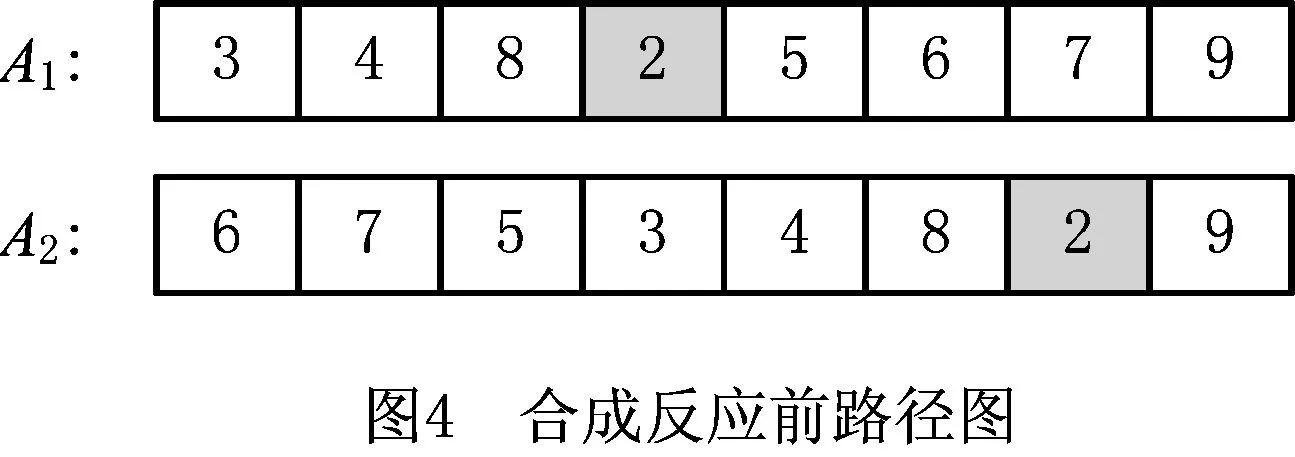
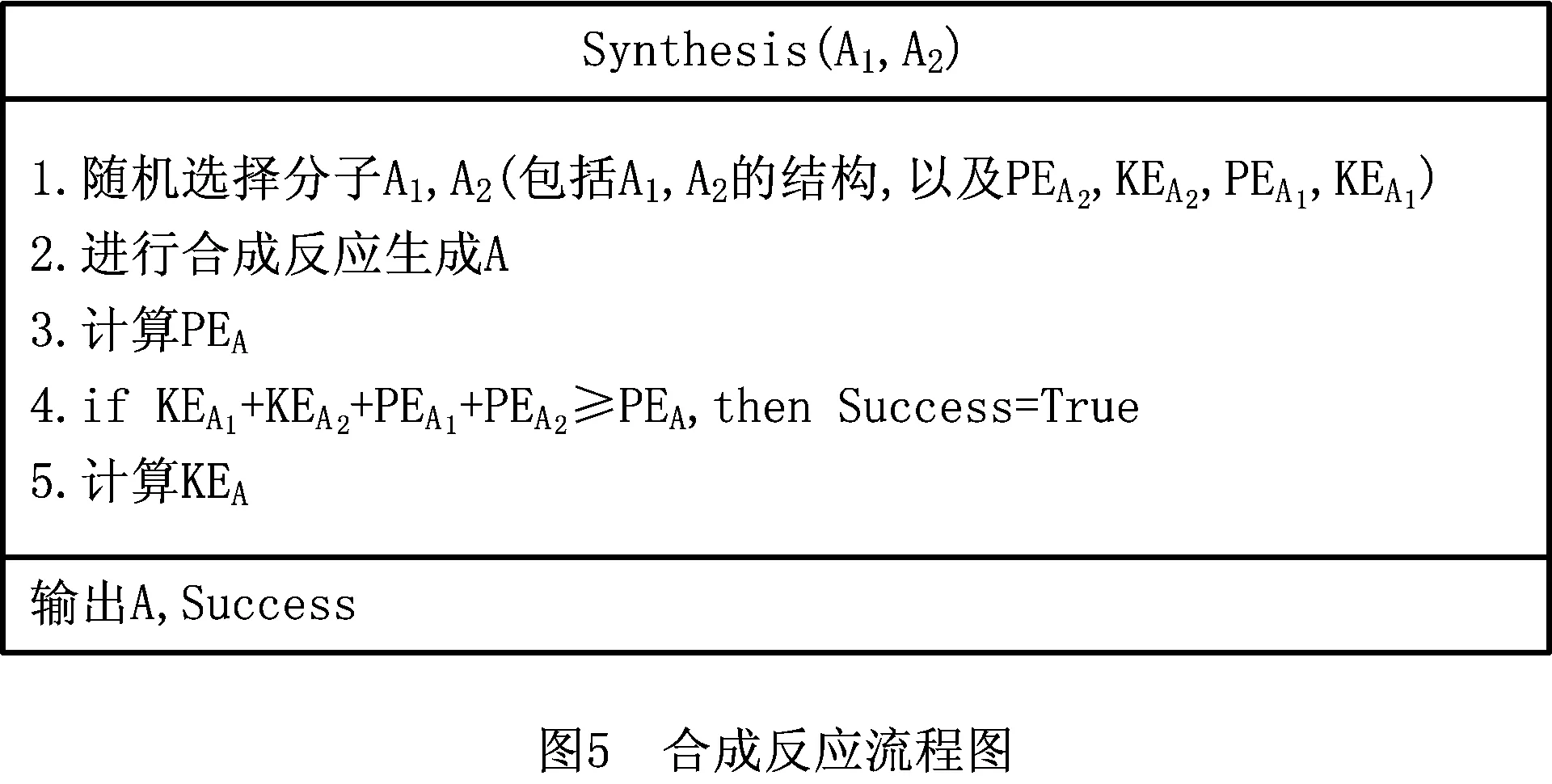
合成反应是将两条路线合并生成一条路线的过程。考虑到问题的目标是总路径最短,在合成过程中参考文献[39],将相邻点距离最短的顾客点作为新路径节点。具体实施过程为:首先在种群中随机选择两个不相同的分子A1和A2;在分子A1中,随机选择一个顾客作为合成路径的第1个顾客点,分别计算A1,A2中该顾客点与其后相邻点的距离,选择最短距离所对应的顾客点为合成路径的下1个顾客,重复上述过程直到合成后的分子包含所有顾客。如图4所示,A1中pos=4,若A22~9点的距离大于A1中2~5点的距离,则将顾客5放入新分子的位置2。合成反应的具体流程如图5所示。
3.5 碰撞反应
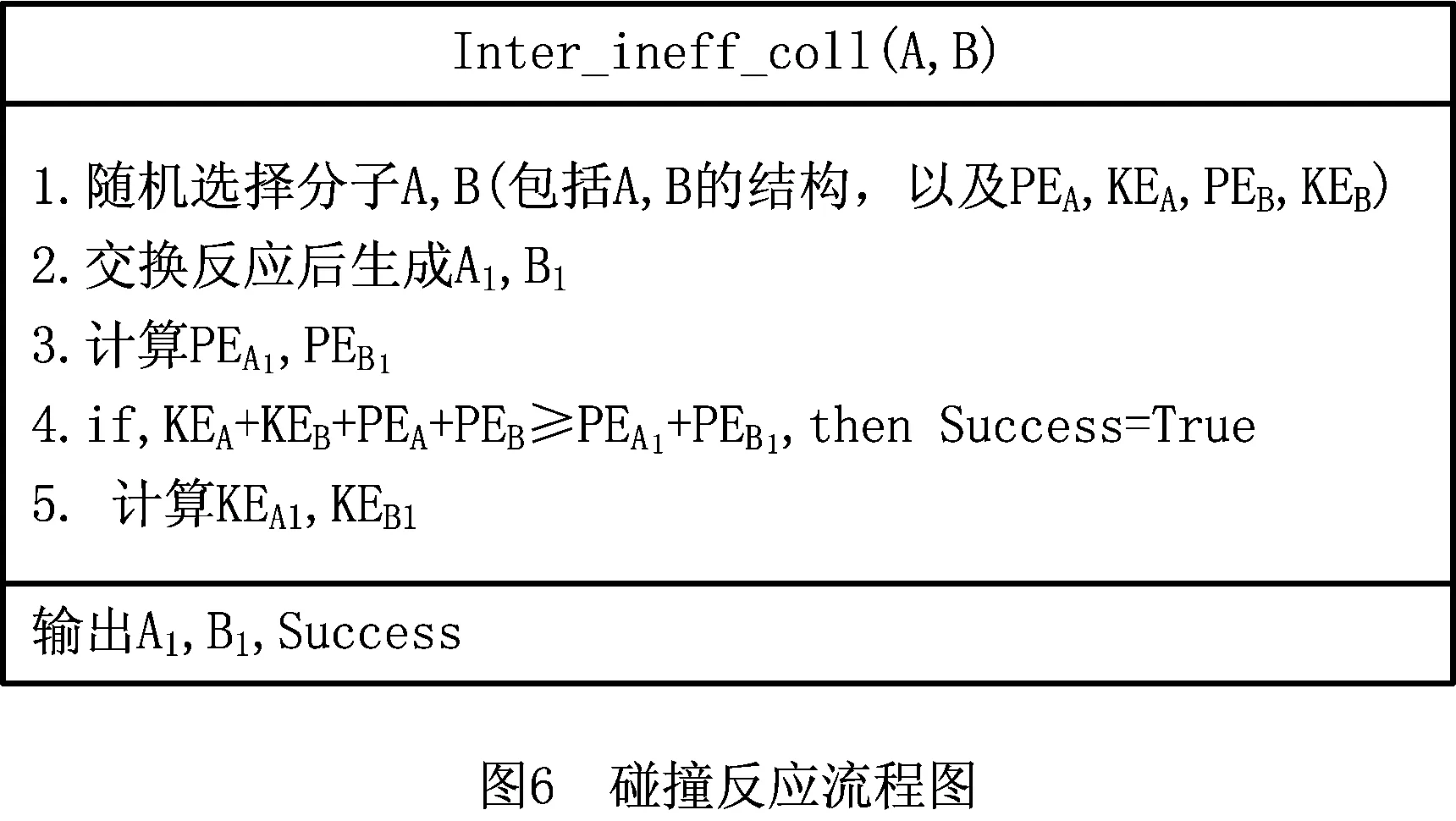
参考文献[40]的交叉方法随机选择两个不同的分子A和B,随机选择分子A的顾客点ai和分子B的顾客点bj(i=j),交换ai与bj后的顾客点,产生两个新分子,对新分子中重复的顾客点进行映射。当选择交换位置为4时,若交换前A,B分子分别为34825679和67534829,则交换后的分子A1和B1分别为34827569和67538249,碰撞反应的具体程序如图6所示。
3.6 算法流程
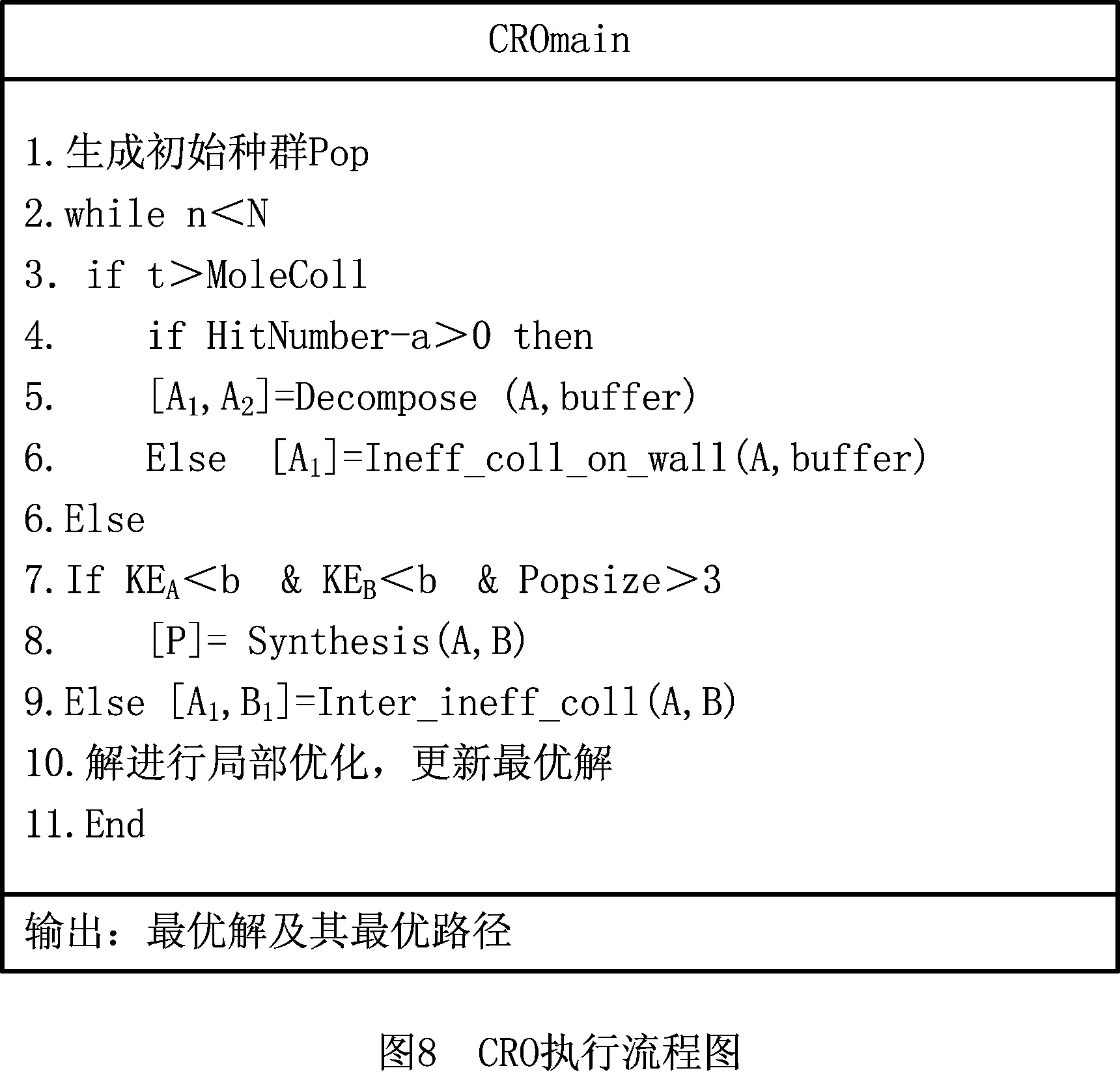
CRO求解CVRP问题的算法流程如图7所示。首先生成初始分子并计算其势能值,确定初始最小值,然后随机产生1个0~1均匀分布的t值,如果t大于预先设定的多分子反应概率MoleColl值,则执行双分子反应,否则执行单分子反应。对于单分子,将HitNumber与α进行比较,然后选择分解反应或撞墙反应;对于双分子,通过比较KE与β来选择相应的反应,具体执行过程如图8所示。

4 数据实验及分析
4.1 参数设置
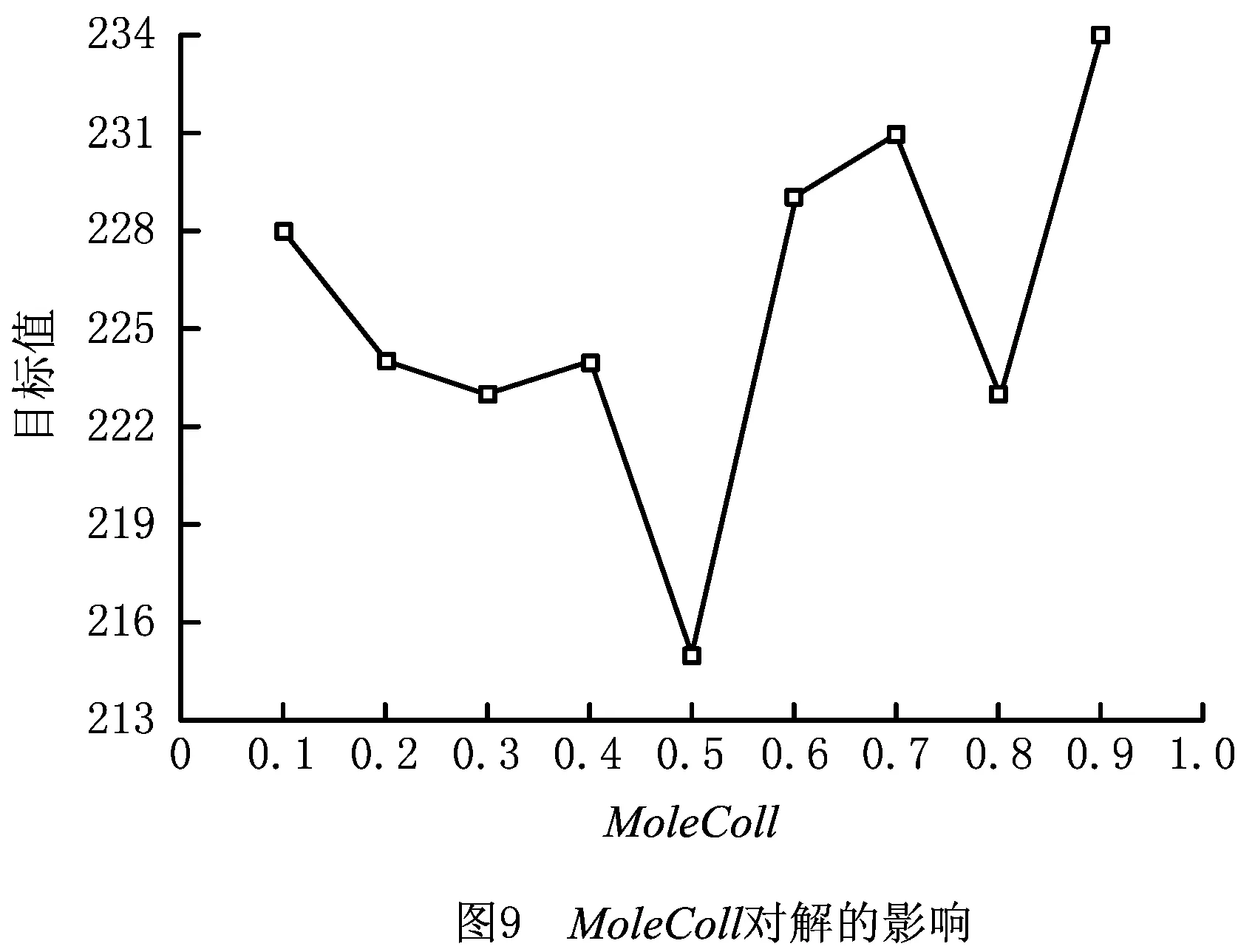
CRO算法的主要参数有:初始分子的个数Popsize,影响单双分子反应选择的MoleColl,初始动能InitialKE,合成、交换两种双分子反应控制参数β1,分解、撞墙单分子反应控制参数α1,最大迭代次数num。当MoleColl<0.5时,双分子反应权重增大,反之单分子反应权重较大。图9所示为对P-n19-k2案例MoleColl取值的10次模拟平均结果,由图可知,该案例中MoleColl=0.3,0.8时取得了相同的目标函数,即单双分子反应权重对解的影响没有明显差异,因此本文取MoleColl=0.5。
InitialKE是保证反应过程中能量守恒的参数,其设置过小易导致局域解[33];β控制合成、交换双分子反应的概率,其值越小,合成反应执行的几率越小,影响全局搜索,但如果过大,则碰撞反应的几率太小;α值影响分解、撞墙反应的发生概率,若α设置过大,则影响分解反应的发生概率,降低全局搜索,但过小又会影响碰撞反应的发生。本文按式(13)和式(14)设定α,β的值:
α=i/N×α1;
(13)
β=N/i×β1。
(14)
式中:N为总循环次数,i为当前循环次数,α1和β1为常数。
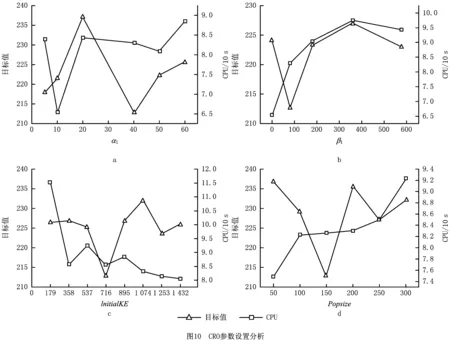
参考文献[33]的方法,设置初始参数α1=0,β1=0,InitialKE=179,Popsize=50,然后依次改变参数InitialKE,β1,Popsize,α1的取值。以P-n19-k2为测试案例,图10所示为参数取值与目标函数和CPU用时的关系。由图10a和图10b可知,α1,β1设置太大或太小均不能获得最佳解,说明几种反应的权重系数对求解结果的影响具有随机性,当α1=40,β1=80时解最小,其CPU用时的变化极小(不超过4 s);由图10c确定InitialKE=716;由图10 c确定InitialKE=716;由图10d种群与解及CPU的关系确定Popsize=150。
迭代次数越多,分子越能充分地在解空间进行搜索,分子间的信息交换越充分,越能搜索到更好的解。图11及表1所示为迭代次数与解的关系,表1第2列是P-n19-k2取上述参数随机运行10次的平均值,第3列是其平均CPU用时,图11所示为与表1对应的图。由图11可知,随着迭代次数的增大,解得到了改善,但当其增大到一定程度后(3 000代后),对优化结果的提升效果趋小,但其CPU用时却大幅提高。因此,本文在优化结果和计算时间之间寻求一个平衡,将最大代数设为3 000。
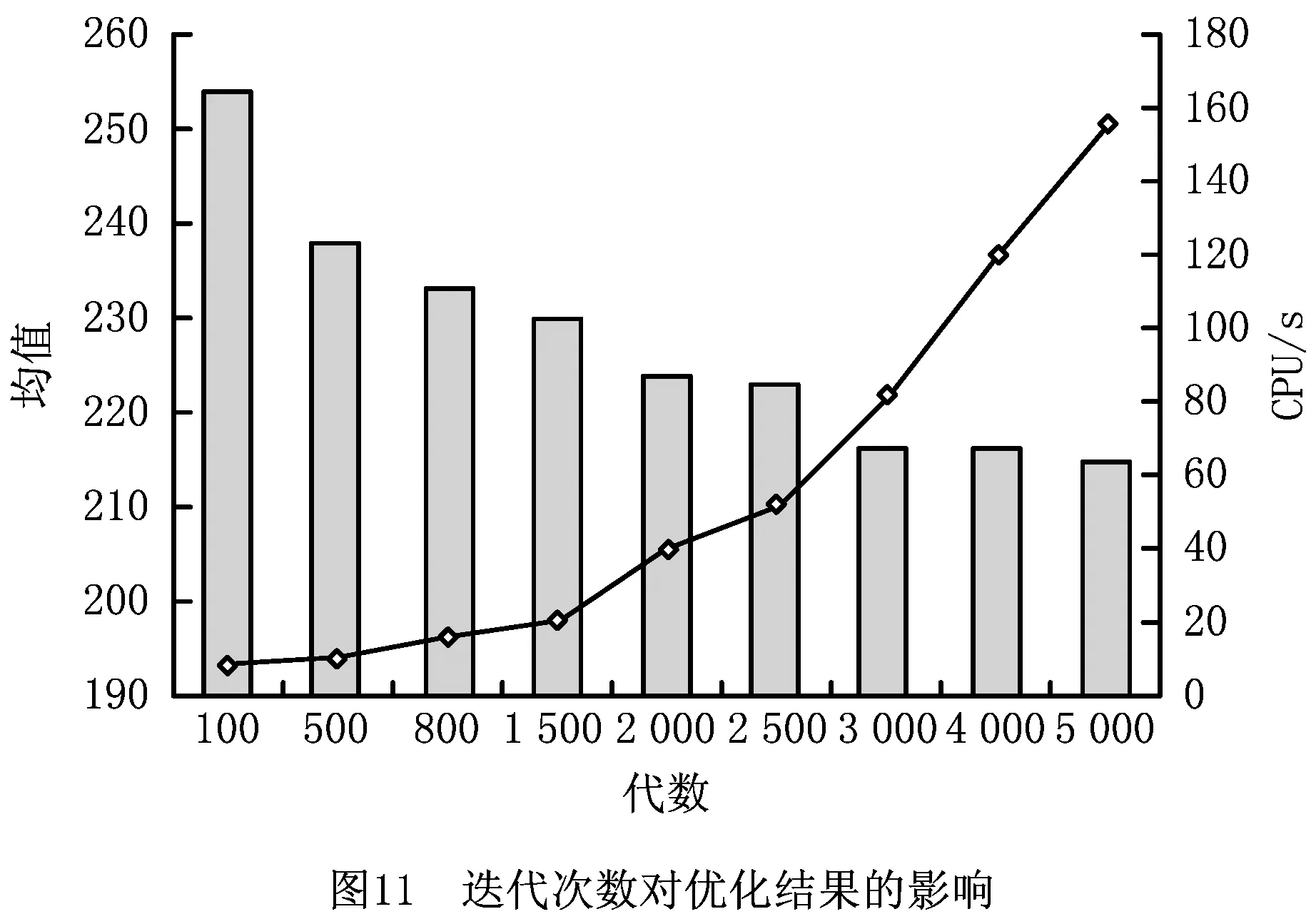
结合图10和图11的结果及后期大量的实验,本文参数设置如下:MoleColl=0.5,InitialKE=716,Popsize=150,α1=40,β1=80,num=3 000。

4.2 结果分析与比较
本次计算采用MATLAB 7.0编程,计算机的配置为Pentium(R)Dual-Core E5300 2.60 GHz CPU,8 GB RAM,每个案例计算10次,以最大循环次数为结束条件。为了测试算法的效果,将本文设计的CRO算法与标准库案例结果进行对比,标准库案例结果来自网址为http://www.bernabe.dorronsoro.es/vrp/的网站,数据采集的时间为2017年2月10日。表2所示为CRO算法的计算结果和标准库最优解的比较。其中:BKR为该标准库的最优解,Best为本算法求得的最佳解,Avg为平均值,第五列表示平均CPU用时,Dev为偏差。偏差的计算公式[25]如下:

由表2可知,在对标准库9个代表性的P,A案例求解中,CRO有4个案例取得了与标准库相同的最优解,占总案例(9个)45%,其他未获得最优解案例的偏差值绝大多数不超过5%。为了进一步验证CRO算法的求解效果,将其与文献[21]3种策略的大规模领域搜索(LNS)算法进行比较,比较结果如表3所示,表中:fbLNS,fwLNS分别表示不同策略LNS算法的最好解值和最差解值,fCRO表示本算法的最好解值;bRPD,wRPD表示本算法与LNS的最好解和最差解的相对差异百分比:
(16)
(17)
两种算法的CPU用时比较如表4所示。

表3 CRO与LNS结果比较
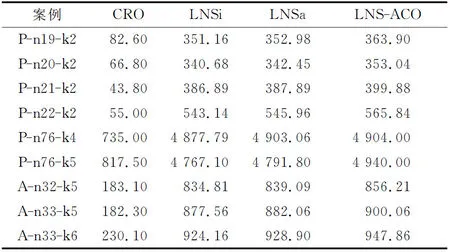
由表3可知,CRO算法在绝大多数案例中都取得了与LNS相同的最优解,部分结果优于LNSi,没有结果优于LNSa和LNS-ACO,但平均解偏差与LNSa和LNS-ACOCRO相比均不超过1%,与LNSi的平均结果相近,说明CRO算法具有较强的搜索能力。由表4可知,相比LNS算法,CRO算法的CPU用时在多个算例中减少近30%,因此CRO算法更适合于实时调度,将CRO与基于扩展节约法的集合覆盖算法(SetCovering Based Extended Savings Algorithm, SC-ESA)、粒子群优化(Particle Swarm Optimization, PSO)算法、带局部搜索的差分进化算法(Differential Evolution algorithm with Local Search, DELS)[19]几种常用算法进行对比,比较结果如表5所示,表中RPD为相对差异百分比,
(18)
式中:fCRO为本算法的最优解,fmin为其他算法的最优解。

表5 CRO与其他算法结果比较
由表5可知,CRO算法的9个案例中有2个案例的求解结果优于SC-ESA,总体结果与SC-ESA相近,略差于经典的PSO,DELS算法,但也有近50%的案例结果与PSO,DELS算法相同,平均解偏差不超过1.5%,因此证明CRO算法具有较强的搜索能力。


表6 CRO算子的实验结果
图12和图13所示分别为应用CRO算法得到的表2中案例2的线路图和收敛图。由图13的收敛图可知,算法初始阶段,由于α较小、β值较大,合成、分解反应发生的概率较高,目标函数值减小的幅度较大;随着迭代次数的增加,α逐步增大,β值逐步减小,合成、分解反应发生的概率降低,目标函数值降低的幅度变小。


5 结束语
本文将CRO算法应用于CVRP,主要进行了以下研究:
(1)将CRO算法的分子设计为反映顾客与配送中心序列的实数码,借鉴GA的交叉、变异和局部优化方法对CRO算法的撞墙、分解、合并和交换4个反应进行设计。具体为在撞墙反应中采用互换变异操作,分解反应中采用循环交叉操作,将单条路径分解为带有母体部分特征的两条路径,以扩大解的搜索范围;交换反应采用次序交叉操作,借鉴局部优化思想设计合成反应,在合成反应过程中获得局部路径最小解。
(2)采用动态方式设置CRO算法的两个重要参数α和β,将全局搜索与局部搜索有效结合,获得了较强的搜索能力。将求取的解与标准benchmark的6个P类和3个A类案例进行对比,结果显示CRO算法能够很好地求解CVRP,绝大多数结果与标准库的数据误差不超过5%,但其CPU用时减少幅度较大。随着实时配送对顾客满意度影响的增大,在不增加或少增加配送成本的基础上,增大配送实时性有助于提高顾客满意度,由此证明CRO算法是一种求解CVRP的有效算法。
下一步主要研究将CRO算法应用于带时间窗的车辆路径问题、动态车辆路径问题(Dynamic Vehicle Routing Problem, DVRP)等其他类型的VRP中,进一步拓展CRO算法的应用范围。
猜你喜欢
中国石油石化(2021年9期)2021-07-17 09:24:16
农村青少年科学探究(2020年5期)2020-08-18 02:20:52
作文周刊(中考版)(2020年27期)2020-08-14 10:14:00
少年漫画(艺术创想)(2019年11期)2019-04-20 06:46:40
新民周刊(2018年8期)2018-03-02 15:45:54
饮食科学(2017年12期)2018-01-02 09:23:20
莫愁·家教与成才(2017年1期)2017-01-13 18:02:19
山东青年(2016年1期)2016-02-28 14:25:27
爆笑show(2015年8期)2015-09-22 01:53:57
少儿科学周刊·少年版(2015年1期)2015-07-07 21:57:30
