基于智能小车的模块化教学系统设计
2018-09-04 12:42崔承毅王开宇高庆华
实验技术与管理 2018年8期
崔承毅, 王开宇, 高庆华, 李 赞, 王 林
(大连理工大学 电工电子实验中心, 辽宁 大连 116023)
随着科技的日益进步,社会对高校的素质教育提出了越来越高的要求,而实践教学是提高学生综合素质的重要环节[1-6]。智能小车是智能机器人的一种,可以辅助汽车自动驾驶的设计,完成危险环境的数据采集、图像传送,实施防爆、灭火等功能,涉及交通运输、军事、生活服务等众多领域,在现实生活中发挥着越来越重要的作用[7-8]。为了提高单片机综合设计课程的教学质量,针对电类高年级学生,设计了智能小车综合设计实验项目。智能小车具有蓝牙无线通信控制功能,可以通过手机APP发送无线控制命令,实现对小车的启动、停止、转弯、调速等控制,并设计了显示、循迹、语音等功能。
1 系统总体设计
基于单片机的智能小车框图如图1所示。上位机软件使用“蓝牙串口调试助手”等手机APP,通过蓝牙无线通信与下位机通信,下位机单片机采用STC公司生产的单时钟/机器周期(1T)的新一代8051单片机IAP15W4K58S4,该单片机片内集成8路PWM(Pulse Width Modulation,PWM),可以很方便地应用于小车调速控制[9-11]。

图1 智能小车系统框图
电机驱动采用电机驱动芯片L298N,驱动小车的左右2个直流电机;利用LCD来显示小车的运行状态信息;扩展部分可实现循迹、避障、语音等功能。
2 系统的硬件功能设计
2.1 电机驱动
电机驱动使用专用电机驱动芯片L298N,其典型电路如图2所示。L298N内部设有2路驱动电路,可以分别驱动小车的左、右2个轮子。单片机通过IN1、IN2控制小车的左轮电机,通过IN3、IN4控制右轮电机。前进时,单片机发送PWM波控制2路电机以相同速度向前运行;改变2路电机的转向实现小车的后退;当2路PWM波频率不同时,可以实现小车的转弯;同时改变2路PWM波的占空比可以控制小车的速度[12]。

图2 L298N电机驱动电路图
2.2 蓝牙无线通信
智能小车与手机APP进行蓝牙无线通信,采用HC-05蓝牙串口通信模块来实现。其工作模式有命令响应模式和自动连接模式。模块工作于命令响应模式时,用户可以向模块发送AT指令为模块设置名称、密码、波特率、工作模式等参数。模块在自动连接工作模式下又可分为主(master)、从(slave)和回环(loopback)3种工作方式。在本系统中,蓝牙模块工作在从模式,当手机蓝牙与HC05模块配对成功以后,HC05模块当全双工串口使用,单片机通过串口接收手机发送的命令来实现对小车的控制,蓝牙模块与单片机串口2的连接如图3所示。

图3 蓝牙模块与单片机连接示意图
2.3 显示功能
显示功能是电子系统的重要组成部分,用户可以根据当前的显示内容,得到设备的运行状态。学生在设计过程中,显示模块可以选择LCD1602或LCD12864,显示内容可以是学生的班级、姓名及小车运行状态、参数等信息,由学生自主设计。学生设计的LCD12864显示内容如图4所示。

图4 LCD12864状态信息显示
2.4 语音功能
语音功能使得电子产品更加人性化、便捷化,在许多应用领域都有着不可替代的作用。学生在设计语音功能时,可在小车运行过程中增加各种音效,如在倒车的时候发出:“倒车请注意”或者“滴!滴!滴!”等。
语音功能使用基于ISD1820的语音模块来实现,其典型应用电路如图5所示。ISD1820芯片具有录音、播放功能,语音播放可使用边沿或电平触发方式,可通过改变ROSC采样电阻的阻值调整录音时间,采样时间为8~20 s,时间越短音质越好[13]。

图5 ISD1820典型电路图
2.5 循迹功能
红外循迹模块采用红外对管方式,通过对循迹黑线进行探测,进而实现循迹功能[14-15]。红外对管的典型应用电路如图6所示。

图6 红外对管的典型电路图
因为循迹黑线能有效吸收红外光,当红外发光二级管位于黑线上方时,其发出的光被黑色吸收,接收端光电三极管的基级无法接收到反射光,三极管不导通,因此比较器的反向输入端为低电平,低于同相端电压,比较器输出高电平;反之,当红外发光二级管没有位于黑线上方时,发射光被反射回来,光电三级管导通,比较器反向端输入的是高电平,高于同相端电压,比较器输出低电平。
单片机通过比较器的输出,判断红外探测对管是否位于循迹线上。在设计循迹功能时,一般使用3路红外对管,中间1路探测黑线,左右2路判断是否在黑线之外,单片机通过综合3路红外对管的探测情况来控制小车的路线,从而实现循迹功能。
2.6 超声波避障
利用超声波测距功能,可以实现小车躲避障碍物的功能。超声波模块使用HC-SR04模块,模块包括超声波发射器、接收器及控制电路,其接口包括VCC、GND、TRIG、ECHO 4个端口,与单片机连线如图7所示。

图7 超声波模块与单片机连接示意图
当测距时,单片机通过P3.5发送至少10 uS的高电平信号到TRIG,触发测距;超声波模块收到触发信号后,自动发送8个40 kHz的方波,并检测返回信号;当有信号返回时,通过端口ECHO返回P3.6引脚一个高电平,高电平的持续时间就是超声波从发送到返回的时间。其工作过程如图8所示。
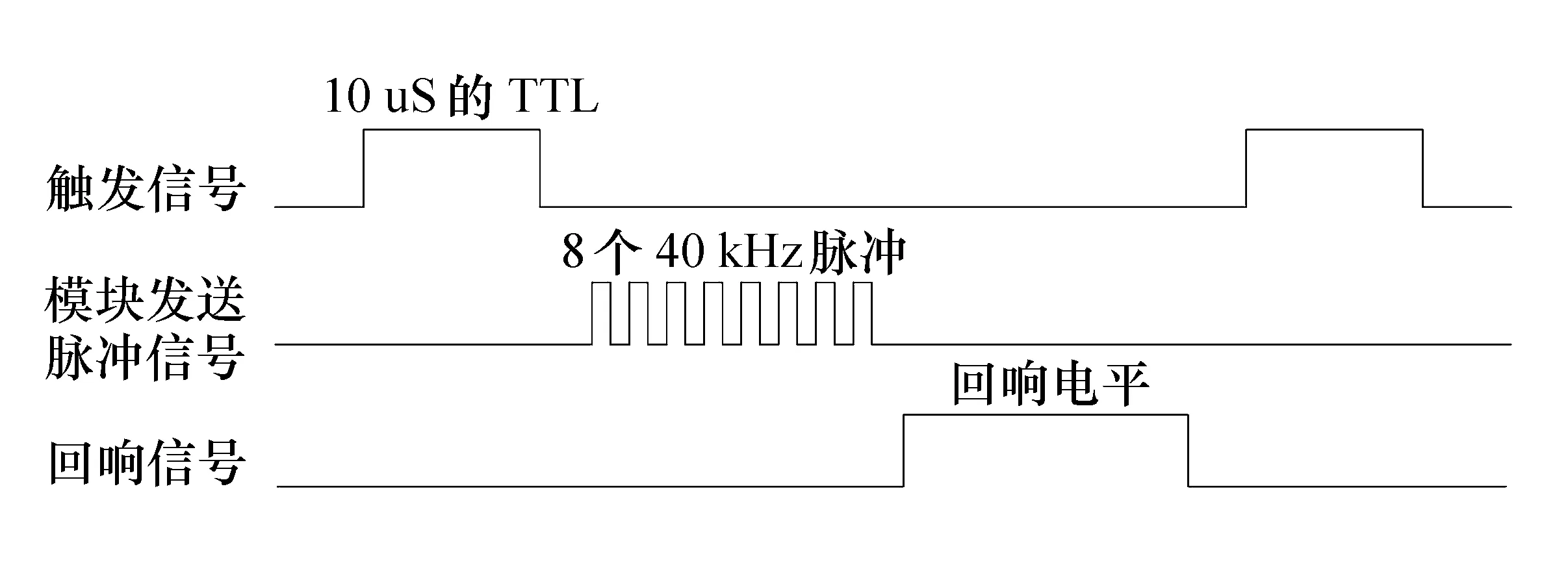
图8 超声波模块工作过程
通过测量发射信号到收到回响信号的时间间隔,可以得到测距公式为:
S测得距离=(T高电平持续时间*340 m/s)/2
(1)
为了防止发射信号对回响信号的影响,测量周期应为60 ms 以上。
3 智能小车在实践教学中的应用
实验要求学生一人一组,在48学时内设计蓝牙智能小车系统。实验教学过程中,硬件功能模块化,实验内容层次化。
3.1 模块化的功能设计
实验教学过程中,将系统中的各功能单元模块化,让学生自由组合,学生可以像搭积木一样进行硬件电路的功能扩展,从而设计实现功能丰富、完善的电子应用系统。这种实践教学方法脱离了传统实验箱的束缚,学生可以根据自己的能力、兴趣等进行系统的功能设计和拓展,充分发挥学生自主性和能动性。实验教学过程中,为学生提供的硬件模块有电机驱动模块、蓝牙无线通信模块,LCD模块、语音模块、超声波模块及红外循迹模块等。
3.2 层次化实验教学
为了使不同能力的学生都得到很好的锻炼,实验将项目分为基本功能和拓展功能2部分。基本功能要求使用手机APP控制小车的前进、后退、转弯、调速,具有LCD显示功能,保证大多数学生都能够完成,使学生动手能力得到有效的锻炼;感兴趣、有能力的学生可以在此基础上,设计避障、循迹、语音等扩展功能,充分发挥学生的特长,锻炼学生的创新实践能力。为了满足学生拓展功能设计需求,允许学生延长实验时间来设计实现功能丰富的作品。
3.3 实验教学效果
智能小车实验项目趣味性强,可拓展功能多,特别适合锻炼学生的动手能力和工程实践能力。实验中,学生实验兴趣较高,各尽所能,设计的作品多种多样,取得了良好的实验效果,部分学生作品如图9所示。

图9 部分学生作品
学生的拓展功能设计如图10—12所示,包括超声波避障、语音功能、自制PCB、自编APP程序、红外循迹等拓展功能的设计。

图10 增加了超声波避障、语音功能的智能小车

图11 自制PCB、自编APP的智能小车

图12 循迹、超声波避障、语音功能的小车
4 结语
智能小车在综合实训和创新实践等教学环节中广泛应用,该项目涵盖的知识点多,软硬件相结合,适合锻炼学生对单片机、模电、数电、传感器、无线通信等知识的综合运用。在实践教学中,智能小车采用模块化的设计方式,为学生提供充分的自主发挥空间,较好地调动了学生实验的主动性和积极性,并针对学生能力不同的特点,层次化实践教学内容,使每位学生的锻炼效果最大化。实验中,学生的兴趣较高、主动性强,实验教学质量得到了一定的提升。
猜你喜欢
工业设计(2022年7期)2022-08-12
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
家庭影院技术(2018年10期)2018-11-02
电子制作(2018年8期)2018-06-26
家庭影院技术(2018年3期)2018-05-09
电子制作(2017年1期)2017-05-17
玩具世界(2017年8期)2017-02-06