轮履复合式机器人实验平台设计与研究
2018-09-04 12:40唐义文李恩鹏
实验技术与管理 2018年8期
王 军, 唐义文, 李恩鹏
(中国矿业大学 信息与控制工程学院, 江苏 徐州 221116)
轮履复合式机器人实验平台与传统轮式机器人相比,具有更高的灵活性和越障能力,其实验平台中的图像采集和图像显示单元提供了第一人称视角的实时现场图像,可以得到某些危险场合最直观的场景。轮履复合式机器人实验平台提供了一个完全开放的机器人开发平台,其主控系统通过CAN总线、USB总线,以及串口等多种协议与外界进行信息交互,用户可通过挂载不同传感器和机械臂实现不同的功能从而实现二次开发。轮履复合机器人实验平台是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合型智能系统,涉及机械设计技术、机器人技术、自动控制原理、传感技术、嵌入式系统设计、图像处理技术等众多学科知识的学习和综合应用,是机械和自动化专业学生开展机器人相关课程学习和创新性实践的良好平台[1]
1 轮履复合机器人运动平台的综合设计
轮履复合机器人实验平台是机械结构部分、动力部分、传感器与智能控制部分三者的有机结合。首先利用计算机辅助工具设计了轮履复合式机器人机械结构并进行了机械框架试制;之后依照机械结构分别设计了基于CAN总线控制的步进电机和直流电机的智能驱动器;最后在既定的机械结构和动力单元的基础上设计了以工控机为主控制器的控制单元,三者相辅相成。利用实验样机分析了其运动模式和运动特性,防爆设计进一步扩展了其应用领域,能够满足工业现场和教学的需求。
2 轮履复合机器人实验平台的机械结构
在对轮履复合机器人实验平台进行具体机械结构设计之前,首先确定轮履复合机器人实验平台的工作要求,这样在对轮履复合机器人实验平台进行机械结构设计时才更具有针对性。轮履复合式机器人实验平台在机械方面的要求有[2-4]:
(1) 能够越过环境中经常遇到的台阶、间隙、崎岖路等障碍物;
(2) 能够在平地高效率的移动;
(3) 能够在很小的半径内或者原地转向;
(4) 体积小、重量轻、可靠性好。
Solidworks是三维实体模型计算机辅助设计软件,具有强大的绘图和仿真功能。根据以上对轮履复合机器人实验平台的要求,本设计利用Solidworks软件作为工具设计出机械结构草图,然后建立各个零件的模型,最后利用装配工具进行整机装配并进行动态仿真。机器人机械原理图和机器人装配效果图见图1。

图1 机器人机械原理图和机器人装配效果图
机器人的车体采用合金型材料制作的桁架结构,内部留有充足的空间用以安装电气控制设备和电池等。履带驱动电机和变形控制电机采用自制的电机座紧贴车体安装,使结构进一步紧凑,在减小尺寸的同时也提高了空间利用率。轮履复合式的构造给机器人提供了多种运动模式,与同等大小的单一机械结构形式机器人相比,其运动更加灵活,越障能力进一步提高。轮式运动、履带运动、上斜坡运动、下斜坡运动分别如图2所示。
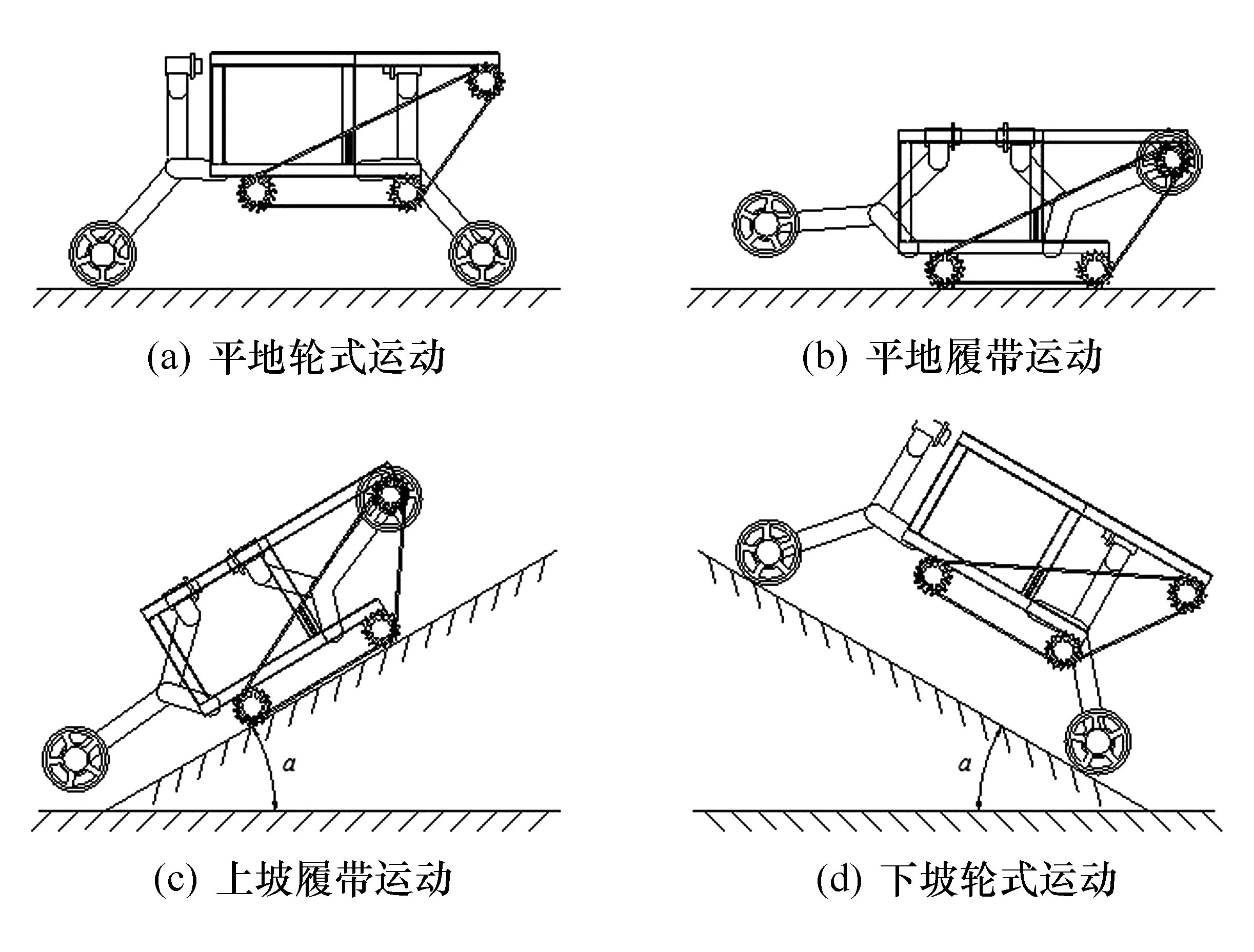
图2 运动模式
4种运动模式各有特点,在具体应用背景中,轮式运动仍然是最主要的运动形式,但是履带运动模式所提供的越障功能也是必不可少的,机器人越障实验如图3所示。
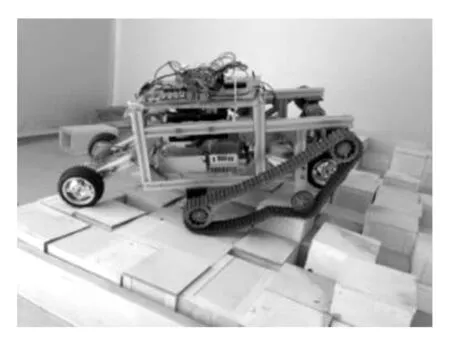
图3 机器人越障实验
3 轮履复合机器人实验平台的动力单元
在本轮履复合机器人实验平台设计中,无论是轮式运动、履带运动或者变形运动都选择电机作为执行单元,其基本结构是由4个电机驱动的轮式运动机构、两条履带运动机构和4套轮式运动机构摆臂装置构成的复合结构。轮式运动主要应用在较为平坦的地形,只要电机参数相差不是太大即可正常工作,选择直流有刷电机;摇臂要求驱动电机具有锁止功能,因此选择步进电机才能保证轮履复合机器人在变形过程中得到精确控制;履带驱动为旋转运动,可选择的电机相对较多,为简单起见,也选择直流有刷电机。
根据设计要求,直流电机驱动器需要兼容步进电机智能控制器的相关协议和控制方法,从而使得直流电机驱动器也可以挂在CAN总线上实现总线式的分布控制[5-7]。直流电机驱动主电路采用以MOSFET为开关器件的H桥,其具有成本低、耐压耐流程度高、散热设计方便、内阻小、开关速度快等诸多优点。由单片机控制发出两路互补的PWM波形,用双极性PWM方法控制电机转速的优点是双极性PWM可以使得电机产生高频震颤,有效减小其静态摩擦。在H桥的低端位置使用了BACK-EMF转速测量方法。用于直流电机智能驱动器硬件具体结构框图见图4。对于步进电机,本设计采用日本东芝半导体公司生产的TB6560步进电机驱动芯片来驱动。

图4 直流电机智能驱动器硬件结构框图
为了说明双极性互补PWM波的实际效果,利用示波器测试了下桥臂的驱动信号,结果见图5。由图5可知,上升沿和下降沿时间短暂,开关管开关迅速,满足实际应用的需要。

图5 直流电机驱动器开关速度波形
机器人平台使用两套由直流有刷电机驱动的运动系统,当两套运动系统做直线运动时,开环的速度控制将使得机器人在不同地形上保持相同运动速度的能力变差,对电机转速进行精准控制就显得非常有必要。为了改善机器人的运动性能,本设计中对其电机的转速进行闭环控制,其中PID控制选用数字位置式的PID控制器。直流电机转速控制流程图见图6。
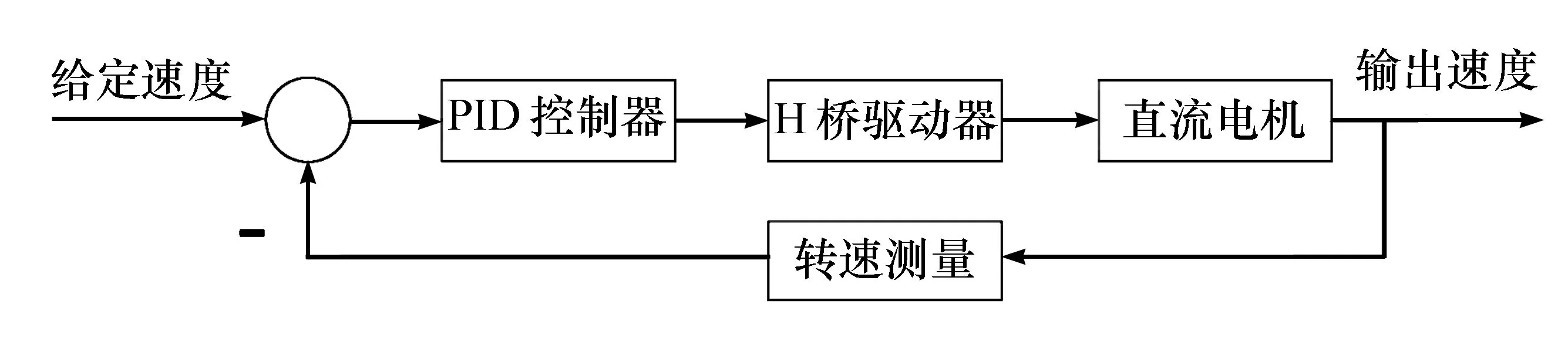
图6 直流电机转速控制流程图
4 轮履复合机器人实验平台的智能控制系统
4.1 轮履复合机器人实验平台控制箱设计
机器人平台需要强大的主控系统来控制所有部件、协调各传感器、记录各项数据等,因此需要一个总的控制单元。由于工控机性能配置与PC相当,操作系统也属于常见的操作系统,其底层驱动十分齐全且丰富,PC机上能用的外设,工控机上也能用,这一特点大大拓展了其外设的扩展能力,所以本设计中选择工控机作为主控设备。工控机可以提供几乎任何USB设备、串口设备的驱动,使得开发变得非常简洁。例如控制器需要驱动CAN总线上的智能设备,只需要采购一个USB转CAN的小设备即可轻松完成总线连接,同时根据其驱动程序即可快速接入主程序,实现智能控制器的驱动。机器人控制箱的整体框图见图7。
4.2 轮履复合机器人实验平台的遥控系统设计
本设计中的机器人虽然具有自主移动的功能,但在某些复杂环境中还可以根据具体情况使用手动遥控功能。手动遥控操作的主要操作对象是机器人的运动机构,主要包括轮式运动、履带运动和摇臂升降的遥控。为了能够在超视距范围内更好地操作机器人,本设计采用OSD(on screen display)技术设计图像回传系统。 OSD技术常用于显示器的简易选单操作[8-9],这种技术优势在于可以充分利用视频通信信道,使得视频信号在几乎不受影响的情况下,叠加上机器人是否在上坡、是否发生了侧倾、速度如何等状态信息,从而节约宝贵的通信资源,因此OSD叠加功能的使用将使得机器人的超视距遥控大大简化。此外,GPS定位系统的应用使用户可以获得更加精准的机器人位置信息,用户通过第一人称视角获得机器人的状态和位置信息,遥控完成相应操作,图8为遥控和图传系统。

图7 控制箱框图

图8 OSD叠加视频、遥控器和图传系统图
4.3 轮履复合机器人实验平台的自主移动
轮履复合机器人实验平台行进引导方法有很多种,如光学导引、磁带导引、惯性导航引导、机器视觉导引等,本文采用磁带导引对机器人平台的实用性进行实验验证。要达到对机器人的精确控制,除了要知道机器人发生位置偏移外,还要检测到机器人机身相对于引导线发生的角度偏移量,所以在机器人前部和后部都安装了磁传感器。
下面以执行危险地域巡航任务为例简述轮履复合机器人实验平台巡检的控制过程,巡检流程图见图9。在此任务中轮履复合机器人的首要目标就是能够按照既定路线行走,主要包含路径识别、路径跟踪、偏差矫正、角度矫正、启停控制等[10-12]。由于机器人的导引控制系统参数众多、结构繁杂、其动态难以测量、参数复杂多变,同时其扰动变量也是复杂多变的,如地面平整度、摩擦系数、电机控制的精度等,无法建立精准的控制模型,传统的控制方法已无法使用,因此选择模糊控制。模糊控制器的基本结构如图10所示。
设计模糊控制器主要包括将输入量模糊化、建立专家知识规则库、利用模糊推理单元进行决策逻辑、将输出量去模糊化后输出[13]。通过对机器人实际运行情况的分析,以及在对其进行多次遥控操作并对操作手感进行总结的基础上,建立专家规则库,结合位置偏差和角度偏差,设计的模糊规则库见表1。
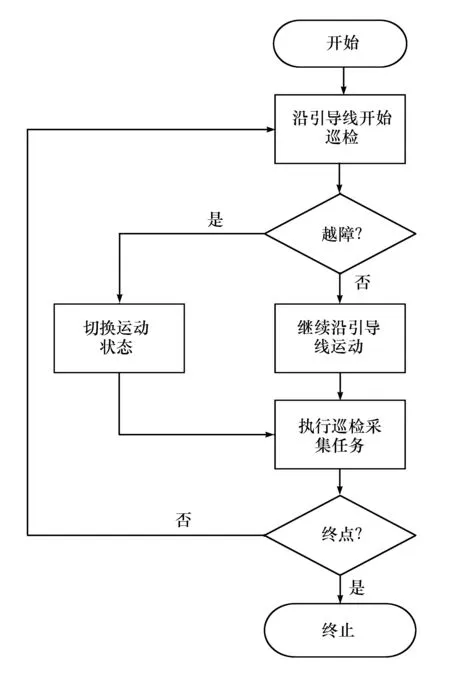
图9 机器人巡检流程图

图10 模糊控制器基本结构表1 模糊规则库

编号位置偏差位置偏差变化率左运动系统动作右运动系统动作1严重右偏忽略高速2中等右偏减小中速3中等右偏无变化中速4中等右偏增大高速5微右偏减小中速6微右偏不变慢速7微右偏增大中速8正常忽略等速等速9微左偏减小中速10微左偏无变化慢速11微左偏增大中速12中等左偏减小中速13中等左偏无变化中速14中等左偏增大高速15严重左偏忽略高速
模糊控制器中的输出量仍然是模糊量,所以要先去模糊化才能作用于执行机构。去模糊化的方法很多,本设计采用加权平均法进行解模糊。
5 总结
本文设计了一款灵活度高、越障能力强、扩展性好的通用型轮履复合式机器人实验平台,其具备第一人称视角的遥控功能与强大的环境自适应能力使机器人能够在更复杂的环境中完成艰难的工作,例如可以在紧急情况下深入曲折巷道执行巡检、救灾、监测等任务。同时,由于轮履复合式机器人平台的设计涉及众多学科知识的学习和综合应用,作为实验平台可以培养学生的独立思考和显著提高学生的动手实践的能力。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
电子制作(2017年1期)2017-05-17
通信电源技术(2016年1期)2016-04-16
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28