基于MODIS热红外波段与投影寻踪模型的水汽反演方法
2018-09-04 09:47林奕桐叶骏菲王永前钟仕全
自然资源遥感 2018年3期
林奕桐, 叶骏菲, 王永前, 钟仕全
(1.南宁市气象局,南宁 530022; 2.邕宁区气象局,南宁 530022; 3.成都信息工程大学,成都 610225;4.广西壮族自治区气象减灾研究所/国家卫星中心遥感应用实验基地,南宁 530022)
0 引言
大气水汽含量及其变化是天气和气候的主要驱动力[1],传统的水汽含量需要通过探空获取,但对于边远地区,获取探空资料非常困难,因此使用遥感手段获取大气水汽含量十分重要[2]。遥感水汽产品已经获得了广泛的应用,例如局地暴雨预报[3]、人工增雨指导[4]和天气系统移动过程分析[5]等。
MODIS是搭载于美国发射的太阳同步轨道系列卫星TERRA和AQUA上的主要传感器,它具有36个光谱通道,分布在0.4~14 μm的电磁波谱范围内。常用的MODIS水汽产品为近红外和热红外水汽产品。与热红外方法相比,近红外方法具有较高的反演精度。但是近红外水汽反演方法仅适用于白天,相比之下,能实现白天夜晚双时段观测的热红外水汽数据更适合业务应用。因此,提高热红外水汽反演结果的精度,有着非常重要的意义。
传统的热红外水汽反演方法是利用迭代回归得到大气湿度廓线,将其积分,得到水汽含量,在MODIS业务化水汽产品中,也常用到分裂窗算法[6-7]。学者对此已开展过研究。Chang等[8]对比了美国南加利福尼亚的MODIS热红外水汽产品数据和GPS水汽数据,均方根误差(root mean square error,RMSE)为4.07 mm; Liu等[9]对比了中国2012年全年的MODIS热红外水汽产品数据和探空水汽数据,白天RMSE为6.02 mm,夜晚RMSE为5.81 mm。
传统的热红外水汽反演方法很大程度上依赖于最初选择的温湿廓线,当地表温度与边界温度比较接近时,结果会有较大的误差[10],且该方法对区域水汽空间分布和下垫面情况的要求较为苛刻[11]。而投影寻踪模型是一种集主成分分析、特征提取和数据压缩为一体的综合分析技术,具有稳健性、抗干扰性和准确度高等优点[12]。因此,本文尝试通过MODIS热红外数据结合投影寻踪模型进行大气水汽含量的反演。
1 研究区概况及数据源
本文选择的研究区域为美国南部地区及中国山西省。美国南部地区属亚热带气候区,夏季较为炎热,冬季温暖,全年降水充足; 山西省属于温带大陆性季风气候,夏季南长北短,雨水集中,冬季漫长,寒冷干燥。文中采用MODIS数据进行研究。其中使用MOD02数据进行亮温反演,并代入投影寻踪模型进行水汽反演,使用MOD05数据进行对比。MOD02即MODIS_L1B数据,是MODIS原始数据经过辐射校正后的产品,MOD05是MODIS的水汽产品,其中包括了热红外和近红外2种。
水汽反演结果的验证数据及投影寻踪模型的学习数据为SuomiNet实验测得的全球定位系统(global positioning system,GPS)水汽数据和北京市城市气象研究所提供的GPS水汽数据。SuomiNet是由美国国家科学基金会资助,通过相关高校之间的合作建立的实时GPS地基观测网络,用于大气科学研究[13]。其在北美分布有近300个监测站点,每个站点利用GPS信号进行大气水汽反演,时间分辨率为0.5 h,在每小时的15分和45分进行监测。中国华北地区建立了较为完整的地基GPS观测网,中国气象局北京城市气象研究所实现了华北地区地基GPS观测资料的实时解算,数据时间分辨率为0.5 h。本文利用了山西省境内的59个GPS站点观测的水汽数据。
2 基本原理
2.1 热红外分裂窗反演水汽的基本原理
水汽对10.8 μm和12 μm波长辐射的吸收有差异,因此,可以利用分裂窗算法对这2个波段进行计算,从而得出水汽含量[14]。当地表及大气发射率为常数,或空间变化较小时,辐射亮度的空间变化可以表示为[15]
(1)

对普朗克公式进行一阶泰勒展开,可以得到

(2)
结合公式(2)对公式(1)进行化简,并用最小二乘法分析,可得到2通道透过率的比值形式,即
(3)
式中τj和τi分别为2个热红外通道i和j的透过率。


2.2 投影寻踪的基本原理
投影寻踪算法的基本思想是把高维数据通过某种组合投影到低维子空间上,对于投影到的构形,采用投影指标函数来衡量投影暴露某种结构的可能性大小,寻找出使投影指标函数达到最优(即能反映高维数据结构或特征)的投影值,根据该投影值分析高维数据的结构特征[17-18]。将投影寻踪与回归分析相结合,则形成投影寻踪回归(projection pursuit regression,PPR)分析技术,其实现方法如下[19]:
设x是p维随机变量,y=f(x)是一维随机变量,为了避免线性回归不能反映实际非线性情况的矛盾,PPR用式(4)表示的一系列岭函数Gm(Zm)的“和”去逼近回归函数f(x),即
(4)

式(4)可以写成矩阵表示形式,即
(5)
李祚泳等[19]采用了易于实现的免疫进化算法(immune evolutionary algorithm,IEA)优化PPR模型中的参数。因此,PPR的参数优化问题即是在满足目标极小化准则条件下,采用IEA优化式(5)中的参数矩阵{βm}1×M和{βmj}M×p(m=1,2,…,M;j=1,2,…,p)的问题。
2.3 投影寻踪模型用于水汽反演的步骤


(6)

3)抽取其余的自变量作为检验样本代入训练后的投影寻踪模型,得到的结果与相对应的WGPS数据作比较,并计算其误差。
3 结果与讨论
3.1 投影寻踪模型代入变量的选取



图及WGPS的归一化统计Fig.1 Normalization and WGPS
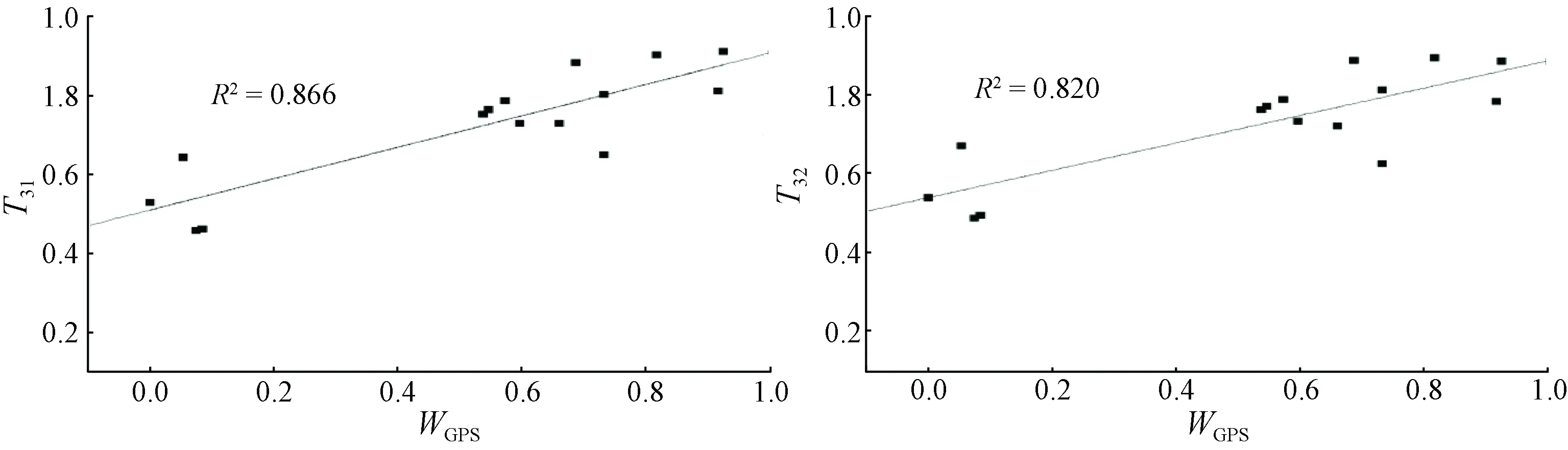
(a)T31与WGPS的关系 (b)T32与WGPS的关系


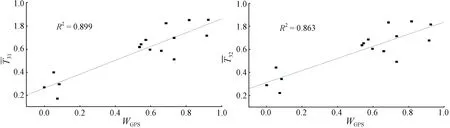

3.1.2WGPS与亮温的四则运算之间的关系
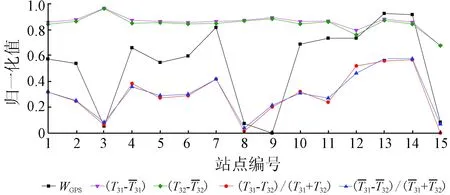
图3 部分亮温四则运算及WGPS的归一化统计Fig.3 Normalization of arithmetie of brightness temperature and WGPS
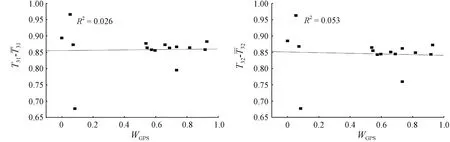

图4WGPS与部分亮温四则运算的线性关系
Fig.4LinearrelationshipbetweenarithmetieofbrightnesstemperatureandWGPS
3.2 结果对比实验
本实验的目的在于测试各类代入变量,选取最优的变量组合。变量组合应满足以下2个条件:
2)变量两两之间不能有重复因子,否则会影响模型对权重系数β的判断。
结合SuomiNet提供的站点经纬度坐标,在2015年8月6日美国南部地区的遥感影像上可以找到相应的59个样本点。从中随机选取50组作为训练样本,每组训练样本均包含输入变量和WGPS。其中输入变量是自变量,来自于遥感影像;WGPS是因变量,来自于SuomiNet网站。将训练样本代入投影寻踪模型进行学习训练。另外9组样本作为反演样本,仅将自变量代入模型,让模型自行反演WGPS。
为了方便与传统的模型相比较,实验下载了对应时间的MOD05热红外水汽数据,并从中选取了与9组反演样本相对应的像元点,参与比较(图5)。

图5 美国南部地区水汽反演结果与WGPS对比Fig.5 Comparison between the inversion results of water vaporwith WGPS in the southern United States
由图5可以看出,4组输入变量代入模型后反演的水汽结果和MODIS热红外水汽含量数据均能将WGPS的趋势较好地模拟出来,其中,MODIS热红外水汽产品与WGPS的RMSE为4.014 mm,W1与WGPS的RMSE为5.881 mm,W2与WGPS的RMSE为2.171 mm,W3与WGPS的RMSE为2.889 mm,W4的RMSE为2.990 mm。
根据中国山西省GPS观测站点的地理坐标,在2011年7月27日的遥感影像上可以找到相应的51个样本点,从中随机选取42组作为训练样本,9组作为反演样本,采用与美国南部地区相同的方法进行实验,结果如图6所示。
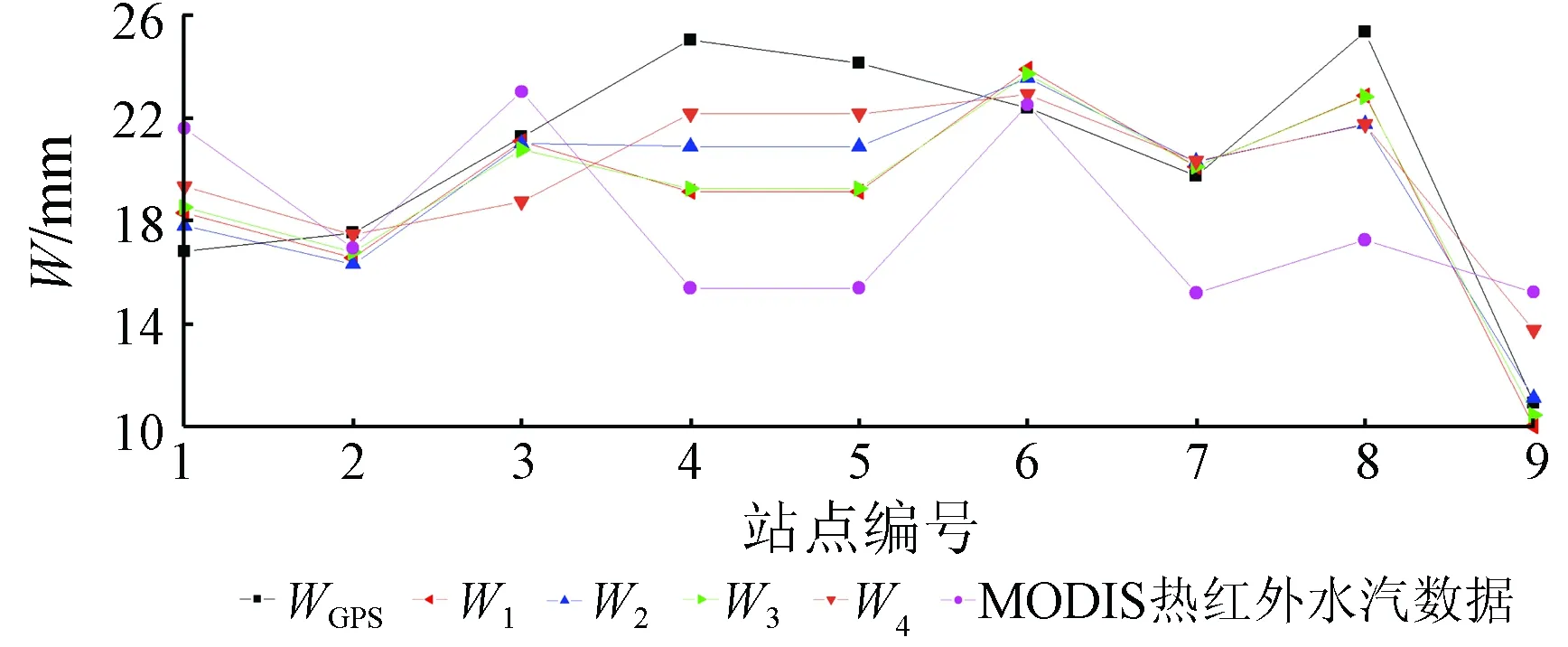
图6 中国山西省水汽反演结果与WGPS对比Fig.6 Comparison between the inversion results of water vaporwith WGPS in Shanxi Province of China
山西省实验中MODIS热红外水汽产品与WGPS的RMSE为3.361 mm,W1,W2,W3,W4与WGPS的RMSE分别为1.480 mm,1.210 mm,1.442 mm和1.381 mm。
美国南部地区试验结果中,W1的误差最大,大于MODIS热红外水汽数据的误差,而W2,W3和W4误差均小于MODIS热红外水汽数据的误差。从山西省实验结果上看,4种变量组合反演精度总体相差不大,均小于MODIS热红外水汽数据的误差。
3.3 投影寻踪模型反演实验
为了验证投影寻踪模型反演水汽的可推广性,本文对美国南部地区及中国山西省分别做了水汽反演实验。
3.3.1 美国南部地区水汽反演实验
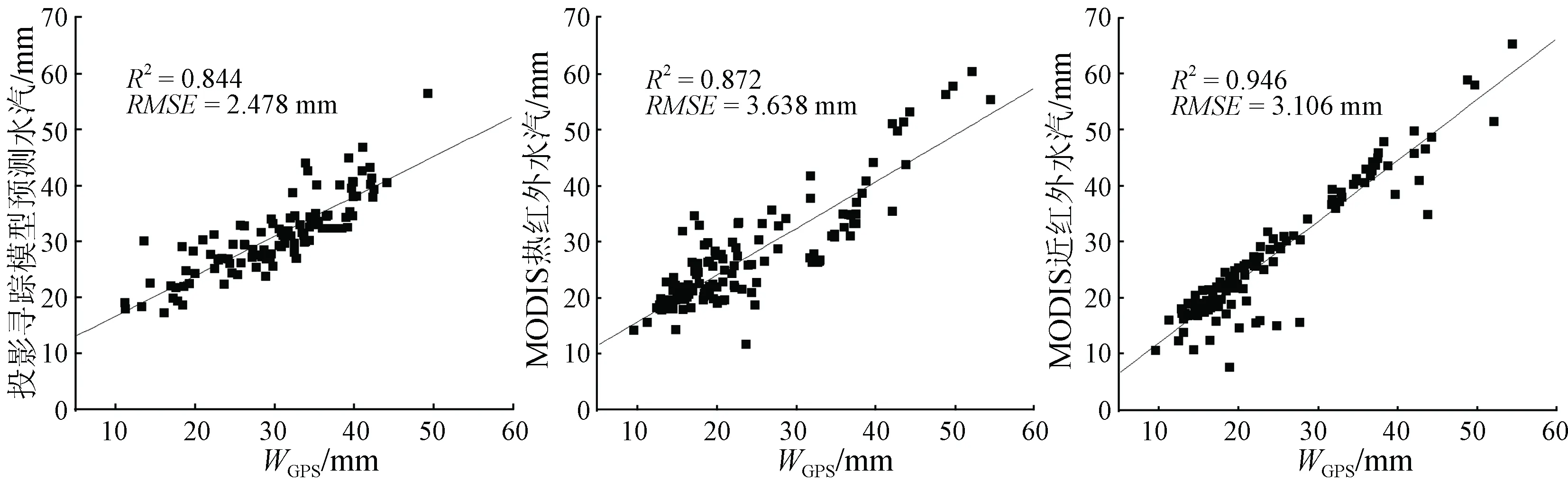
(a)WGPS与投影寻踪模型预测水汽的相关性 (b)WGPS与MODIS热红外水汽的相关性 (c)WGPS与MODIS近红外水汽的相关性
图73组模型水汽反演结果与WGPS的相关性分析
Fig.7ComparisonbetweeninversionresultsofwatervaporinthreegroupswithWGPS
3.3.2 中国山西省水汽反演实验
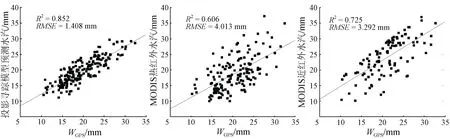
(a)WGPS与投影寻踪模型预测水汽相关性 (b)WGPS与MODIS热红外水汽相关性(c)WGPS与MODIS近红外水汽相关性
图8投影寻踪模型水汽反演结果与WGPS的相关性分析
Fig.8ComparisonbetweenthePPRinversionresultsofwatervaporwithWGPS
由2次实验可以看出,在美国南部地区,MODIS数据2种水汽产品的相关系数较高; 而在中国山西省,相关系数明显降低,反演精度也有了不同程度的下降。而投影寻踪模型反演的水汽无论在美国南部地区还是山西省均有较高的精度及相关系数,在山西省的精度甚至高于美国南部地区。由此可见,本文提出的算法具有一定的实用性和可推广性。
4 结论
1)本文对MODIS热红外通道展开了研究,结合投影寻踪模型,提出了一种新的遥感水汽反演算法。与传统的MODIS水汽反演方法相比,该方法比热红外反演具有更高的精度,而比近红外反演具有更高的时间分辨率,因此更具业务化推广的潜力。
2)利用该算法对美国南部地区及中国山西省的大气水汽含量进行反演,并用GPS水汽观测数据进行验证。其中美国南部地区反演结果的RMSE为2.478 mm,中国山西省的RMSE为1.408 mm,均低于相应热红外方法的RMSE,表明本文方法在2个实验区均能得到较好的反演结果。

4)实验中的数据样本均取自大范围晴朗无云的遥感影像。而在我国南方地区常有云覆盖,在基于投影寻踪模型的遥感水汽反演算法中如何减少云覆盖的干扰还有待于做进一步的研究。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
全球定位系统(2022年3期)2022-09-04
中等数学(2022年5期)2022-08-29
气象科学(2022年1期)2022-06-01
长江科学院院报(2022年5期)2022-05-19
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
数学物理学报(2021年1期)2021-03-29
中等数学(2020年2期)2020-08-24
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25