基于5G的V2X技术发展趋势
2018-09-04 09:37:32
汽车文摘 2018年9期
5G是实现未来汽车愿景的重要源动力技术,而包括汽车对汽车(V2V)、汽车对基础设施(V2I)、汽车对互联网(V2N)和汽车对行人(V2P)在内的V2X的发展对真正实现全场景自动驾驶,提高自动驾驶安全性至关重要。因此,基于5G的V2X智能发展是汽车行业最具价值的研究方向。
1 基于5G的V2X优化系统[1]
通过V2X通信合作的车辆的好处很多:
1)它们可以实现更安全的行驶;
2)改善高速公路、交叉路口和停车场的容量;
3)实现无缝的端到端移动性。
此外,在非视距条件下,V2X通信是唯一能够通过几乎瞬时交换车辆动力学来实现安全行为的技术。
下一代车辆V2X通信系统的最终目标是有效利用可用的道路实现无故障协作自动驾驶。为实现这一目标,通信系统需要启用各种用例,而每个用例都有一组特定的要求。分析主要用例类别以及它们的要求,并将其与当前可用的通信技术的功能进行比较,确定出他们之间的差距,并进行可能缩小差距的5G V2X系统设计。因此,提出了如图1所示的5G V2X无线接入网络的架构,其中融合了多种通信技术,包括在厘米和毫米波段的蜂窝网络、IEEE 802.11p和车载可见光通信。该系统可实现所有用例类别,最终实现无事故连接自动驾驶。

图1 异构Multi-RAT网络架构下的V2X通信系统[1]
LTE-V2X是已完成的第一套V2X通信的蜂窝标准,在原有的标准基础上,未来的5G V2X蜂窝系统将通过图1所示的三种不同范例提供支持V2X通信的主要无线接口:
(1)Cellular V2X;
(2)Cellular-assisted V2V;
(3)Cellular-unassisted V2V。
系统中采用毫米波通信一方面对于V2I通信,可以在车辆和附近基站之间建立短期高数据速率连接,以交换对延迟不敏感的数据;另一方面对于定向V2V通信,可用于支持特定用例。
车载可见光通信(VVLC)能够在单个通信系统中实现照明、通信和定位。VVLC中车辆前灯和尾灯中的发光二极管用于传输信息,而光电二极管或相机用作接收器。VVLC适用于精确的户外道路和室内停车定位,并作为RF V2X通信的支持(即通过多通信传感器融合实现容错行为)。此外结合卫星定位系统技术还可以实现一些关键的V2X用例。
显然,未来5G系统的发展对提供超低延迟、高可靠性的通信具有重要意义,并推动车联网的智能发展。
2 V2X撤销协议的形式化分析[2]
现有车载网络(V2X)安全性的研究已经形成了一系列安全机制和协议,解决了安全性和隐私问题。但这些安全性分析在很大程度上是非正式的,而正式分析可用于揭示缺陷,并最终在协议中提供更高级别的保证。
本文探讨了Rewire协议的两个版本Rewire Plain和R-token,该协议代表了在V2X架构中提出的撤销协议技术现状,而目前尚未在车辆中部署撤销协议。重点介绍了对V2X安全机制的特定要素的形式分析,即通过使其凭证无效来撤销V2X系统中的恶意或行为不当的车辆。即使在车辆定期更改其假名的情况下,也需要以不可链接的方式执行此撤销以实现车辆隐私。
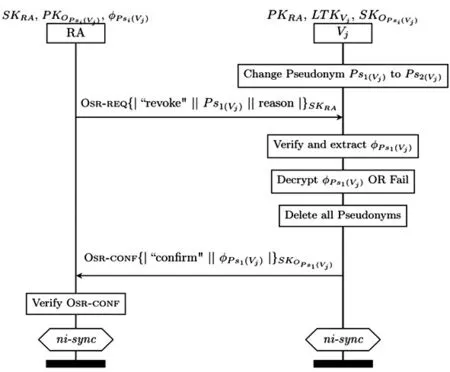
图2 O-token撤销协议[2]

图3 高级V2X撤销协议场景[2]
从正式建模中获得启发,对Rewire协议进行改进,开发出一种如图2所示的新的协议Obscure Token(O-token),其包含一个额外用于签名的非对称密钥对,增加在消息交换中用于可验证撤销的假名,要求汽车上的可信设备参与撤销协议,并且在完成时可以信任擦除汽车可能具有的所有假名。如图3案例场景所示,即使车辆改变了假名,O-token协议也允许撤销,并允许RA验证车辆发送的已删除其假名的信息。
在上述分析中,目前大多专注于功能正确性和身份验证,新的协议要求汽车上的可靠设备可以被信任以擦除汽车可能具有的所有假名。然而,这是否是汽车的正确信任模型仍然存在争议。未来更需要考虑推广正确性分析以便可以证明更一般的属性。
3 V2I网络的信息传递功能[3]
现代智能交通系统(ITS)是基于不同设备(固定或移动)之间的数据采集和信息交换而形成的,一方面随着信息来源数量的增加,对信息收集、处理和分发提出了新的挑战;另一个方面又需考虑数据安全性,尤其是对于车辆协作安全应用。本文旨在研究具有最适用于不同短距离通信技术的特定非关键ITS应用,重点是V2I类车载通信中的蓝牙和ZigBee适用性。如图4,通过一个通用ITS应用程序的案例研究,确定在V2I场景中发送消息的典型长度;并进行通信技术测试,如图5所示,在特定环境中对使用配备BT消息设备的两辆车进行现场测量。

图4 用于动态称重和车辆分类设置中的短距离通信分析的通用设置[3]
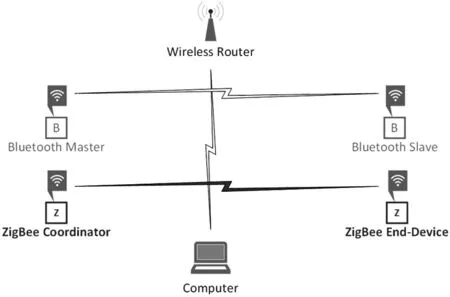
图5 测试平台[3]
测试结果表明,ZigBee技术适用于更长的通信距离,消息交换稳定性不受距离影响。而蓝牙技术消息交换时间的变化很大程度上取决于通信设备之间的距离。由于ZigBee PHY层延迟低于蓝牙技术,ZigBee技术足以满足ITS延迟容错应用中的短距离通信支持。通过在ITS中使用ZigBee,典型的动态称重、收费和车辆识别可以在简单的软件应用的能耗、成本和利用方面取得显著的经济效益。
通过有效使用信息可以增强道路交通安全性并减少环境污染,故以有效的无线通信设施作为基础,车载网络将为智能交通、环保交通、道路安全(碰撞检测及避免,合作驾驶)和车载互联网接入等各种应用开辟道路。
4 5G V2I网络的自适应信道预测、波束形成和调度设计[4]
5G网络一个重要用例是车辆到基础设施(V2I)的通信。由于5G基站(BS)一般具有多个天线,因此需采用波束成形来将其辐射模式引导至期望的车辆设备(VE)。此外,由于大多数无线标准采用OFDM系统,每个VE可以使用一个或多个子载波。本文提出了5G V2I通信的自适应信道预测,波束形成和调度的联合设计。
多用户系统的传输方案具有采样周期Ts和最大延迟扩展Td的信道。假设BS和每个VE分别配备有N个天线和1个天线。对于这些设置,多径CIR抽头L的数量近似为第k个VE与第n个BS天线之间的多径系数表示为:

建立上述系统和信道模型后,在没有训练信号和信道脉冲响应(CIR)模型的情况下设计信道预测算法。首先,利用自适应递归最小二乘(RLS)技术来预测来自过去和当前块接收信号的下一个块CIR(一个块可以具有一个或多个OFDM符号);然后,共同设计用于每个子载波的波束成形和VE调度,以通过利用预测的CIR来最大化上行链路信道平均和速率;最后,通过数值模拟证明所提出的信道预测和调度算法优于现有信道预测和调度算法的优越性。
5 未来联网车辆融合算法的V2V通信、LiDAR系统和定位传感器[5]
汽车行业正在从传统驾驶转向自动驾驶,这种改变的基本原理是车辆和其他类型的交通对象(例如交通灯)之间的数据通信和交换。了解近距离内所有交通对象的基本情况可以确保高级驾驶员辅助系统(ADAS)的更精确反应。因此,车辆到车辆(V2V)技术有助于提高交通安全性。本文描述了基于商用车载单元(OBU)的V2V通信的研究。特别指出了通信技术与高精度定位共存的重要性,对V2X通信,Li⁃DAR技术和GNSS定位系统进行了基础研究和评估。
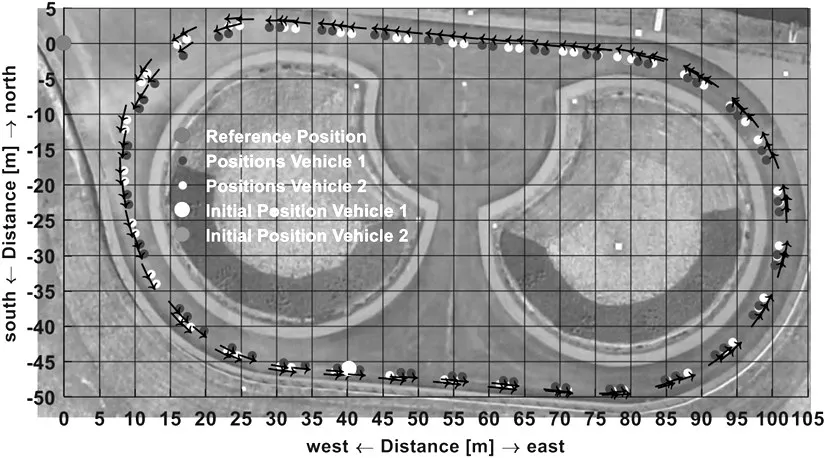
图6 使用V2V技术进行相对定位[5]
使用V2X通信,提出并实现了交通对象之间相对定位的方法。如图6所示,基于IEEE 802.11p标准(ETSI ITS-G5)发送和接收数据,其中包括位置、运动矢量和车辆配置等基本参数以确保相对定位。

图7 城区Velodyne VLP 16感知示意图[5]
对于精确的对象定位,测距系统(LiDAR)可提供最佳精度的高分辨率,360°LiDAR系统投入运行可记录下交叉情况。图7中Velodyne VLP 16同时处理两个目标,红色汽车配备有LiDAR,尽管LiDAR安装在1.8 m的高度,仍被城区物体大面积遮挡。因此,橙色汽车基于在大约25 m的距离内由一个水平产生的点进行分类。

图8 (a)高度城区测试轨迹(b)试车道部分轨迹[5]
为了改善自我车辆的绝对位置,进行了如图8所示的具有RTK功能的GNSS模块的研究。对于定位部件,在通信单元上已经集成的GPS模块旁边使用附加硬件。u-blox的NEO-M8P模块,利用一个模块作为基站,一个作为流动站的差分全球定位系统(DGPS)原理,适用于高性能定位;支持实时动态(RTK)服务,可提供厘米级精度。使用基站发送校正数据,显著提高了流动站位置的准确性。
结论:上述三个独立系统为未来的研究工作提供了巨大的潜力。通过传感器融合可将系统组合优化发挥更大的作用,特别是V2X信息与LiDAR数据的融合可提供很大的潜能。通信、传感器融合算法和完整性考虑因素的相互作用构成了自动驾驶的基础,融合不同的传感器信息提高了ADAS的精度和可靠性。
猜你喜欢
科学与信息化(2021年12期)2021-12-27 01:39:02
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
铁道通信信号(2019年11期)2019-05-21 03:05:46
出土文献与古文字研究(2018年0期)2018-11-04 00:42:00
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:42
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:44
学习月刊(2015年1期)2015-07-11 01:51:12
电子设计工程(2015年8期)2015-02-27 12:05:33