
基于线性自抗扰技术的舰炮伺服系统仿真研究
2018-09-02 11:08马晓贺李翔宇
舰船科学技术 2018年8期
马晓贺,李翔宇
(中国船舶重工集团公司 第七一三研究所,河南 郑州 450015)
0 引 言
舰炮是装备在舰艇上用于对海作战、对空防御和对岸火力支援的重要武器之一。由于舰炮具有射速高、反应快、持续作战能力强、使用效费比高等优点,得到各国海军重视[1]。随着未来海战的不断变化,舰炮面临着新的挑战和要求,不断推动着舰炮向着高精度、远射程的方向发展。舰炮伺服系统的控制精度直接影响着射击精度。同时,舰炮伺服系统是一个负载变化大、非线性因素多、扰动强的非线性系统,采用传统的PID控制算法难以实现高精度和强抗干扰性[2]。
本文在分析舰炮伺服系统组成结构并对负载转矩进行分析的基础上,将线性自抗扰控制技术运用到位置控制器中,利用Matlab/Simulink对系统进行仿真,对比了PID,LADRC和Model-assisted LADRC控制算法的控制效果。
经过联合药物治疗后,观察组患者的舒张压及收缩压为(70.04±5.33)mm Hg、(89.62±8.47)mm Hg,对照组患者的舒张压及收缩压为(102.25±8.14)mm Hg(140.52±10.09)mm Hg,两组差异明显,具有统计学意义,P<0.05,见表1。
1 伺服系统建模
1.1 伺服系统组成
舰炮伺服控制系统由控制器、驱动器、三相永磁同步电机(PMSM)、减速机、反馈元件等设备组成。系统采用典型的三闭环控制结构。其中,电流环和速度环在驱动器内部实现,均选用PI控制器,本文将重点对位置环控制器进行设计。控制结构框图如图1所示。
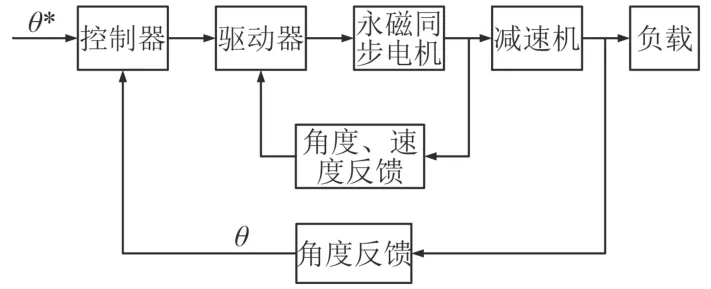
图1 舰炮伺服系统控制框图Fig. 1 Control block diagram of naval gun servo system
1.2 永磁同步电机数学模型
采用矢量控制策略使id=0,在dq坐标系下建立永磁同步电机数学模型,其电压方程为:

dq轴的磁链方程为:

气、液、超临界CO2相态及物性计算模型研究………………………………………………………………王 庆,吴晓东(2.11)

计算模型除坡面设为自由边界外,模型底部(z=2800)设为固定约束边界,模型四周设为单向边界。在初始条件中,不考虑构造应力,仅考虑自重应力产生的初始应力场。

1.3 负载分析
本文主要对水平方向的负载转矩进行分析,永磁同步电机通过减速机连接负载,运动过程中需要克服的力矩有:方向座圈的摩擦力矩、射击作用产生的附加阻力矩和惯性力矩。
1)方向座圈的摩擦力矩

2)后坐力附加的阻力矩
无论生活怎么奔波辗转,我始终没有忘记少年时期记忆中的原野、河流、青草、花朵、农田,还有长着一双美丽大眼睛的小满。
因为射击角度不同,后坐力对座圈的作用方向不同,不考虑水平分力和倾覆力矩对座圈的影响。

在电机带动负载运动过程中有:
3)惯性力矩

运动射击过程中需要克服的总负载力矩

将线性状态误差反馈控制率(LSEF)设计为PD组合。

式中:i为减速比;为传动效率。
国防科工局、总装备部和国家保密局2014年联合印发了《关于加快吸纳优势民营企业进入武器装备科研生产和维修领域的措施意见》,通过军地双方近年来在政策宣传、试点摸索、激励引导等方面坚持不懈的努力,截至2016年3月,我国已有1000多家民营企业获得武器装备科研生产许可证,比“十一五”末期增加127%,[1]为军品科研生产市场注入了新的活力,“民参军”成为军民融合发展的主流模式。但与此同时,在利用先进军事科技技术推动经济建设方面,受各种条件制约,步子还没有迈开、成效还不太显著,融合双方的互动不对称。
AIS是较常见脑血管类疾病[7]。有研究显示,炎症反应在AIS的发病及预后中发挥重要作用,其中,细胞因子作为炎症反应所释放出的炎症介质,在AIS发生过程中起一定的调节作用[8-9]。IL-33可通过多种细胞和组织表达,对心脑血管起保护作用[10-11]。CXCL12可介导炎症反应,较好地促进组织及血管再生。
2 模型辅助线性自抗扰控制器设计
自抗扰控制(ADRC)应用现代控制理论状态观测的原理,对系统的扰动情况进行观测和补偿,具有较强的鲁棒性[3-4]。自抗扰控制技术已在伺服系统控制、飞行器控制及过程控制等领域中得到了很好的应用[5–7]。文献[8]为提高火炮伺服系统的抗干扰性,采用ADRC对系统进行控制仿真,取得了较好控制效果。同时也发现其参数整定复杂,不利用工程应用。为使自抗扰技术得到更好的工程化应用,高志强提出了线性自抗扰控制(LADRC),减少了控制参数,简化了参数整定过程[9]。
从式(5)~式(7)可以看出,负载转矩在射击和运动过程中不断变化,这一变化可以看成是外界干扰。
舰炮伺服系统中面临的主要干扰包括摩擦力矩、射击附加力矩等。为提高系统的控制性能所设计的线性自抗扰控制器结构,如图2所示。
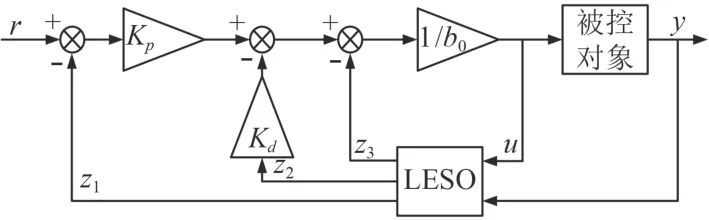
图2 LADRC结构框图Fig. 2 Block diagram of LADRC
系统可简化为1个二阶系统,

式中:y,u分别为系统输出和输入;可以从模型中得到,并按仿真结果进行调整;w为扰动;f为总扰动;b0为已知部分。
A:产后恢复一定要从产前就开始着手准备。怀孕不代表就要猛吃,营养要适度、均衡。产前要不断运动,产前我每天快步走五公里,把体重控制在合理的范围内;产后我在顺产三个月后恢复产前的体重,是因为我并没有娇惯自己,没有因为喂奶而猛吃,而是适量、营养、均衡地吃。出了月子我就开始着重锻炼松懈的腹部和大腿!推健腹轮是一项产后减脂塑形的好运动。如果不幸宝妈们在产前没控制住自己,产后就要加倍努力哦!而且即便带娃、喂奶、熬夜时也不能松懈。你会发现锻炼身体不仅没有增加疲惫,反而使你更有力气和精力。

式中:
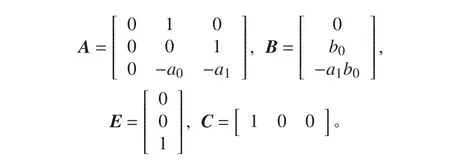
构造模型辅助线性扩张状态观测器(LESO)为:
高校校园是一个极具潜力与规模的市场,大学生有自己对于校园文化不同的理解与诠释,他们擅于利用网络表达自己的观点与理念,新潮的思维使他们成为消费文化的引导者甚至缔造者。

把特征方程的极点放在同一位置( )上,取观测器的增益矩阵为:
这两句话是关于两组实验结果的对比结论,通过重复动作的实施对象:their partners,达到强调的效果,也有效地将两句话之间的对比关系凸显出来。动物学是一门主要以实践和研究为主的学科,在叙述实验过程和结果时,常要重复使用实验中的实验对象,条件等相关词汇,用以表示强调。因此,在动物学英语语篇中经常会大量使用重复的词汇衔接手段来突出主题。
−ω0

使得:

折算到电机轴总负载力矩

根据线性自抗扰的参数整定方法[10],确定比例和微分系数:
紧头位置偏差会影响单支烟的重量,如果紧头位置偏差超过允许范围,会导致同一支双倍长烟切下的两支单支烟一支偏重、一支偏轻,影响烟支标准偏差。由于平准盘和切刀盘同步情况较好,所以紧头位置一般变动较小,故无须频繁调节。其基本原理为检测紧头位置偏差,只有紧头连续多次向同一方向偏移,并且偏移量超出允许范围后才进行调节。事先标定出PLC输出和平准盘相位之间的对应关系,然后进行定量调节。
令我没想到的是,在新一轮的人事任命中,我竟然被任命为县林业局的局长。蔡大姐和局里的那帮兄弟姐妹们来恭喜我的时候,我却苦着一张脸要哭了。我对大家说,同志们啊,你们知道吗?林业局是什么?那是一个火坑啊!前三任局长都已前赴后继进了班房,我孙东西就是第四个啊!蔡大姐拍着我的肩膀说,小孙,不要那么悲观嘛,只要你不贪不腐不烂,别人又岂奈你何?

3 伺服系统仿真及结果分析
本文利用Matlab/Simulink对舰炮伺服系统进行仿真,仿真系统如图3所示。
阶跃调炮30°,由图4可知,采用PID算法的调节时间为0.65 s;采用LADRC的调节时间为0.48 s;而采用Model-assisted LADRC控制,系统的调节时间为0.45 s响应时间短,且超调最小。
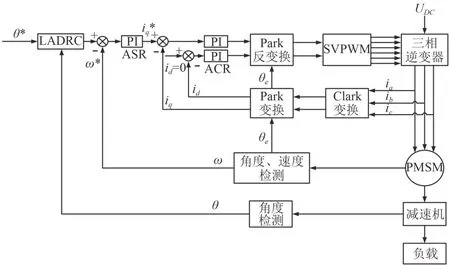
图3 伺服仿真系统Fig. 3 Servo simulation system

图4 阶跃响应对比图Fig. 4 Step response diagram
系统稳定状态下,根据1.3节中负载转矩的分析,突加转矩扰动。如图5所示,在PID控制下舰炮水平角度有明显波动,角度最大误差为0.023°,恢复时间为0.25 s;在LADRC控制下,角度最大误差为0.003°,恢复时间为0.1 s;在Model-assisted LADRC控制下,角度最大误差为0.002°,恢复时间为0.07 s,控制效果最优。
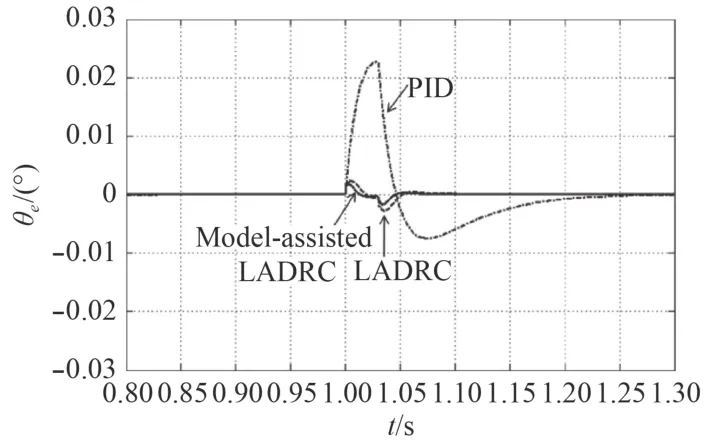
图5 干扰抑制对比图Fig. 5 Interference suppression diagram
4 结 语
本文在分析负载转矩的基础上,利用模型辅助线性扩张状态观测器对系统总扰动进行观测,并进行了补偿。通过仿真试验,对比了PID,LADRC和Modelassisted LADRC的控制效果。试验结果表明Model-assisted LADRC使系统具有更强的抗干扰性能和动态性能,且参数调节简单。
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
军事文摘(2021年16期)2021-11-05
防爆电机(2021年5期)2021-11-04
军事文摘·科学少年(2021年8期)2021-09-10
航天工业管理(2020年9期)2020-12-28
电机与控制学报(2018年9期)2018-05-14
