
水下通信定位识别一体化波形优化方法
2018-09-01 09:25:38徐媛媛
现代导航 2018年4期
徐媛媛
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
由于电磁波在水中传播时衰减严重,而声波是人类迄今为止已知的唯一能在水中远距离传播的能量形式,海洋中的探测、通信、定位、导航和识别主要是利用声波实现的[1]。因此,对水下通信定位识别一体化波形优化的研究主要集中在对水声通信、定位、识别的研究之上。
水声通信技术经历了从模拟通信阶段到数字通信的发展过程。主要分为采用非相干调制和相干调制两大类。非相干调制方式在抗强多途干扰、大信号起伏和低信噪比上具有明显的优势,但带宽利用率较低。相干调制方式的传输速率更高,但存在计算复杂度高的问题[2]。
水下目标定位的主要手段是依赖于几何原理的水声学定位方法。按照接收基阵的尺寸或应答器基阵的基线长度来分类,水声定位技术可以分为长基线、短基线和超短基线三种。长基线和短基线系统多采用距离——距离系统,而超短基线系统多采用距离——方位系统。按照工作方式可分为同步式水声定位系统和异步式水声定位系统,分别采用球面(或双曲面)交汇的方法得到目标在信号发射时刻的相对或绝对坐标。
身份识别是水下各平台协同应用中需要解决的首要问题之一。主要分为协同识别和非协同识别两种。“协同”识别中目标的身份属性信息是采用事先约定的方式进行交换的。非协同方式中识别方不需要被识别目标的配合,通过主动或被动方式获取目标的物理特征和辐射信号后,对数据进行特征提取、分类和特征匹配实现对目标身份属性的判别。所以协同识别方式信息获取速度快、实时性强、识别率高、容易建立安全和保密的信息交换方式[3-4]。
目前,水下通信、定位、识别技术多是从单一技术的研究为主,缺少对集水声通信、定位和识别功能于一体的多功能系统的研究。因此,为解决水下各平台间的信息分发、态势共享和指挥控制等协同应用问题,需要实现水下通信、定位、识别一体化波形优化技术,为水下网络化信息系统的研制与发展提供技术支撑。
1 方法流程
步骤1:根据系统指定的发射声源级SL、传输距离r和声纳指向性指数DI,通过声传播损失经验曲线图1和海洋环境噪声谱曲线图2,确定水声传输波形信号的中心频率f,执行步骤2。
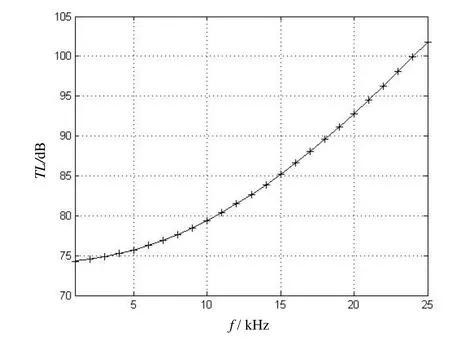
图1 水下声传播损失经验曲线图
声传播损失TL计算公式如下:

步骤2:根据系统指定的发射声源级SL、传输距离r和声纳指向性指数DI,通过被动声纳方程选择合适的水声传输波形数据信号的带宽Δf1,执行步骤3。

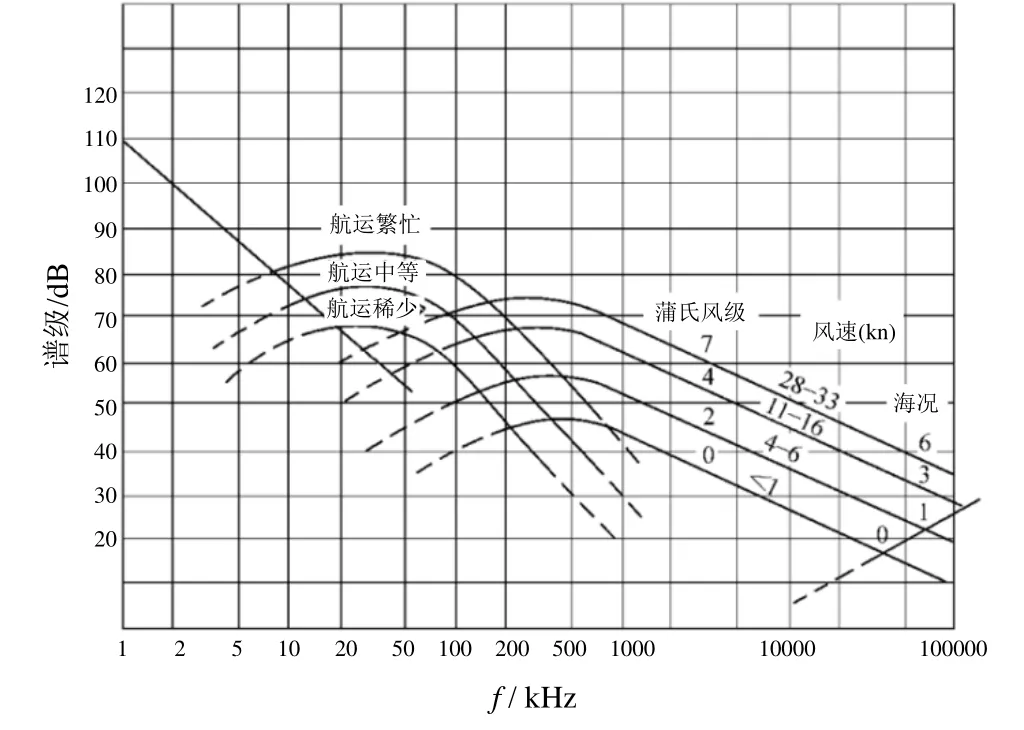
图2 深海环境噪声谱曲线图
噪声级NL计算公式如下:

被动声纳方程如下:

步骤 3:根据得到的水声传输波形数据信号的带宽Δf1和中心频率f,通过被动声纳方程计算得到系统指定发射声源级SL、传输距离r和声纳指向性指数DI条件下的传输波形数据信号检测阈DT,执行步骤4。
步骤 4:根据得到的水声传输波形数据信号检测阈DT,以及系统指定的误码率指标,确定水声传输波形信号的调制方式和编码方式,执行步骤5。
步骤 5:根据得到的水声传输波形数据信号的调制方式和编码方式,以及系统定位的工作方式,确定水声传输波形的同步信号形式及信号频带范围Δf2,执行步骤6。
步骤 6:根据得到的水声传输波形的同步信号形式及信号频带范围Δf2,若满足系统定位的最小分辨距离指标Δd,执行步骤7;若不满足距离分辨率指标,执行步骤 3,修正之前得到的传输波形信号的带宽Δf1。
步骤 7:根据得到的水声传输波形的同步信号形式及信号频带范围Δf2,以及系统指定的定位工作方式和传感器节点距离r,选择合适的水声传输波形同步信号的时间长度T,执行步骤8。
步骤 8:根据得到的水声传输波形同步信号时长T,计算通信定位识别一体化波形的敌我识别概率。若满足系统识别功能指标,执行步骤 9;若不满足系统识别功能指标,执行步骤 7,修正之前得到的同步信号时间长度T。
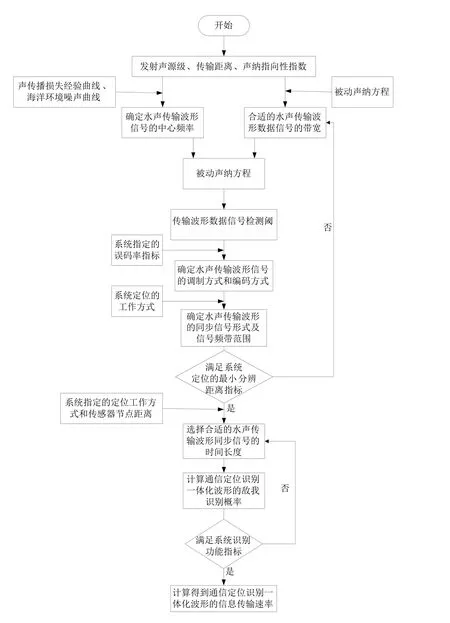
图3 水下通信定位识别一体化波形优化方法工作流程图
步骤 9:根据得到的水声传输波形数据信号的调制方式和编码方式,以及同步信号形式、频带范围Δf2和时长T,计算得到通信定位识别一体化波形的信息传输速率。
2 实例说明
(1)根据系统指定的发射声源级SL=150dB、传输距离r=5km和声纳指向性指数DI=0,通过图2所示的声传播损失经验曲线和图3所示的海洋环境噪声谱曲线,确定水声传输波形信号的中心频率f=6kHz 。
(2)根据系统指定的发射声源级SL、传输距离r和声纳指向性指数DI,通过被动声纳方程选择水声传输波形数据信号的带宽Δf1=4kHz。
(3)根据得到的水声传输波形数据信号的带宽Δf1=4kHz和中心频率f=6kHz,通过被动声纳方程计算得到系统指定发射声源级SL、传输距离r和声纳指向性指数DI条件下的传输波形数据信号检测阈DT=-1 2dB 。
(4)根据得到的水声传输波形数据信号检测阈DT,以及系统指定的误码率指标BER<10-4,确定水声传输波形数据信号采用未编码的(8,255)循环移位扩频的BPSK调制方式。
(5)根据得到的水声传输波形信号的调制方式和编码方式,以及系统采用基于短基线的异步式距离——距离水声定位方式,确定水声传输波形的同步信号形式为与数据信号并行的直接序列扩频信号,扩频码长度为 255,信号频带范围为Δf2=4kHz 。
(6)根据得到的水声传输波形的同步信号形式及信号频带范围Δf2,计算得到最小分辨距离Δd=0.75m ,满足系统定位的距离分辨率指标Δd<1m 。
(7)根据得到的水声传输波形的同步信号形式及信号频带范围Δf2,以及系统指定的定位工作方式和传感器节点距离r,选择水声传输波形同步信号的扩频码长度为 255,同步信号时间长度T=127.5ms 。
(8)根据得到的水声传输波形同步信号时长T,计算通信定位识别一体化波形的敌我识别概率,满足系统识别功能指标。
(9)根据得到的水声传输波形数据信号的调制方式和编码方式,以及同步信号形式、频带范围Δf2和时长T,计算得到通信定位识别一体化波形的信息传输速率Rb=62bits/s 。
依据水下通信定位识别一体化波形优化方法设计的波形,在发射声源级SL=150dB 、传输距离r=5km 和声纳指向性指数DI=0条件下,同时实现了Rb=62bits/s 的误码率BER<10-4的通信功能、5km范围内最小分辨距离Δd<1m的距离——实现了距离方式定位功能和敌我识别概率的识别功能。
3 结语
水下通信定位识别一体化波形优化设计流程与方法,针对现有水下多功能一体化系统研究的不足,提出了一种基于水声传输波形的多功能优化设计流程和方法,与传统的传输波形设计相比,在波形设计时综合考虑定位和识别功能的实现,通过一套传输波形实现水下网络节点间的通信、定位和识别三种功能,可以有效促进水下作战态势的形成以及态势信息的分发与共享,为提升水下多平台协同能力提供重要基础。
猜你喜欢
传感器世界(2023年7期)2023-10-15 08:00:04
太原师范学院学报(自然科学版)(2022年1期)2022-03-23 01:05:56
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电子测试(2018年14期)2018-09-26 06:04:12
沈阳理工大学学报(2017年5期)2017-11-03 08:14:30
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电子技术与软件工程(2016年6期)2016-05-14 07:11:51
