
基于植保无人机的电池续航供电系统设计
2018-08-29 06:44张文涛
自动化与仪表 2018年8期
杨 铭,赵 珊,张文涛,任 嘉,蒋 峰
(中南林业科技大学 计算机与信息工程学院,长沙 410004)
随着无人机技术的日益发展,对用于农林植物保护作业的无人机工作状态的要求越来越高,而目前无人机的实际工作情况是续航时间一般只有20~30 min,对此提出了利用太阳能和电池进行互补供电的新型无人机智能电源切换系统。
太阳能既是一次性能源,又是可再生的能源。它存量丰富,既可免费使用,又无需运输,对环境无任何污染。太阳能作为一种全新的能源利用方式,在低碳经济模式快速构建的过程中将起到越来越重要的作用[1]。目前,利用太阳能进行供电的地方很多,诸如太阳能发电并入电网、路灯供电等。由此,研究一种高效的、将太阳能运用在其他方面的方式变得更加可行,文中提出将太阳能作为与蓄电池形成互补供电的特殊供电装置;针对无人机用电电路的实际需要,采用逻辑门电路和MCU相结合的思路设计,给出高效智能的自动切换供电系统的设计方案。
1 无人机供电系统工作原理分析
无人机系统通常由蓄电池、四轴或多轴上的电子调速器(简称“电调”)和电机、飞行状态控制器(简称“飞控”)、电路分接板、GPS组成。文中以实际试验所用四轴飞行器为例,系统框架如图1所示。
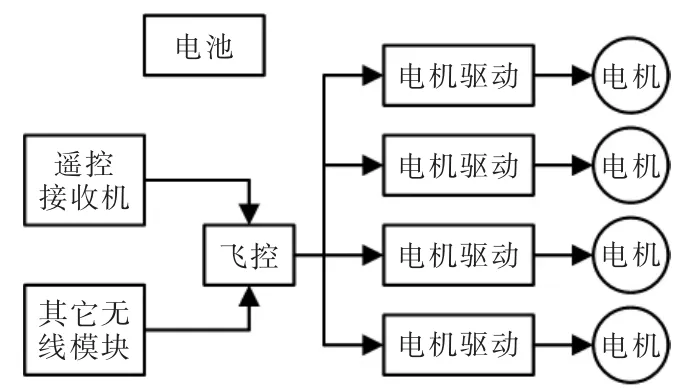
图1 四轴无人机系统框架Fig.1 Four axis UAV system framework
在该系统中,蓄电池一般使用3S电池,其输出电压为11.1 V;蓄电池外接在供电分接板上,使四轴上的4个电调与电机形成并联,能够分别得到等量的电压以供给4个电机实现等速转动,与此同时,从分接板上引出了给飞控供电的供电端口,使得飞控也能正常通电,产生飞行控制的作用,并由飞控带动GPS工作,为四轴飞行器提供实际的定位需求。其次,大多数飞行器的控制端发射器也由蓄电池进行主要供电。
然而,目前市售的电池多为1800~3300 mA·h(本实验室使用的2块电池分别为1800 mA·h和2300 mA·h)。这些电池通过理论计算和实际试飞不难发现,其续航时间大约都在10~20 min,且无法在电池电量不足的情况下再对飞行器进行回收,并且这样做会给电调造成不可修复的伤害。对此,提出了用于无人机系统的太阳能供电装置,在光强充足的情况下,同时为蓄电池转换多余的电能并进行储备;在光照强度不够太阳能供电的情况下,为无人机系统切换为蓄电池供电。根据该供电系统的工作过程,可以得出电能存在双向转换:太阳能电池板→无人机系统↔蓄电池,为此需设计一个双向的DC-DC变换的无人机供电系统。
由于太阳能电池板的输出电压为12~15 V,无人机电源需求电压为11.1~12 V,蓄电池的输出电压为11.1 V。该太阳能供电装置系统的原理如图2所示。
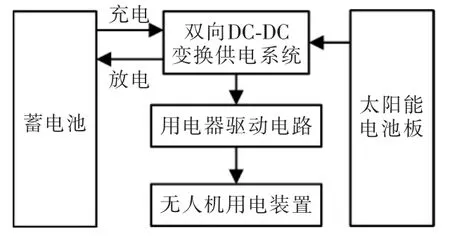
图2 太阳能提供电能给无人机供电系统原理Fig.2 Solar energy supply to UAV power supply system schematic
2 双向DC-DC变换供电控制系统的设计
根据该太阳能提供电给无人机供电系统的工作原理分析,要实现对无人机系统的供电控制,关键在于设计一个能够进行智能切换的双向DC-DC变换器。在此重点介绍双向DC-DC变换供电控制系统的设计实现过程。
2.1 系统的工作模式以及性能指标分析
如上所述,双向DC-DC变换供电控制系统不仅需将太阳能电池板的12~15 V输出电压对无人机系统进行供电,还需能将自身12~15 V电压转换为4.2~5 V给无人机的蓄电池供电,并自动监测太阳能电池板的输出电压,智能切换蓄电池的工作状态。因此,该供电控制系统具有恒流充电、升压放电、自动切换3种工作模式。其充电电压为5 V,考虑到无人机蓄电池的使用寿命,采用恒流充电,电流大小设定为2 A;降压状态下,其电压需从12~15 V降到10.5~11.5 V进行供电。
2.2 系统的设计
该供电控制系统通常有隔离型和非隔离型2种设计方式。隔离型抗干扰能力强,体积较大,或同等体积下功率较小,通常用于高压情况;非隔离型结构简单,体积小,成本较低,输出电压调节范围宽,适用于低压供电场合。在此电压为15 V,故选用非隔离型的拓扑设计方式。
考虑到研发周期、设计难度,拟选用集成的降压、升压稳压芯片通过外扩简单的外围电路,构建Boost/Buck型电路,实现双向DC-DC变换供电控制系统的设计。由于蓄电池充电时,该系统需要恒流,故设计中将降压稳压电路的取样反馈回路换成输出电流取样反馈,采用低端电阻取样方式实现。
整个供电控制系统由双向DC-DC变换器、测控电路组成。其中,双向DC-DC变换器主回路包括恒流电路和升压型稳压电路;测控电路包括电流取样电路、过压保护电路[6]、充放电模式自动切换电路以及显示电路。双向DC-DC变换供电控制系统的组成结构如图3所示。
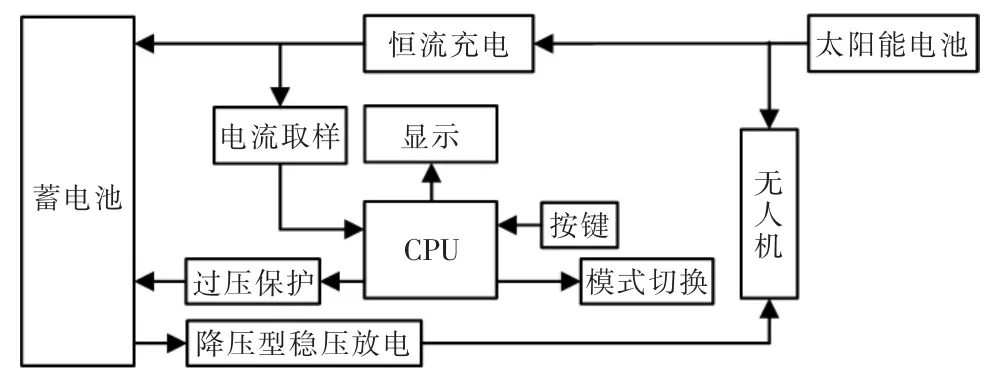
图3 双向DC-DC变换供电控制系统组成结构Fig.3 Structure of bidirectional DC-DC transform power supply control system
2.2.1 恒流充电模块设计
由于该模块工作在降压充电的状态,根据稳压的原理,考虑到电流稳定精度以及转换效率,选用降压开关型集成稳压芯片LM2596实现。该芯片是电源管理单片集成电路,其最大输入电压为40 V,最大输出电压为37 V,最大能够输出3 A的电流,同时具有很好的线性和负载调节特性,适用于搭建本系统的恒流电路,设计中通过将电压取样换成电流取样反馈到芯片反馈引脚实现恒流控制。其降压恒流电路如图4所示。
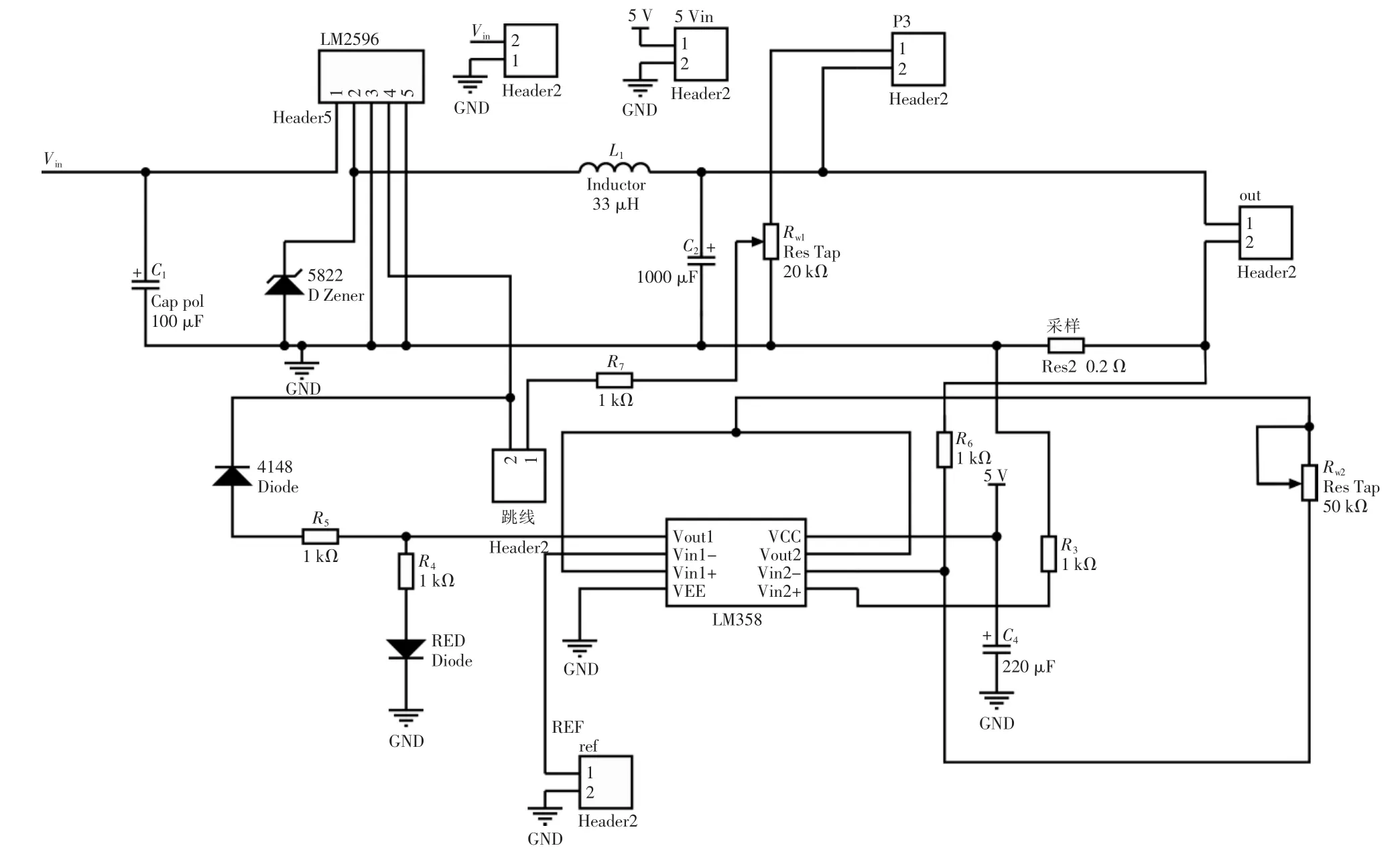
图4 LM2596构成的恒流充电电路Fig.4 A constant current charging circuit made up of LM2596
电感线径的选择主要由系统的开关频率确定。开关频率越大,线径越小,但是所允许经过的电流越小,并且开关损耗增大,效率降低。由于LM2596恒流电路中需要通过3 A内的电流,故电感采用0.7 mm漆包线进行绕制,磁芯采用铁硅铝黑色磁芯。对电感的计算需先计算电感电压与微秒的乘积,即式中:Vsat为内部开关饱和电压;VD为二极管正向压降;Vin为输入电压;Vout取输出电压的中间值。根据电路的设计要求,将数据代入式(1),当最大电流为3 A时,确定的电感为33 μH。

为提高电路转换的效率,该模块要求所选二极管的开关速度快,正向压降低,且能保护电路,设计中选用吸纳二极管。吸纳二极管是一种快速恢复二极管,在此用以为电感电流(当开关管闭合时)提供通路,故所选吸纳二极管的最大电流承载值至少为最大负载电流的1.3倍。考虑到此电源在恶劣环境下需承受连续的短路输出,因而该二极管最大电流承载值应等于LM2596的极限输出电流。
对于该二极管,其最坏的工作情况是输出短路或过载,故其反向耐压最小为模块最大输入电压的1.25倍。因此,考虑到最大输出电压以及二极管的损耗影响,该电路的二极管选用肖特基二极管1N5822。1N5822具有正向导通电压低(为0.52 V),反向击穿电压高(为40 V),反向击穿电流大(为3 A)等特点。布线时,1N5822必须靠近LM2596,且其管脚要短,连接的铜线也要短。
电路中电容值的计算公式为

由于电路中通过的电流较大,且最大输入电压为40 V,故电容的耐压值选定为50 V,其容量根据所设计电路的实际需求分别选取100,220,1000 μF的电容。在电压输出端并联多个低阻值瓷片电容,以减小输出的电压纹波。
电流采样,通常采用电阻取样及电流传感器取样的方式。由于整个系统采用非隔离方式,为简化设计,采用低端电阻取样的方式,其阻值过大容易引起压降,造成电压误差。根据经验,取样电阻选择0.1 Ω/3 W。
2.2.2 升压稳压放电模块设计
同样考虑到电压输出精度以及转换效率,升压型稳压电路选用集成直流升压稳压芯片XL6009。该芯片内置N沟道的功率MOSFET和固定频率振荡器,功耗小,输出电压稳定,体积小,重量轻,转化效率高,最高输出电压可达60 V,符合要求。升压放电电路如图5所示。
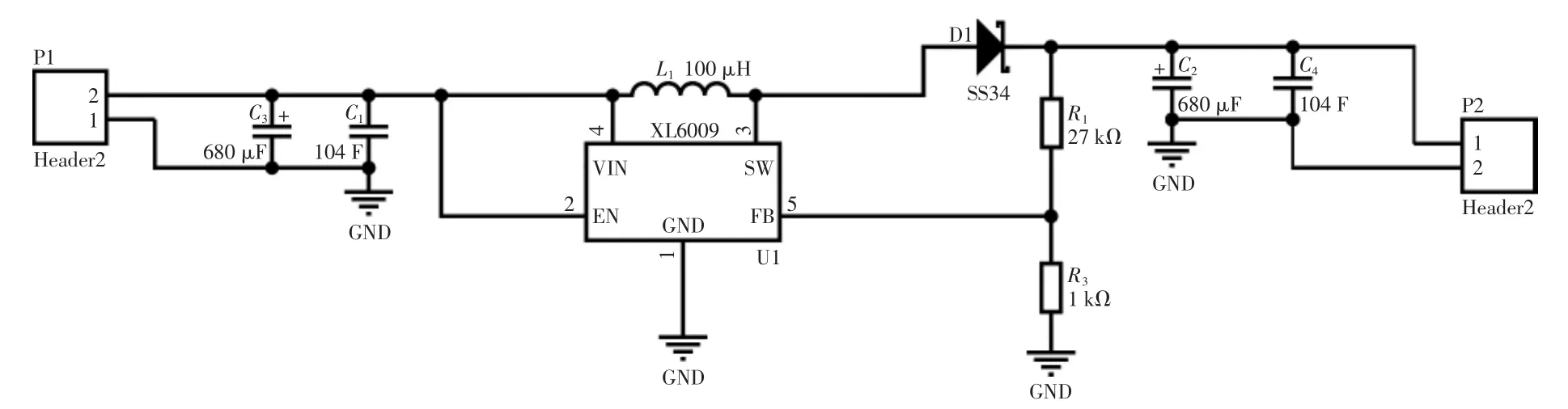
图5 XL6009构成的升压稳压电路Fig.5 A boost voltage regulator composed of XL6009
2.2.3 测控电路
测控电路主要实现对模拟信号的取样、放大处理以及过压保护、切换控制等。电流取样采用低端电阻取样方式,所取信号经电压放大后进行采样、误差放大处理。过压保护通过分压电阻网络对蓄电池两端充电电压进行采样来实现自动断电。充放电模式自动切换电路的原理等同过压保护电路,通过采样直流稳压电源的输出电压实现。
电路实际设计时,考虑到LM358的应用比较广泛,且电路搭建方便,价格适宜,故最终选用LM358进行信号的放大处理。LM358是内部包括2个独立的、高增益、内部频率补偿的双运算放大器。
控制芯片选用STC单片机STC89C52。切换控制通过固态继电器作为控制开关实现自动切换,其电路如图6所示。过压保护电路通过设计1个迟滞比较器来实现。
3 供电控制系统的程序编写
根据双向DC-DC变换供电控制系统的功能要求,整个系统程序需完成按键识别、A/D采样、步进控制、D/A转换、过压保护、数据显示以及充放电自动切换。其主程序实现流程如图7所示。
4 测试与讨论
按照系统设计所要求的性能参数指标,对该无人机供电系统进行了功能、指标测试。具体调试步骤按照分模块测试、软件调试、软硬件系统联调、空载测试以及带负载测试来进行。
设置充电电流为2 A,输入电压固定在5 V时,所测实际充电电流为2.012 A,其变化率k为


图6 自动切换控制电路Fig.6 Automatic switching control circuit
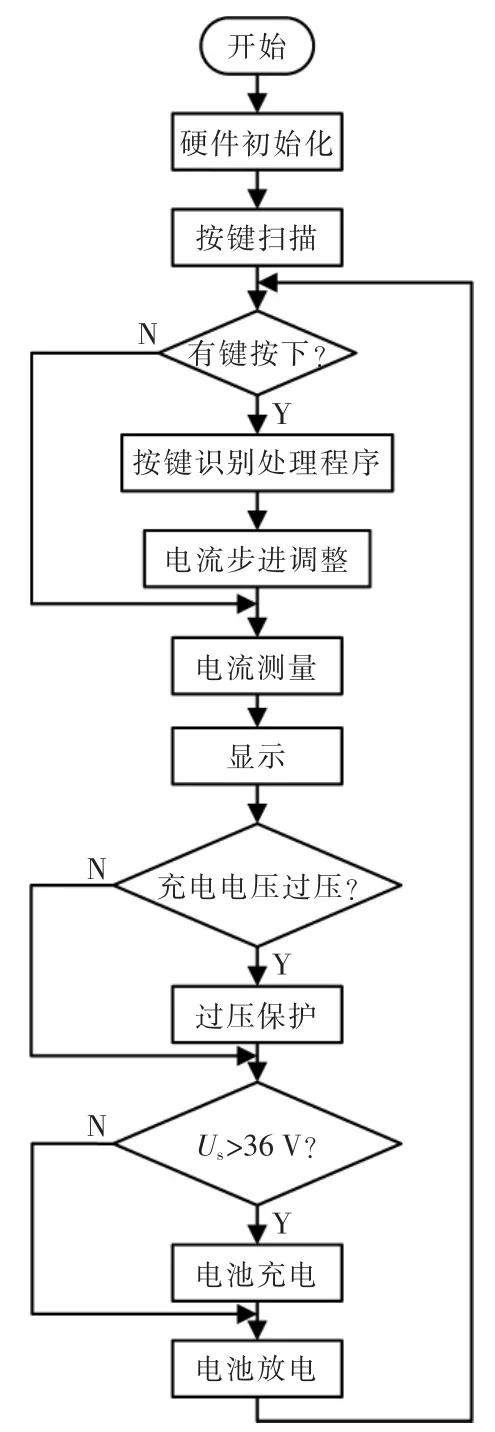
图7 程序实现流程Fig.7 Program implementation flow chart
式中:Ic为测量值;Is为设定的理想值。经过计算所测定的充电电流变化率为0.35%,表明电流稳定度较高,满足要求。
能量转换效率η为

式中:P1,P2分别为充放电模式下的输出、输入功率。按照所测定的输入/输出电压、输入/输出电流进行计算,可得:放电模式下η=82.3%;充电模式下η=81.2%。
由测试结果可以看出,存在以下元件的损耗:
①肖特基二极管的损耗 当二极管导通时,流经二极管的电流等于电感电流,能量损耗为其导通电阻上的压降,大小为P=I2RD。
②电感由于导线存在电阻,引起的能量损耗为

式中:Re为雷诺数。
③数字电路的损耗 数字电路的损耗包括D/A、单片机、电机以及采样电路等元器件的工作损耗。
虽然能量转换效率较高,但仍有改进的空间。由于影响效率的主要是磁性元件、功率器件,与控制器的关系不是很大。故在选择电感、电阻等功率元件时,应考虑元件自身能量的损耗,根据公式进行计算,选择合理的参数,以降低损耗,提高效率。由于理论计算存在误差,如有可能可以通过选用不同参数的元器件进行多次测试,最终确定合适的效率较高的元器件。
5 结语
所设计的太阳能无人机供电系统,经过测试、试验检验,能够实现供电方式的自动切换,实现对蓄电池的保护,并延长无人机的续航时间,且能量转换效率高,稳定性较好,具有很好的实际应用价值。
猜你喜欢
电气技术(2022年6期)2022-06-27
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
电子制作(2018年17期)2018-09-28
电子制作(2016年19期)2016-08-24
中学物理·高中(2016年1期)2016-05-26
电子制作(2016年21期)2016-05-17
中学科技(2015年10期)2016-01-06
探测与控制学报(2015年4期)2015-12-15
安徽化工(2015年4期)2015-12-12
