
基于模糊PID铺丝机恒张力送丝控制系统设计
2018-08-29 06:44戴惠良孙伟东
自动化与仪表 2018年8期
骈 健,戴惠良,孙伟东
(东华大学 机械工程学院,上海 201620)
铺丝机是复材成型特种机床,它解决了复杂轮廓复材制件成型困难和成本高的问题[1]。目前,铺丝机的关键技术主要掌握在西方国家手中,我国的研究起步相对较晚,复材成型技术远落后于西方发达国家。《国家中长期科学和技术发展规划纲要(2006—2020年)》中将“开发满足国民经济基础产业发展需求的高性能复合材料及大型、超大型复合结构部件的制备技术”列入重点研究内容[2]。
纤维张力在铺丝机铺丝过程中起关键作用,张力控制的好坏是评价纤维自动铺放工艺极为重要的性能指标[3]。铺丝过程中张力的波动会使复材制件力学性能大大降低,因此文中设计了一套铺丝机恒张力送丝控制系统,进行Simulink仿真并搭建了试验平台进行试验,验证其控制效果。
1 恒张力控制系统设计
1.1 张力控制方式的选择
铺丝机恒张力送丝控制系统采用由电动机控制纤维丝的方式,通过张力检测装置把张力大小的信号反馈给控制单元,再由控制单元控制电动机的转速或者输出力矩,使纤维丝的张力大小稳定在要求的范围之内[4]。其中,微控制器作为下位机,工控机作为上位机,通过彼此的通讯达到保持张力稳定的目的。
1.2 控制系统主要组成部件的选择
由于纤维丝张力在10 N以内的复材成型效果最好,故选用量程为10 N的电阻应变式张力传感器作为测量模块,以提高控制系统精度。同时,采用STM32单片机芯片作为控制单元,其性能高,功耗低且外设资源十分丰富,其自带的A/D转换功能为系统开发带来极大便利。系统的调速电机与收丝电机选用直流无刷电机,以满足输出转矩和转速的平稳性要求。
1.3 控制系统总体方案
恒张力控制系统总体方案如图1所示。由于系统中测量模块采集的电信号较弱,达不到STM32芯片的电平采集要求,因此需要采用处理电路将微电信号转化为微控制器可以读取的范围。STM32芯片把接收到的电平信号与设定值作比较,比较差值和差值变化率将作为PID控制器的输入量,输出量控制PWM波的占空比,改变电机转速,达到张力恒定的目的。
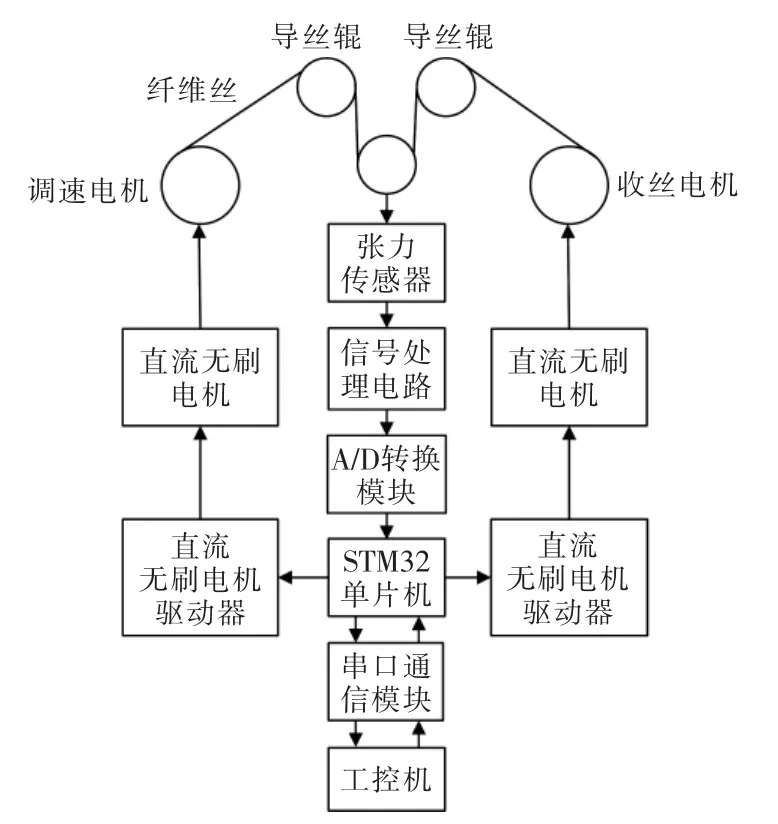
图1 恒张力控制系统整体结构Fig.1 Structure of overall constant tension control system
2 控制系统数学模型的建立
(1)纤维丝张力的传递函数
张力产生机理如图2所示。

图2 张力产生机理Fig.2 Tension generation mechanism
根据胡克定律,纤维丝的张力为[5]

式中:E为纤维丝弹性模量;A为纤维丝截面积;L为纤维丝原始长度;L0控制系统调整后纤维丝长度。
将式(1)对纤维丝通过两轮的时间t进行积分,可得

式中:ω1和ω2为两轮转速;r1和r2为两轮半径。
对式(2)进行拉氏变换,最终处理后可得纤维丝张力的传递函数为

(2)张力检测模块的传递函数
根据电阻应变式张力传感器的工作原理,可以得到其传递函数为

式中:k1为单片机ADC电压转换范围与张力传感器测力范围的比值。
(3)直流无刷电机的传递函数
控制系统采用三相六状态的直流无刷电机,当电机处于星型连接状态时,其电压方程可以简化为[6]

式中:Ua,Ub,Uc为三相定子相电压;Ra,Rb,Rc为三相定子之间相电阻;ia,ib,ic为三相定子之间相电流;L为各绕组自感;M为各绕组互感;ea,eb,ec为三相定子反电动势;μN为电机中性点电压。
当a相与b相导通时,将系统转矩方程代入电压方程中,再进行拉氏变换,并引入电磁时间常数Td和机械时间常数Tm,最终可得直流无刷电机的传递函数,即

(4)系统总体开环传递函数
整个控制系统的传递函数结构如图3。
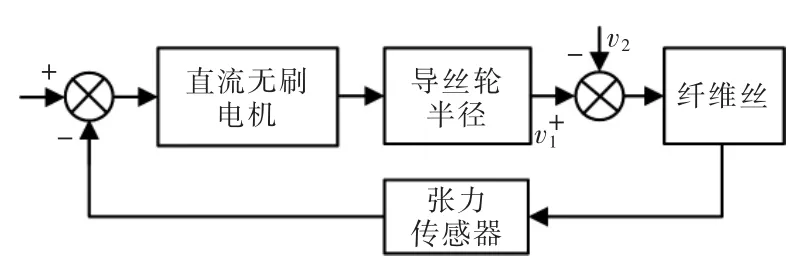
图3 系统传递函数结构Fig.3 Structure of system transfer function
因此该闭环系统的开环传递函数为

代入电机参数、纤维丝参数以及调速轮直径,得

3 模糊控制器设计
3.1 模糊控制器的基本原理
铺丝机恒张力送丝控制系统为非线性、时变系统,对控制的实时性要求很高。传统的数字PID自适应能力差,很难满足系统要求。在此,将模糊控制系统与PID控制算法结合,引入模糊PID控制算法对该系统进行实时控制。模糊PID控制器原理如图4所示。
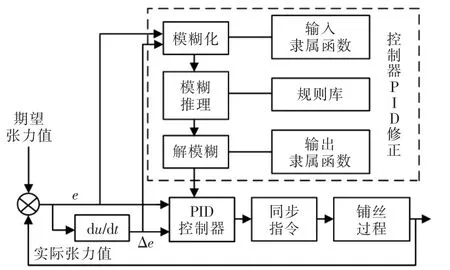
图4 模糊PID控制器原理Fig.4 Fuzzy PID controller schematic
模糊自适应PID控制器原理是以送丝控制系统的偏差e与偏差变化率Δe为输入变量,经过模糊化处理,根据规则库的选定进行模糊推理,最后解模糊,输出PID参数的调节量ΔKp,ΔKi以及ΔKd,从而得到最适合当前系统状态的PID输出量Kp+ΔKp,Ki+ΔKi,Kd+ΔKd来控制电机转速, 达到控制纤维丝张力恒定的目的。
3.2 模糊化处理运算
3.2.1 模糊子集的选定
该系统的张力传感器最大量程为10 N,用7个词汇来描述模糊子集,相当于进行7层分级,即{负大,负中,负小,零,正小,正中,正大},用字母表示为{NB,NM,NS,ZO,PS,PM,PB}。
定义e和 Δe的论域为{-2,-1.25,-0.75,0,0.75,1.25,2};ΔKp,ΔKi和 ΔKd的 论 域 分 别 为[-5,5],[-0.5,0.5]和[-1.5,1.5]。
3.2.2 量化因子和比例因子的确定
为了将精确量的偏差以及偏差变化率转换到所设定的模糊子集的论域,需要引入量化因子。同理,解模糊过程中,要将模糊量转换为精确量,量化因子与比例因子为

式中:n,l均为选定论域的边界值;Ke=100;KΔe=50;Kpid=1。
3.2.3 隶属度函数的选定
隶属度类似于概率的概念,表示数值相对设定值概率的大小。该控制系统e和Δe在两端选择S函数,而模糊输出量 ΔKp,ΔKi和 ΔKd选择三角函数。
3.3 模糊规则的建立
模糊规则对模糊控制系统控制效果影响很大。恒张力送丝控制系统模糊规则见表1。
3.4 模糊推理和解模糊
根据设定的模糊规则,利用MatLab可以得到模糊推理的三维示意,如图5所示。
经过模糊推理后,模糊PID控制器需要进行去模糊化处理,取得精确量再乘以相应的比例因子以计算实际的输出控制量。该系统采用加权平均法作为解模糊方法[7]。MatLab可以自动生成输出变量的模糊控制查询表,将模糊控制查询表以数组的形式保存在单片机中,以便单片机自动查询。
4 Simulink仿真分析
Simulink是MatLab中的一种仿真环境,针对恒张力送丝控制系统的模糊控制,可以利用模糊逻辑工具箱中的模糊逻辑控制器模块搭建简易模糊PID系统,并进行仿真[8]。
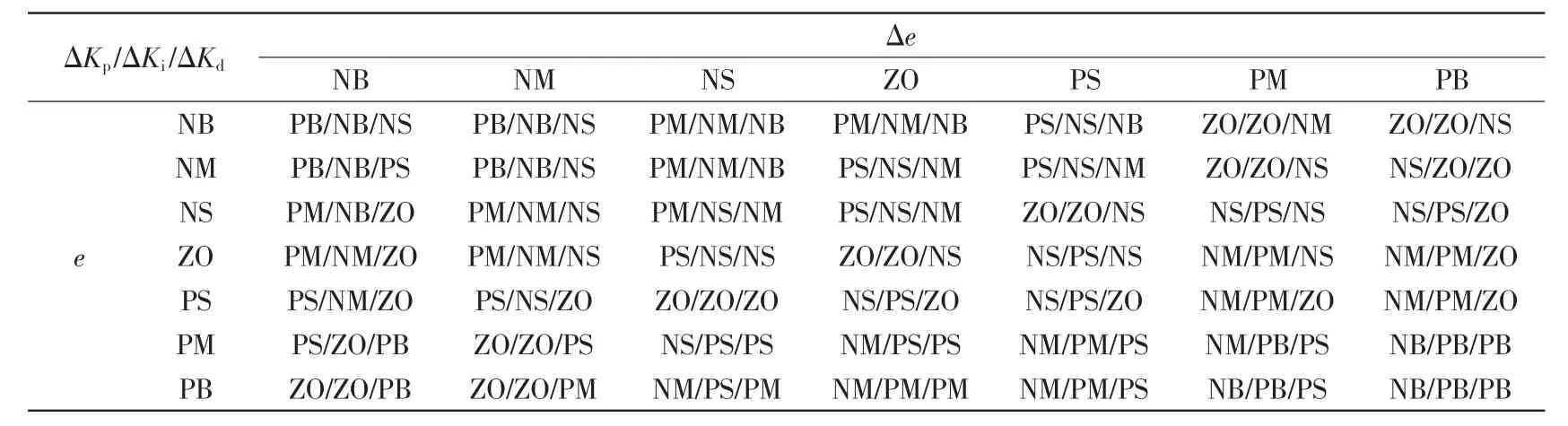
表 1 ΔKp,ΔKi和 ΔKd模糊规则Tab.1 Fuzzy rules of ΔKp,ΔKiand ΔKd

图5 模糊推理三维示意Fig.5 Three dimensional schematic of fuzzy reasoning
如图6所示,将模糊控制器保存放入Simulink中,模糊自适应PID控制器输出的ΔKp,ΔKi和ΔKd最后会与初始设定的PID参数进行整合输出,进而控制微控制器中的占空比来改变输出PWM波大小。

图6 模糊PID子系统Fig.6 Fuzzy PID subsystem
分别对传统PID和模糊自适应PID的控制效果进行仿真,仿真性能如图7所示。由图可见,从送丝控制系统开始响应到整个系统稳定,常规PID控制需要2.2 s,而模糊PID控制仅需要1.8 s,可以更快地使系统达到稳定,而且模糊自适应系统的超调量远远小于传统PID,大大降低了在控制系统开始作用后纤维丝中张力的波动。

图7 控制效果Fig.7 Control effect
5 系统试验与分析
5.1 张力稳态测试
将张力值分别设定为2,5,8 N,并分别在送丝速度为10,15,20 m/min情况下进行试验,所得结果见表2。
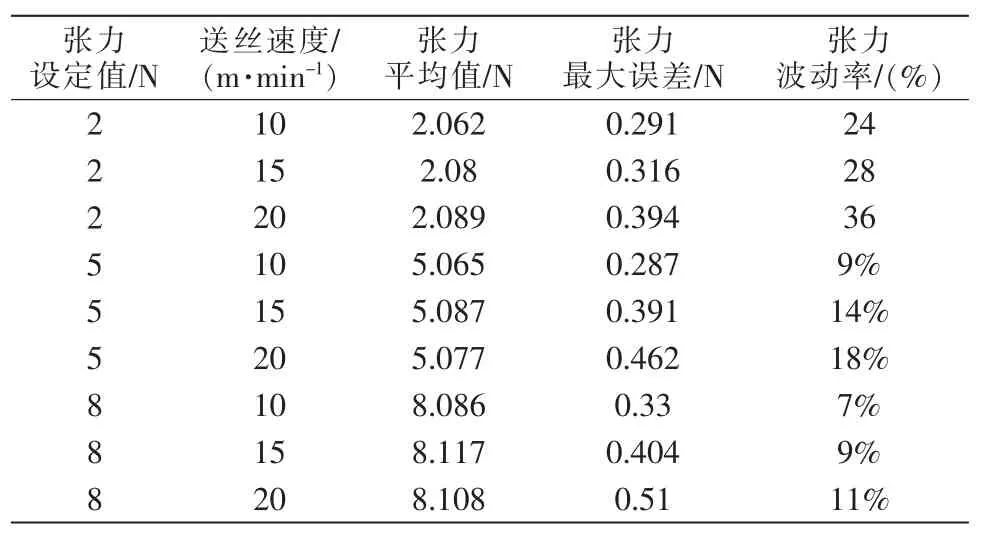
表2 张力稳态测试结果Tab.2 Test results of tension steady state
通过对系统试验结果分析可知,当张力值不变时,随着系统送丝速度的增加,张力最大误差与张力波动率持续上升,即送丝速度对系统张力值影响较大。对比3组试验,发现张力平均值始终处于一个相较于平稳的状态,随着系统设定张力值的上升,张力最大误差持续升高,波动率逐渐减小。当系统设定值在5 N时,张力波动率在20%以内;当系统设定值在8 N时,张力波动率在15%以内。张力波动率小于20%以下,说明恒张力控制效果较好。因此该系统的张力控制效果明显,基本达到要求。
5.2 张力动态测试
在铺丝机的工作过程中,铺丝机张力的大小有可能会根据要求而发生改变。因此还需进行张力动态测试试验。其控制曲线如图8所示。
当送丝速度为15 m/min时,在整个张力值发生突变的过程中,实时张力值迅速上升,正式达到5 N稳定张力的时间跨度为1.3 s,动态控制效果明显。系统稳定之后,张力最大误差以及张力波动率与稳态张力控制试验控制效果类似。
6 结语
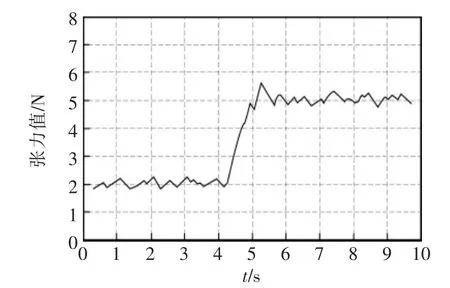
图8 张力动态测试控制曲线Fig.8 Control curve of tension dynamic test
所设计的一套完整自动铺丝机恒张力进丝系统,使用STM32单片机作为主控单元,以直流无刷电机系统的执行元件,利用电机的速度差来控制张力;建立了系统的数学模型,并通过对模糊PID控制器进行设计与仿真,说明模糊PID相较于普通PID控制的优势;搭建了试验平台,对该系统进行张力稳态与动态测试。试验结果表明,该系统满足张力稳定的要求,从而为我国自动铺丝技术的发展打下基础。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
少儿科技(2022年4期)2022-04-14
计算机仿真(2021年11期)2021-12-10
马克思主义哲学研究(2021年2期)2021-06-05
新世纪智能(高一语文)(2020年9期)2021-01-04
水泥工程(2020年4期)2020-12-18
电子制作(2019年10期)2019-06-17
