铁路汽车装载激光雷达技术应用
2018-08-29 02:29:26李可佳马欣然
铁道货运 2018年8期
胡 淦,李可佳,安 迪,李 涵,马欣然
(中国铁道科学研究院集团有限公司 运输及经济研究所,北京 100081)
1 概述
随着我国汽车产业的高速发展,铁路汽车装载技术在运输过程中越来越重要。然而,由于铁路汽车装载过程中仍然采用人工指挥或导引设备进行引导的手段,司机视线可能会存在盲区,特别是在装载大型车辆时,对准和调整汽车位置的引导方式难度高,存在时间长、效率低、安全隐患大等问题,我国目前也还没有成熟的辅助系统应用于汽车的铁路装载作业。
激光雷达是激光、大气光学、雷达、光机电一体化和电算等技术相结合的产物,以激光为光源,通过探测激光与被探测物之间相互作用的光波信号来遥感测量[1-2],其本质是高速旋转的激光测距仪由电机带动激光测距仪以一定频率旋转,使得激光雷达能够获取其旋转平面内多个离散点的距离数据,从而获得自身位置与周围物体的相对位置信息[3-4]。无论白天黑夜,激光雷达均能够探测远距离的目标,不受雾、云和雨的阻挡,具有全天候、全天时的特点,并有一定的穿透能力[5]。激光雷达的有效扫描区域为270°,1周包含1 080束激光,角度分辨率为0.25°。在实际应用中,激光雷达的扫描盲区为垂直上方90°区域,扫描区域沿垂直地面方向轴对称,激光雷达的扫描区域如图1所示。
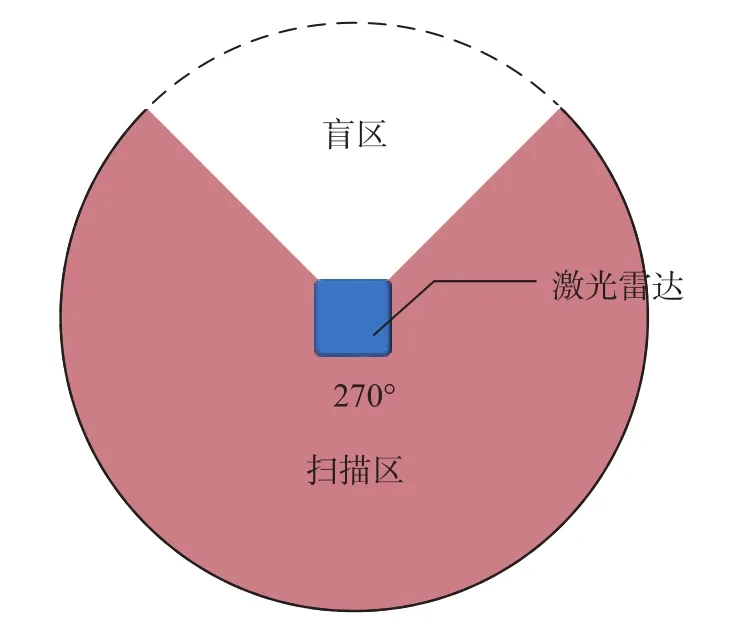
图1 激光雷达的扫描区域Fig.1 Laser radar scanning area
激光雷达作为一种精度高、反应灵敏、稳定性强的测距传感器,能够为铁路汽车装载导引设备提供实时、准确的车辆位置信息,辅助司机完成铁路汽车装载作业。因此,提出一种基于激光雷达技术的车辆辅助引导系统及激光雷达检测算法,通过该算法可以对激光雷达测距数据进行处理,获取相应待测边界距离值,以适用于铁路汽车装载中的定位导航,辅助司机实施装载,提高铁路装载效率和安全性。
2 车辆辅助引导系统构成
铁路上采用平车作为汽车的运输工具,以渡板作为辅助工具,装车人员驾驶汽车通过渡板,直接停在平车上[6-7]。在实际装车过程中,需要多人在旁边指挥、测量和反复调整,装载效率低。遇到恶劣天气或者夜间装车时,装车人员短时间内无法对准位置,严重影响汽车装载及运输效率[8-9]。
车辆辅助引导系统将激光雷达技术应用于铁路汽车装载,并将激光雷达垂直固定在被装载车辆的车头中心位置,其转动平面与平车平面垂直相交。借助激光雷达的测量数据,可以实时获取激光雷达相对平车的位置和偏离信息,配合摄像头图像为装车人员提供准确全面的车辆位置和偏差信息,从而代替人力辅助装车人员完成汽车装载作业,车辆辅助引导系统工作示意图如图2所示。
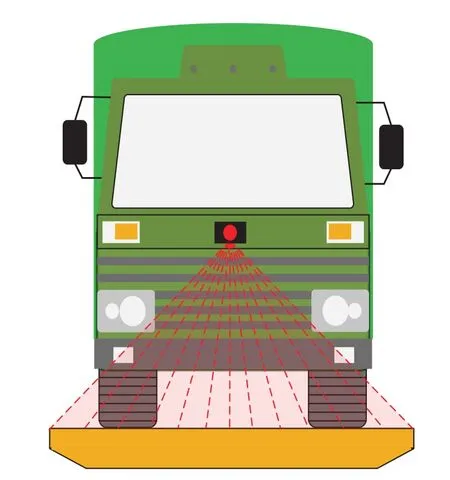
图2 车辆辅助引导系统工作示意图Fig.2 Working diagram of guide system
车辆辅助引导系统包括激光雷达测距传感器、视频监控器、无线模块、电源、电器箱和平板电脑。激光雷达测距传感器、视频监控器、无线模块和电源均安装在电器箱内,电器箱固定在车辆前端或尾部中心处,其转动平面与平车地板垂直相交。电器箱尺寸小、重量轻、方便携带、随用随装。平板电脑放置于汽车内,为司机提供车辆和平车的相对位置信息,并发出操作提醒。车辆辅助引导系统的激光雷达测距传感器用于测量车辆与平车边界之间的距离;无线模块将激光雷达采集的数据传输到数据处理模块;视频监控器为司机提供车辆前方的实时图像;电源给激光雷达测距传感器、视频监控器、无线模块供电。在该系统中,激光雷达测量数据在经过微机处理后,可以得到偏移量,并通过无线的方式传输到车内的液晶显示屏上,为汽车驾驶员提供偏移提示,辅助司机完成汽车装载作业。
3 激光雷达检测算法
为获得激光雷达位置偏离信息,需要确定激光雷达高度H、激光雷达到平车两边距离L1和L2,以及偏角β。平车边界存在跳变测量信息,通过激光雷达检测算法可以识别跳变测量信息,得到平车两边边界处的测量点,相应测量点的距离数据即为激光雷达距离平车两边界的直线距离。激光雷达测量断面如图3所示。
(1)确定H。激光雷达的扫描分辨率为0.25°,每扫描1周会发出1 080束激光,得到1 080个数据点。扫描平车截面时,根据激光雷达不同高度,约有400 ~ 600束激光会落在平车上,这些激光的测量值即为激光雷达与平车相应位置的距离,返回数据的最小值即为激光雷达距离平车的最短距离H。
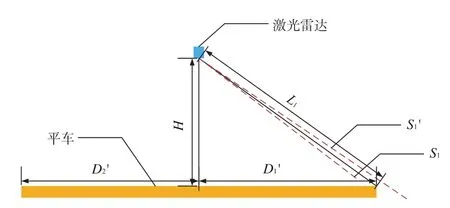
图3 激光雷达测量断面Fig.3 Laser radar measuring section
(2)确定L1,L2值。在车辆辅助引导系统的算法中,判定出平车边界,即可确定L1,L2。S1和为相邻2束激光,由激光雷达分辨率可知2束激光夹角为0.25°,其中S1打在平车上,超出了平车边界。通过分析2束激光的返回值,可知S1到的测量数据是跳变的,因而可以判定平车边界夹在2束激光之间。依据测量结果,将S1的测量值视为L1,同理可得L2。当激光雷达位于平车中心线上时L1=L2。已知L1,L2和H,即可根据勾股定理求得平车两端距离,。
(3)测量偏角β。车辆偏转会对测量结果产生较大影响,当偏转角度为β时,实测偏离量为实际偏离量的倍,因而需要求出偏角β进行修正。偏角β示意图如图4所示。
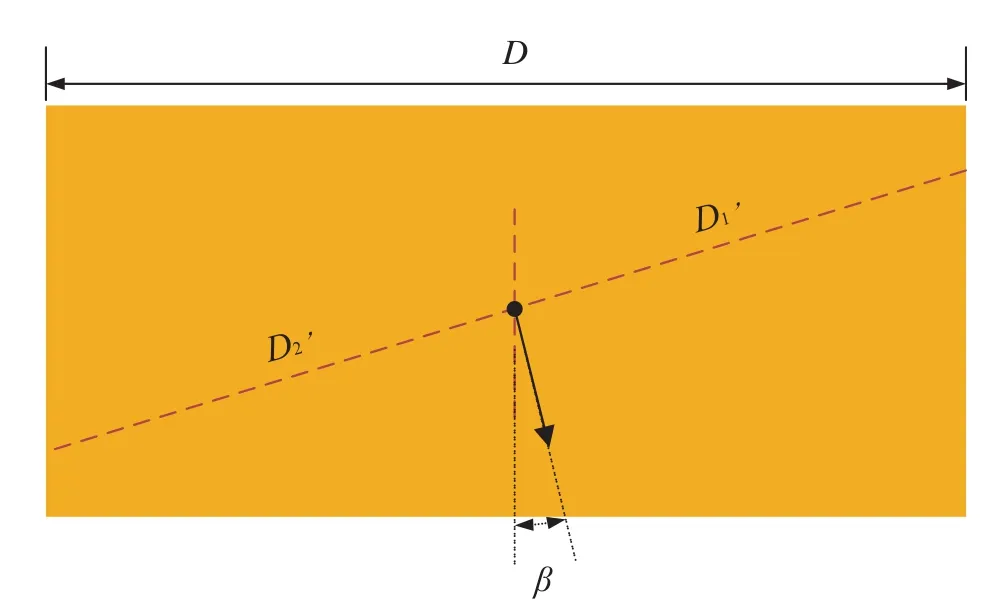
图4 偏角β示意图Fig.4 Angle beta diagram
平车宽度为D,箭头起点为激光雷达所在位置,箭头指向为车辆行驶方向。此时,车辆行驶方向偏离平车中心线β角度,计算公式为

(4)计算偏离量。根据已知数据H,L1,L2,β,即可求得偏离量ΔD,计算公式为
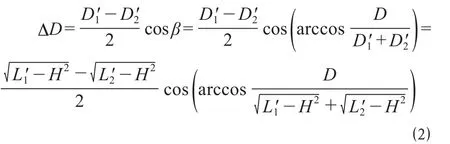
综上可知,偏离量求解流程如图5所示。

图5 偏离量求解流程Fig.5 Deviation calculation process
4 误差矫正与实验分析
偏离量ΔD为随机误差,其大小和正负都不确定,但在大量重复测量实验中服从一定统计规律。误差具有对称性、单峰性、有界性和抵偿性的特点,即理论上大小相等的正负误差出现的概率相等,小误差出现的概率大,大误差出现的概率小,最大误差有极限,并且随着测量次数增加,误差代数和趋于零。误差不可避免,但消除小概率出现的大误差对提高测量精度至关重要。
4.1 误差矫正方法
基于误差特征,选取以下4种方法对测量数据进行优化处理。
(1)平均数法。即不做筛选,整体取平均。由前文分析可知,数据误差的类型主要是随机误差,随机误差具有对称性,即在数据量足够大时,绝对值相等的正负误差概率相等,所有误差的加和接近于零。因此,理论上经过平均数法处理后的误差会大大减小。
(2)投票法。对每组数据分别去掉3个最大值和最小值后取平均,得到最终数据。投票法相当于在取平均数法的基础上去掉异常数据。
(3)中位数法。该方法依据随机误差的对称性,当数据量足够大时,理论上中位数的误差应趋于零,通过选取中位数的方法就可以有效避免误差。
(4) 正态分布法。依据正态分布的性质,待处理数据中数值分布在 (μ-σ,μ+σ)中的概率为 65.26% ;数值分布在 (μ- 2σ,μ+ 2σ)中的概率为 95.44% ;数值分布在 (μ- 3σ,μ+ 3σ)中的概率为 99.74%。选取(μ-σ,μ+σ)内的数据进行平均处理,筛除区间外的数据,结果表明该方法可以剔除极值点,避免误差。
4.2 实验结果分析
实验选取3个位置,分别运行平均数法、投票法、中位数法、正态分布法4种算法进行测定,其中3个位置分别为平车中心线、平车中心线左偏50 mm、平车中心线右偏100 mm。每组实验选取200个数据进行分析,平车中心线偏左的数据为正值,偏右的数据为负值,得出测定平均值、误差平均值和标准差的实验结果比较如表1所示。
误差平均值可以反映数据精度,标准差可以反映数据离散程度。由表1可知,运行不同算法时,各组误差平均值、标准差均无明显差距,误差平均值基本在(-1.5 mm,3 mm)之间波动,即经过算法处理后,测量精确度可以达到毫米级别,基本满足应用需求。
取3组实验数据误差平均值和标准差平均值,得到3组实验取平均结果如表2所示。
由表2可知,正态分布法的平均误差最大;中位数法的平均误差最小,精确度最高,但其平均标准差最大,数据稳定性差;投票法的平均标准差最小,精度也较优。车辆辅助引导系统在户外的实际应用中,会遇到更加复杂的情况,因而对数据稳定性的要求相对更高。因此,选取投票法作为车辆辅助引导系统的最终算法。
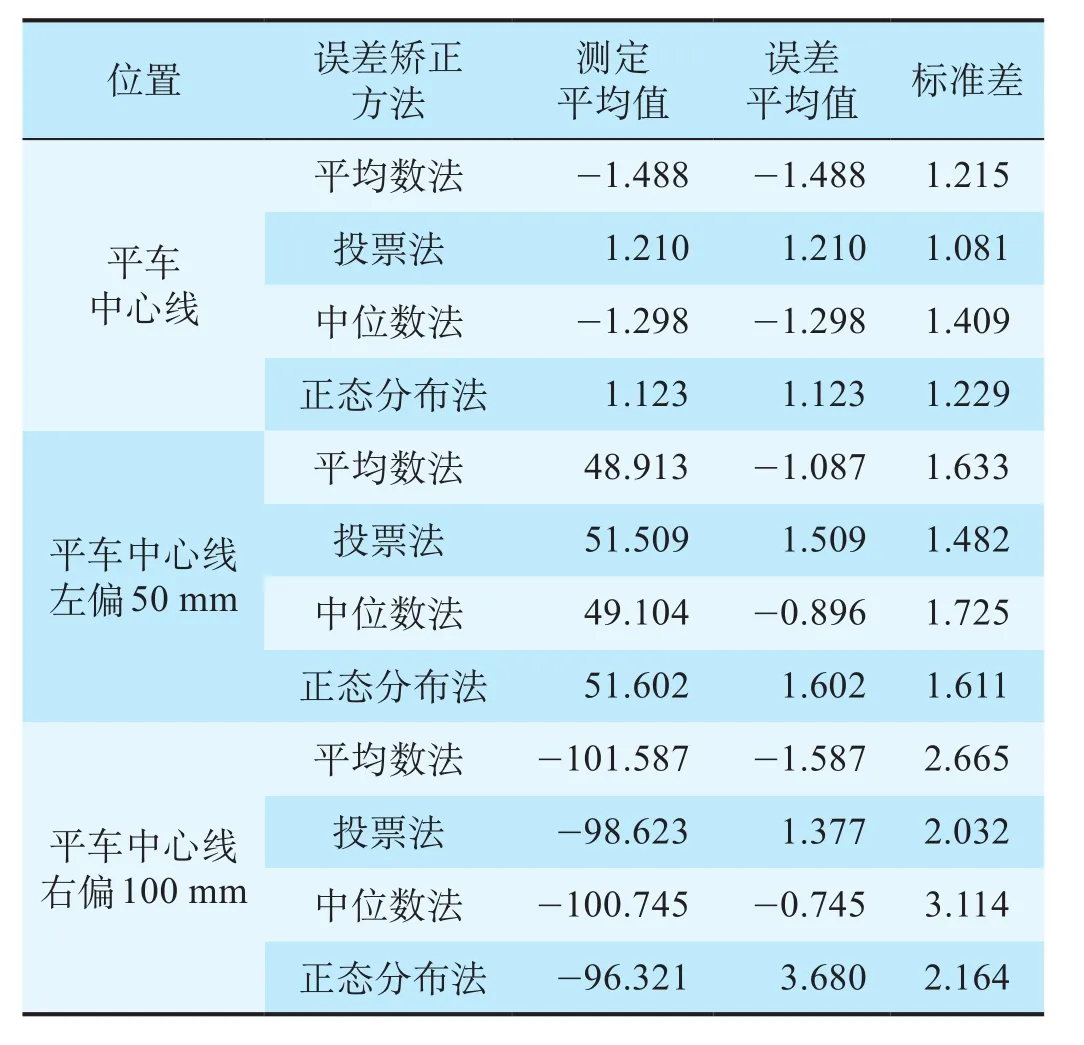
表1 实验结果比较 mmTab.1 Comparison of experimental results
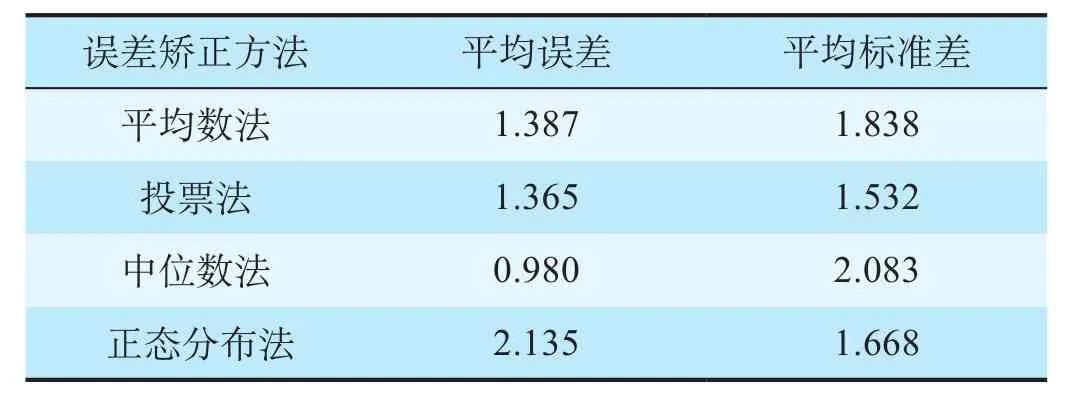
表2 3组实验取平均结果 mmTab.2 Average of 3 groups of experiments
5 结束语
基于激光雷达技术的车辆辅助引导系统能够为司机实时提供汽车相对平车边界的位置,在一定程度上可以增强铁路汽车装载的灵活性,保证装载过程中的人员与设备安全,有效提升铁路汽车运输服务质量,提高装车效率。通过实验证明,采用车辆辅助引导系统和激光雷达检测算法后,车辆引导的可靠性、精确度得以提高,不仅满足了汽车在铁路装载中的定位引导需求,有效节省时间,还节约了人力,减少安全隐患。随着无人驾驶和室外机器人的飞速发展,激光雷达技术也越来越成熟,在满足技术标准的前提下应进一步研究降低激光雷达成本,增强产品竞争力。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
河北理科教学研究(2021年3期)2022-01-18 05:34:24
商品与质量(2021年27期)2021-11-23 13:37:34
发明与创新(2021年39期)2021-11-05 07:15:28
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
材料科学与工程学报(2016年1期)2017-01-15 13:33:48
汽车文摘(2015年11期)2015-12-02 03:02:53
机械工程师(2015年10期)2015-02-02 01:14:29