浅谈光伏平单轴跟踪器逆追踪算法
2018-08-27 10:24胡湘江
机电信息 2018年24期
胡湘江
(杭州帷盛科技有限公司,浙江杭州311106)
0 引言
随着社会的发展,能源需求越来越大。太阳能作为清洁能源,越来越受到人们的重视。光伏电站现在已经大规模投入使用,如何提高光伏电站的光电转换效能,就成为人们研究的重要课题。本文着重讨论光伏跟踪器支架如何有效提高发电量产出。
当今主流的跟踪器,有平单轴跟踪器、斜单轴跟踪器以及双轴跟踪器。所采用的跟踪算法各异,下面着重谈谈采用天文算法的跟踪技术。知道项目地的经纬度信息、真太阳时,使用天文算法,计算出太阳的高度角和方位角,调节跟踪器到需要的角度,即可实时跟踪太阳。同理,也可以根据天文算法计算出最佳无阴影遮挡角度,使平单轴反向转动,让后一排光伏组件避开前一排组件的阴影遮挡,我们称之为“逆追踪”。
下面简单谈谈算法:
1 基本术语及符号
因为文章篇幅有限,这里仅作简单定义:
α——太阳方位角(-180°~+180°)(参照图1,太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正南方向的夹角);
h——太 阳 高 度 角(0~90°)(参照图1,指太阳光的入射方向和地平面之间的夹角);
φ——纬度;
γ——经度;
t——当地时(小时);
T——北京时(小时,保留两位小数);
n——自元旦日开始天数(自1月1日开始为1,2,3,…);
δ——赤纬角,表明季节(日期)的变化;
ω——时角,表明时间的变化,当地时间12:00时的时角为0,前后每隔1 h,增加360/24=15;
B——平单轴跟踪器南北主轴与太阳夹角(参照图2);
A——平单轴跟踪角。
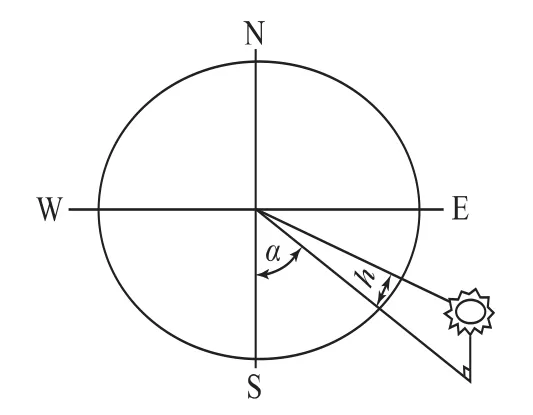
图1 太阳高度角和方位角
2 基本计算公式
根据经度计算当地时间:

从而得到时角:
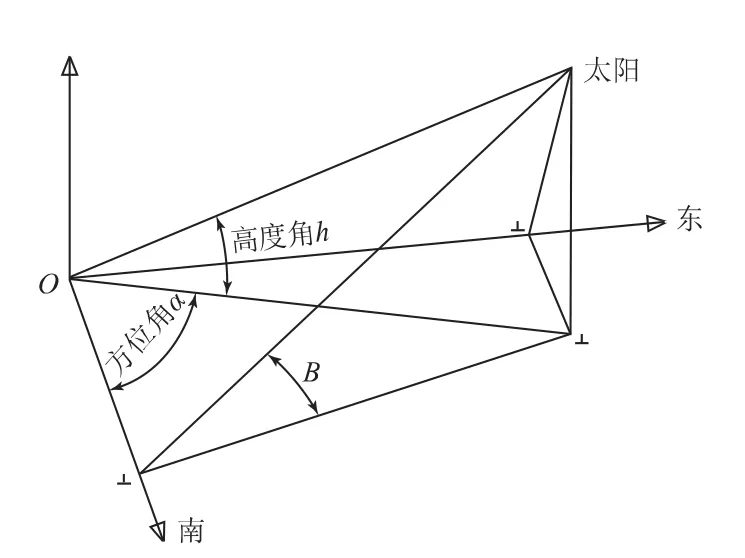
图2 平单轴跟踪器南北主轴与太阳夹角B

计算当日的赤纬角:

计算太阳高度角:

计算太阳方位角:
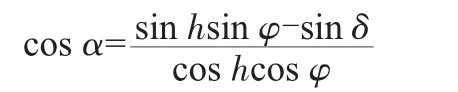
注:据此公式算出的角度为0~180°,再据时间判断正负。计算夹角B:
得到夹角B,从而我们可以推算出此时需要的跟踪角A。
3 正常跟踪
正常跟踪时,跟踪器上的组件跟随着太阳运行轨迹变化运动。运行基本原理是确保组件在东西方向上跟太阳光线成直角。跟踪角A和夹角B恒有以下关系:A+B=90°,此时可以得到公式:A=90°-B。
在实际控制中,可以先通过各种传感器检测出组件当前角度A(S),再计算此时正常跟踪角度A,然后计算偏差量e(t),根据得到的偏差值,驱动执行机构调整偏差量到目标值即可。

4 逆追踪原理
平单轴跟踪器如果实时跟着太阳追踪,在早上或傍晚太阳高度角较小的时候,前面一排组件会对后面一排产生遮挡,从而产生阴影,影响发电量(图3)。

图3 无逆追踪算法跟踪
如果有一种算法,使得早上和傍晚的时候,组件能够反向追踪,使前排组件阴影刚好没遮到后排,实现入射角最大、发电量最大的目标,这就是逆追踪算法。
下面简介逆追踪算法:
P——东西两排跟踪器的节距;
W——组件排列的尺寸,可以一块竖排或者多块。
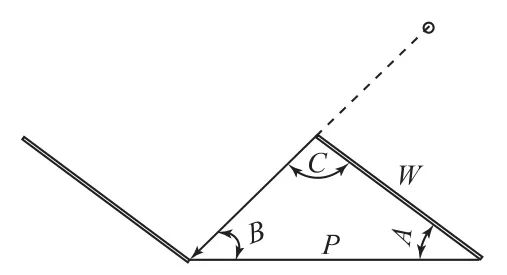
图4 有逆追踪算法跟踪
以W和P为边,当A+B=90°时,A为正常跟踪与逆追踪的临界角,此时的A临界角记录为A临。此时,随着时间的推移,A逐步增大,C逐渐从直角增大,转变为钝角(图4)。
比较A与A临,A<A临时,正常跟踪;A>A临时,开始逆追踪。逆追踪角计算如下:
此时计算出A反后,根据e(t)=A(S)-A反计算偏差值,驱动执行机构调整偏差量,即可完成逆追踪进程。
5 结语
据测算,早上和傍晚采用逆追踪算法在同等条件下可提高1%~3%的发电量;并且可以有效缩小占地面积,提高土地利用率(GCR),降低土地使用成本。所以利用好逆追踪技术,是提高跟踪器厂家竞争力的有效手段之一。
猜你喜欢
结构工程师(2022年2期)2022-07-15
太阳能(2022年3期)2022-03-29
水泵技术(2021年6期)2021-01-26
空间科学学报(2020年4期)2020-04-22
太阳能(2020年3期)2020-04-08
中国煤炭(2020年2期)2020-01-21
当代工人·精品C(2019年2期)2019-05-10
现代计算机(2018年19期)2018-08-01
计算机应用与软件(2017年7期)2017-08-12
中学生数理化·七年级数学人教版(2017年1期)2017-03-25