
液体摆电容倾角传感器及动态水平平台控制设计
2018-08-22 09:09杨立陈湘萍
新型工业化 2018年7期
杨立,陈湘萍
(贵州大学电气工程学院,贵州 贵阳 550025)
0 引言
在检测和自动控制技术快速发展的今天,传感技术的发展也随之达到了一个新的高度[1-3]。由于整个社会正逐渐趋向于智能化,而传感器能代替人类的所有感官且对外界的检测比人更为精准,所以其无疑就成为了国内外专家学者研究的焦点。在我们身边,传感器的身影已是无处不在。而倾角传感器在我们生活中各方面的应用也越来越多[4-8],本文所介绍的液体摆电容倾角传感器是电容式传感器的一种,结构较为简单,是一种通过改变介质与传感器的接触面积来改变电容值的电容传感器。所以它的灵敏度相较于其它传感器会高一些。此外,由于该传感器两极板间没有接触,所以相应的机械损失也就比较小。因此,液体摆电容倾角传感器必将是非常有前景的传感器之一。但是,由于它存在的一些缺点和问题:如存在寄生电容和用不同的方法测量时其输出可能是非线性等,这就会影响到它的稳定性和实用性,所以在使用该传感器时需要采取一定的调理措施。本文设计了一种液体摆电容倾角传感器结构,并建立一个动态水平平台控制系统。使平台一旦倾斜以后,传感器立即响应并测出倾斜角度值和倾斜方向并在液晶显示器上显示该数字和方向,同时直流电机能够在单片机的控制下驱动连接在其一端的涡轮蜗杆调节螺杆上下移动从而达到实时调节平台水平的目的。
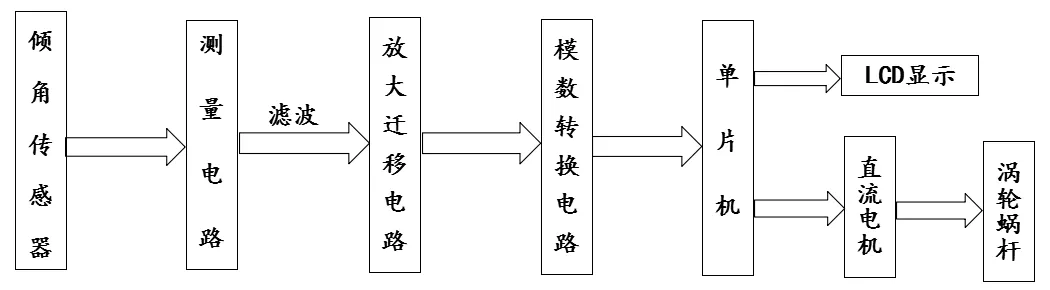
图1 系统整体框图Fig.1 System block diagram
1 整体设计方案
整体框图如图1所示。整个系统主要由传感器模块、信号调理电路、模数转换电路、单片机控制系统组成。将液体摆电容倾角传感器安装在平台上,如果平台发生倾斜,此时会改变倾角传感器的电容值。再通过信号调理电路和模数转换电路就可以将该电容值转化为平台的倾斜角度的数字量。然后将该数字量送入单片机控制系统及时将平台调平,并在LCD上显示此次的倾角信息。
2 液体摆电容倾角传感器结构[9]
如图2所示,传感器由两片圆形电极板和一个圆形密封圈组成。一片电极板作为静极板,引出线接地,另一片电极板均分成2个可变静极板,组成了一个差动式结构。极板表面用聚氯乙烯薄膜覆盖,作为电介质使液体与电容极板实现电隔离。当传感器旋转时,一边的静电极板浸在液体中的面积减小,另一边的静电极板浸在液体中的面积增大。由于封入的介电常数比气体的高,因此,液面的流动造成电容发生变化,据此可测出倾斜角。
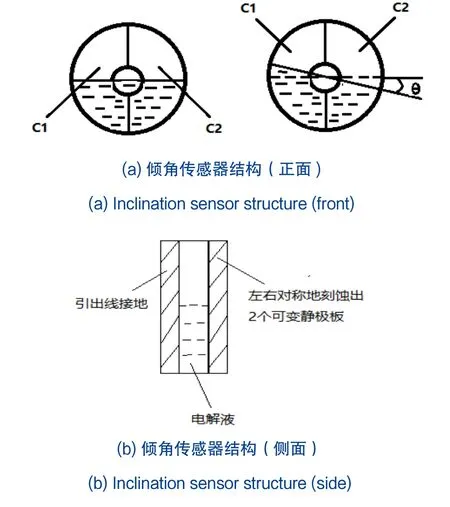
图2 倾角传感器结构Fig.2 Inclination sensor structure
如图2所示,设半圆形面积为S,水平状态时有:

当有倾角时:

式中为S圆形极板的面积,d为覆铜板间的距离,ε0为真空的介电常数,εrk为空气的相对介电常数,εry为电介液的相对介电常数。
由式(3)可以看出,倾斜角与两极板间电容的变化量成正比,即测出电容的变化量就可以得出倾斜角度的变化量。
3 系统硬件设计
由于电容传感器的电容值一般在几皮法至几十皮法之间,如此微小的电容是很难通过仪器来直接显示。此外由于电容太小,相对来说在数据传输时如果稍稍有点干扰的话,传输数据就非常不准确了。这就需要用一个较为合适的测量电路来测出这个微小的电容值,并把电容值转换为和它有线性关系的其它电信号。
3.1 信号采集电路
本设计选择了差动脉冲宽度调制电路对倾角传感器的信号进行采集。如图3所示,差动脉冲宽度调制电路[10]由两个比较器A1和A2,一个双稳态触发器及两个电容充、放电回路组成。C1和C2是液体摆电容倾角传感器的差动电容。双稳态触发器的两个输出端A、B作为该电路的输出。当电源接通时,双稳态触发器的两个输出端一端为高电平另一端为低电平。其中一个电容开始充电,直至该电容阳极的电位等于参考电压UF时,相应的比较器产生一个脉冲使双稳态触发器翻转。此时,原来充电的电容开始迅速放电至零,而另一电容则开始充电,当其阳极的电位等于参考电位UF时,与之相应的比较器产生一个脉冲,使触发器又翻转一次。一直重复上述过程。这样,在双稳态触发器的输出端就产生了一组宽度受C1、C2调制的方波脉冲。

图3 差动脉冲宽度调制电路Fig.3 Differential pulse width modulation circuit
当充电电阻 R1= R2= R 时,电路的输出为:

式中U0为差动脉冲宽度调制电路的输出直流电压;U1为触发器输出高电平。
由于C0和U1的值是确定不变的,所以输出电压U0与电极板间电容的变化量∆C成正比。又因为θ∝∆C,所以 θ∝U0。所以说,此时倾角就可以通过测量输出电压的大小来测得了。
在信号调理电路中,需要把-5°~+5°的角度变化量转换成0~5V的电压信号。

式中,UAP为A点的电压平均值。由上式可知,对地输出电压与电容的变化量∆C还是成正比。所以在信号调理电路中,只需要采取对地输出就可以了。
经过信号调理电路,就把-90°~+90°的角度变化量转换成0~5 V的标准电压信号了,所以当电容水平时,输出电压为2.5 V,相应地-90°~ 0°对应的是 0 ~2.5 V, 0°~ +90°对应的是2.5~5 V。然而,在本设计中要求的测量范围为-5°~+5°。所以还需要对该输出信号做进一步的调整。
3.2 电平放大、迁移电路

放大电路:

迁移电路:


图4 放大、迁移电路Fig.4 Amplifier, migration circuit
3.3 滤波电路
因为差动脉冲宽度调制电路的输出信号一般为100 kHz~1 MHz的矩形波,且经过放大迁移后,电路中会混入不同形式的噪声,因而会影响测量精度。所以,为保证测量精度,需要用滤波电路对前级电路的输出信号进行处理。得到较为稳定的信号再送入A/D转换器进行转换。所以,在本设计中采用了RC低通滤波电路[11-13],如图5所示。

图5 滤波电路Fig.5 Filter circuit
4 软件设计
在本设计中,软件设计的目的是把经调理电路处理的传感器模拟信号进行A/D转换[14],并将转换结果送入单片机进行处理,再通过单片机控制液晶显示器显示平台倾斜角度及方向等内容,并且根据倾斜角度及倾斜方向通过驱动电路去驱动直流电机调节涡轮涡杆从而控制平台保持水平。
在A/D转换之前由于信号经前级电路的变换、放大并下迁。所以液体摆倾角电容传感器的倾角与A/D转换后的数据的关系为:

当单片机接收到A/D转换的数据后,需对所得的数据进行处理并把平台的平衡信息显示在LCD显示屏上,然后判断平台是否倾斜,如果是则通过平台调整的执行机构将平台调平。平台调整的执行机构由直流电机和涡轮蜗杆及螺杆所组成。其原理为单片机根据传感器的倾角及其方向控制直流电机正反转并采用PWM的方法来控制电机的转速[15-17],此时电机带动蜗杆旋转,并将旋转角度传给涡轮,涡轮带动与之相连接在一起的螺杆上下移动以达到调节平台水平的目的。由于单片机并不能直接驱动直流电机,所以需要一个驱动电路。本文采用的是 L298芯片[18-20],该芯片是一个双H桥直流电机驱动芯片,不但可以同时驱动两个直流电机,还可以驱动一个四相电机。并且可以与单片机的Ι/O口直接相连,电路设计也比较简单。电路设计框图如图6所示。
在本设计中,选用的是一种带编码器的直流电机。当单片机检测一次当前倾角值,判断此倾角值为左倾或右倾后发出一个脉冲信号控制直流电机正转或反转,带动螺杆向上或向下运动,调节一次平台的倾斜角。第一次调解完以后,单片机再次检测判断当前倾角值和倾斜方向并控制直流电机正反转并再次检测倾斜角和方向,直到当平台水平时即倾角传感器输出电压为零时电机停止转动。单片机驱动直流电机程序框图如图7所示。
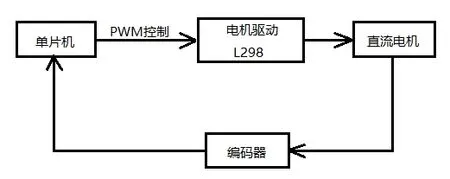
图6 直流电机控制系统框图Fig.6 Block diagram of DC motor control system

图7 驱动直流电机程序框图Fig.7 Program block diagram of driving DC motor

图8 调平平台示意图Fig.8 Flat platform diagram
5 系统测试结果
当倾角传感器的信号经信号调理电路调理后输出不同的电压时,系统测得的角度值如表1所示。从表中可以看出实际倾角值和理论倾角值相差甚小,在误差允许范围内可以忽略不计。
6 结论
本设计完成了设计所要求的性能要求和参数设定。传感器能够测量微小偏转角的值,通过标度变换使在量程在-5°~+5°之间,分辨率能达到0.1°,并且能够实现液晶显示,让单片机驱动直流电机调平水平平台。本设计的特点是能够通过测量电容的微小改变而准确的测量出倾斜角度变化从而控制直流电机调平水平平台。若结合处理速度较快的核心处理器、高精度A/D转换器及计算机数据处理技术可研发出具有实时检测功能的倾角传感器及平台调平装置,这对国内外倾角传感器的发展前景的推动具有重要意义。

表1 理论倾角与实际倾角对比Table 1 Comparison of theoretical and practical dip angles
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
今日农业(2021年19期)2021-11-27
今日农业(2020年13期)2020-08-24
电子制作(2019年10期)2019-06-17
中国洗涤用品工业(2019年4期)2019-05-11
今日农业(2019年16期)2019-01-03
电子制作(2018年14期)2018-08-21
电子制作(2017年1期)2017-05-17
电子制作(2017年10期)2017-04-18
