适用于物联网的RTK高精度卫星定位技术
2018-08-22 02:20:12
信息通信技术与政策 2018年8期
1 引言
随着以共享单车为代表的物联网应用的快速增长,除了给人们的生活带来便利外,乱停乱放时有发生,物联网的监管成为行业发展的突出问题。在这种极具代表性的应用场景下,终端的规模巨大,对于成本很敏感,要求做到低功耗,较快的定位速度,同时要适应多种场景,例如高架桥、楼宇间等。
物联网终端的定位方式也可以分为单次定位、区域定位和周期定位等。以共享单车为例,物联网终端体积较小,但停放位置多变复杂,城市中规定的单车停放区域一般不会过大,因此在依靠信息化手段进行远程监管时,就对车辆自身的定位精度提出了很高的要求。
现有常见的卫星定位技术(如手机导航和车载导航)普遍定位精度在1~10m之间,这对物联网终端来说,在特定场景下是无法满足其定位需求的(如共享单车的电子围栏入栏出栏检测),此时就需要一些高精度的卫星定位技术辅助。
2 各类高精度卫星定位技术分析
2.1 常规实时动态测量(Real-Time Kinematic,RTK)
RTK是采用GNSS相位观测值进行实时动态相对定位的技术。参考站通过数据通信链实时地把其载波相位观测值和已知的测站坐标播发给在附近工作的流动测量站。流动站根据接收到的改正数组成差分观测值进行相对定位,常规RTK组成如图1所示。

图1 常规RTK示意图
利用RTK技术可短时间内获得厘米级精度的定位结果,但存在以下不足:
(1)距离有限。
RTK是建立在流动站与参考站误差强相关假设基础上的,随着流动站离参考站间距的增加,这种误差空间相关性迅速下降,导致观测时间较长或仅得到浮点解,故RTK测量中流动站和参考站间距一般限制在15km以内。
(2)可靠性低
常规RTK中流动站坐标仅由一个参考站的改正数来辅助确定,一旦参考站处发生长时间的数据缺失(如信号遮挡、卫星异常等)、大幅度高强度电离层扰动(如太阳风暴和地磁异常)和多路径效应影响等状况,将会严重影响流动站定位结果。
(3)可用性低
常规RTK大多采用超高频(UHF)、甚高频(VHF)信号、调频(FM)电台以及无线电信标台等通讯链路进行信号播发和接收,这些信号对于通常的接收机并不具备接收和处理功能,因此一般用户还需额外购买通讯设备,使得大众用户无法承担这样的成本支出。
2.2 网络实时动态测量(Real-Tim e Kinematic,RTK)
网络RTK技术是指在一定区域均匀布设多个永久性连续运行参考站,对该地区构成网状覆盖,并利用数据通信链路把参考站实时观测值发送到主控站(数据处理中心)。主控站根据各参考站精确已知的坐标信息,对网络范围内的电离层、对流层、轨道误差等误差进行计算,实时生成改正信息,并通过无线通讯链路向用户实时连续发布,从而在用户端获得高精度实时定位精度。网络RTK主要由永久性连续运行参考站网、数据处理中心、数据通信线路及流动站用户4个部分组成(见图2)。
网络RTK中的数据通信分为两类:一类是参考站、数据处理中心和数据播发中心之间的数据通信,可通过光缆、光纤、数据通信线以及无线通信等方式实现,此类通信属于专用通信方式,在网络RTK建设过程中都需要考虑完整;另一类则是数据播发中心与流动站用户之间的通信,一般采用GSM、GPRS和CDMA等方式实现,即通过大众通信服务网络进行改正数的播发。
网络RTK从单站载波相位差分发展到采用多站进行差分结算,极大地提高了RTK的服务范围、精度和可靠性,相比上文提到的常规RTK具有以下特点:
(1)扩展了服务范围
网络RTK扩大了RTK定位的服务范围,从早期单站RTK覆盖范围(10km)发展到CORS网络的整网范围。常规单站RTK的问题是各参考站之间互不通信,导致参考站之间存在空隙,定位的质量在参考站之间不连续。而网络RTK由于实现了参考站间的互联互通和互操作,能够使用户定位质量在整个CORS网络的覆盖范围内是连续均匀的。
(2)实现资源共享
参考站之间通过通信系统可以实现数据共享,通过互联网络实现参考站数据与基准的共享。这为实现高精度连续的定位质量提供了重要保障,各参考站的互联可以使得轨道、大气等误差的估计更为可靠。
(3)可靠性
当某一个或某一些参考站出现故障时,网络RTK可以快速重新组网提供服务,即系统抵御错误的能力更强。

图2 网络RTK示意图
根据改正数发布机制的不同,可将网络RTK技术分为虚拟参考站(Virtual Reference Stations,VRS)技术、区域广播改正数(Flachen Korrektur Parameter,FKP)技术以及主辅站(Master Auxiliary Concept,MAC)技术。
●VRS技术是目前全球普及范围最广的网络RTK差分解算技术。移动用户先将概率坐标发送给数据中心,数据中心在用户附近位置创建一个虚拟参考站,然后内插得到虚拟参考站各误差源的改正值,并以RTCM格式发送给用户。用户根据数据中心发送的虚拟参考站差分改正信息或虚拟观测值进行解算得到厘米级的定位结果。由于双向无线网络通讯技术的快速发展,VRS技术日益成为网络RTK领域通用性强、操作简单、性能可靠的实施方案。
●FKP技术采用整体的网络解。它要求所有参考站将每个观测瞬间所采集的未经差分处理的同步观测值实时传输到数据中心进行实时处理,产生一个称为FKP的空间误差改正数,并将这些参数通过扩展信息发送给服务区内所有流动站进行空间位置解算。但其基本电文格式为Type59专用电文,而非标准RTCM改正数发布格式,因此在技术推广和软件应用方面存在不足。
●MAC技术是基于多基站、多系统、多频和多信号差分处理算法,是从参考站网以高度压缩的形式将所有相关的、代表整周模糊未知数水平的观测数据作为网络的改正数据波发给流动站。一般选择距离流动站最近的参考站作为主站,在一定范围内选择至少两个参考站作为辅站。主站和辅站自动组成一个单元进行网解,发送主站差分改正数和辅站与主站改正数的差值给流动站,对流动站进行加权改正,最后得到精确坐标。MAC技术是目前唯一公开的面向网络RTK的差分改正数发布标准,其改正数服务称为MAX服务,RTCM委员会己采用MAC作为RTCM 3.1格式的标准。但为支持RTCM 2.3以及3.0用户,Leica公司还提出了个性化主辅站技术(Individualized Master-auxiliary,iMax)。
表1为网络RTK技术的对比。注:3GPP在2017年8月已完成支持3种网络RTK方法(VRS、MAC、FKP),并识别出必要的RTCM消息:
——Observation message types using MSM definitions(1071-1127)。
——Station Coordinates messages(1006)。
——Receiver and Antenna Descriptors(1033)。
——GLONASS code-bias information(1230)。
——MAC Network RTK messages(1014,1017,1030,1039,1031)。
——FKPNetwork RTK messages(1034,1035)。
3 如何在物联网中大规模应用RTK
传统的RTK技术,参考站通过数据通信链实时地把其载波相位观测值和已知的测站坐标播发给在附近工作的流动测量站,进而流动测量站根据收到的改正数进行定位。传统的网络RTK技术需要流动站将自己的概略位置发送给数据中心,数据中心在收到各个参考站的观测数据后进行建模计算,然后将相应的改正数发送给流动站以进行定位计算。这些技术都是基于NTRIP、RTCM等协议实现的单播传输方法。将高精度GNSS引入移动通信网络中,为了应对不同场景,不仅支持单播改正数的播发还支持广播的方式,具体的实现参见图3。
运营商定位服务器可以从参考站获得观测值,该参考站可以为第三方参考站,也可以是基于蜂窝网络中基站进行改造升级的参考站。
在一个小区内,基站的位置可以看作为用户的概略位置,定位服务器通过部署方式或者基站上报的方式可以获得基站的位置信息。

表1 网络RTK技术的对比
定位服务器,基于获得基站的位置信息以及参考站的测量值,进行建模并产生改正数,根据应用场景的不同以单播或者广播的形式发送给终端。

图3 物联网RTK示意图
终端获取改正数后进行定位解算。
3.1 单播解决方案
单播时,主要涉及的是UE与E-SMLC(定位服务器)网元,E-SMLC和UE之间定位信令协议栈和信令流程如图4、5所示。

图4 E-SMLC和UE之间定位信令协议栈
基于移动通信网络的高精度定位单播又可分为UE-based和UE-assisted方案。主要是基于现有的LPP定位流程实现单播高精度GNSS定位。
(1)单播UE-based方案
步骤1:定位服务器接收到定位请求,获得UE的小区标识信息。
步骤2:定位服务器向UE请求能力信息,具体包括哪种定位方法,以及支持UE-based还是UE-assisted定位;收到请求消息后,UE根据自己的能力信息进行上报给服务器。
步骤3:当服务器获知,UE是UE-based的RTK(高精度GNSS)时,利用获得的参考站的辅助数据以及该小区的位置信息,生成改正数,并通过“提供辅助数据”消息将数据发送给终端。
步骤4:终端根据自己测量的信息以及从服务器获得的信息计算出精确的位置信息。
步骤5:若定位服务器请求UE的位置信息,则UE需要将位置信息上报给服务器。

图5 高精度GNSS在移动通信网中单播流程
(2)单播UE-assisted方案
步骤1:定位服务器接收到定位请求,获得UE的小区标识信息。
步骤2:定位服务器向UE请求能力信息,具体包括哪种定位方法,以及支持UE-based还是UE-assisted定位;收到请求消息后,UE根据自己的能力信息进行上报给服务器。
步骤3:当服务器获知UE是UE-assisted的RTK(高精度GNSS)时,会向UE发送位置信息请求消息。
步骤4:终端进行载波相位测量,并将测量的结果通过“提供位置信息”发送给服务器。
步骤5:定位服务器收到UE测量的信息后,进行定位解算,并把计算出的位置信息发送给终端。
单播高精度定位场景适用于当一个小区内定位UE数据较少的场景,避免浪费基站的广播资源。
3.2 广播方案
广播方案对核心网以及空口均有标准改动。定位服务器通过与基站的接口协议LPPa将数据发送给基站。基站通过空口广播给终端,E-SMLC和eNB之间定位信令协议栈如图6所示;广播时eNB与UE之间的协议栈为控制面协议栈,具体参见图7。

图6 E-SMLC和eNB之间定位信令协议栈
由于物理层对一个SIB传输的最大数据量有限制,当使用DCI1C时,物理层允许传输的最大字节数为217bytes;当使用DCI1A时,物理层允许传输的最大字节数277bytes。考虑到RTK典型数据速率是10kbit/s,因此常见数据包为1~2kbit/s,这个数据量远大于某一时刻SIB可以传输的数据量,因此为保证改正数据能够顺利通过3GPP网络架构进行传输,需要将数据进行分段进行传输。
可以用于分段的节点有两个:服务器分段:由于服务器可以提供辅助数据和对数据进行加密,因此由服务器分段可以保证数据的完整和独立性;eNB分段:基站不识别辅助数据的内容,因此如果基站分段只能进行盲分段。

图7 控制面协议栈
相比之下,服务器分段更有优势。下面以服务器分段为前提介绍核心网侧消息流程和空口侧消息流程。
(1)核心网侧(LPPa)改动方案
如图8所示,定位服务器和基站先交互用于广播基站的资源配置信息,然后定位服务器将数据发送给基站,基站再进行广播。具体步骤为:
步骤1:定位服务器向基站发送“辅助信息请求”消息,在该消息中可以携带要发送数据量的大小,或者需要 的 SIB(System Information Block)或 SI(System Information)的配置信息,如SIB或者SI的传输周期、TBS等;其中,SIB或者SI的传输周期和TBS分别用于表明请求某个SIB或者SI的传输周期值,以及允许传输的数据量大小(TBS)。在此条消息里,可以请求多个数据类型或者系统消息的配置。
步骤2:基站收到请求消息后,向服务器发送“辅助信息响应”消息。在该响应消息里可以携带多个SIB或者SI的传输周期和TBS,表示最终确定的TBS和传输周期。
步骤3:定位服务器接收到基站发送的配置消息后,定位服务器向基站发送“辅助数据传输”消息。具体的,定位服务器可以根据接收的配置消息,进行将定位辅助数据分段,并且对每个数据类型或者每个SIB包含的数据进行分段指示,如包序号以及最后一个分段指示。同时,也可以指示数据的GNSS类型,以及携带加密信息。
(2)空口侧改动方案
主要解决的是当基站收到从服务器发送的辅助数据后,以广播的方式向终端发送辅助数据。具体两种方式如下:
方式一:所有辅助数据使用一个系统消息进行广播,UE获取后将不需要的数据进行丢弃,仅使用需要的数据进行定位。
方式二:使用多个系统消息进行广播辅助数据,具体可以根据不同的数据类型使用不同的系统消息进行划分。每一种数据类型的数据可以在一个系统消息里广播,此外可以携带分段信息、GNSS类型信息以及加密信息。
使用方式二,可以使得UE只接收自己感兴趣的数据,减小了接收不必需数据而导致浪费功耗的可能性,同时也降低了时延。但是这种方式需要定义较多的系统消息类型,因此也可以在此基础上进行合并一些具有相同调度需求的IE。
当UE接收数据时,有两种方式可以用于接收分段的数据:
●UE将所有分段收集齐后,一起进行解密并处理。
●UE可以独立地解密和处理每个分段数据。
根据数据类型的不同以及应用系统的不同,两种接收数据的方式都可以支持。
基于移动通信网络的高精度定位辅助数据的播发可以实现用户在空闲态即可完成定位,同时也可以避免向多个用户以单播的方式重复发送相同辅助数据,提高了频谱效率,而且实现了不需要上报用户位置信息即可获得改正数的定位过程。
4 结束语
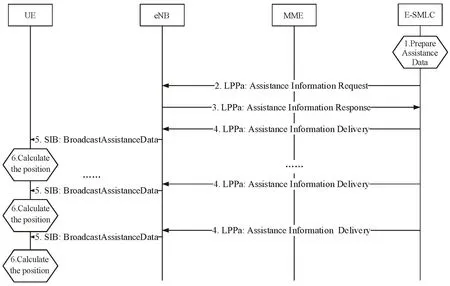
图8 LPPa数据传输流程
为保证定位精度和实时性,网络RTK技术需要及时将改正数据发送给物联网终端。现有LTE网络,从定位服务器到基站和用户是有接口和信息交互的,当定位服务器获得高精度GNSS的改正数时,是可以实现改正数在移动通信网络中进行单播和广播传输的。物联网定位对于移动通信网络来讲是一个很重要的具有商用潜能的特性,高精度RTK定位可以达到分米级甚至厘米级的定位精度,因此支持高精度GNSS定位成未来移动通信的演进趋势。
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
科普童话·学霸日记(2023年9期)2023-08-21 17:27:14
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
求学·理科版(2016年3期)2016-03-23 05:46:24
山东冶金(2015年5期)2015-12-10 03:27:41
故事家·星薇(2015年11期)2015-06-10 10:39:50
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13