
一种永磁同步电机位置控制策略
2018-08-18 08:23郑欢欢
数字技术与应用 2018年4期
郑欢欢


摘要:针对基于滑模变结构位置控制的永磁同步电机伺服系统带来定位偏差现象,提出一种利用模糊递归神经网络估计伺服系统参数上界的控制方法,该方法能够减小系统定位偏差。仿真表明,该控制策策略有效提高定位精度。
关键词:永磁同步电机;模糊递归神经网络;滑模变结构;伺服系统
中图分类号:TM46 文献标识码:A 文章编号:1007-9416(2018)04-0005-03
永磁同步電机(Permanent Magnet Synchronous Motor, PMSM)具有气隙磁密高、转矩惯量比大、响应速度快等优点,广泛应用于高精度的中小容量交流伺服系统[1]。由于PMSM是一个非线性、多变量系统,常规控制器容易受电机参数变化和外部负载扰动等不确定性因素的影响,无法很好地兼顾动态性能和抗扰性能[2-5]。目前已有的基于线性模式的消除不确定因素方法,鲁棒性难以得到保证[2]。针对限制滑模控制器应用的系统不确定性(包括参数不确定性和外部扰动)的上界参数的估计,如果通过准确地估计系统参数和外部扰动不确定性上界,系统的偏差题能够很好地抑制。
本文提出一种基于神经网络的自适应滑模变结构控制策略,该控制方法通过对模糊递归神经网络对系统不确定性参数的上界的快速估计,从而减小了定位的偏差,并提高了系统动态响应速度。
1 永磁同步电机数学模型
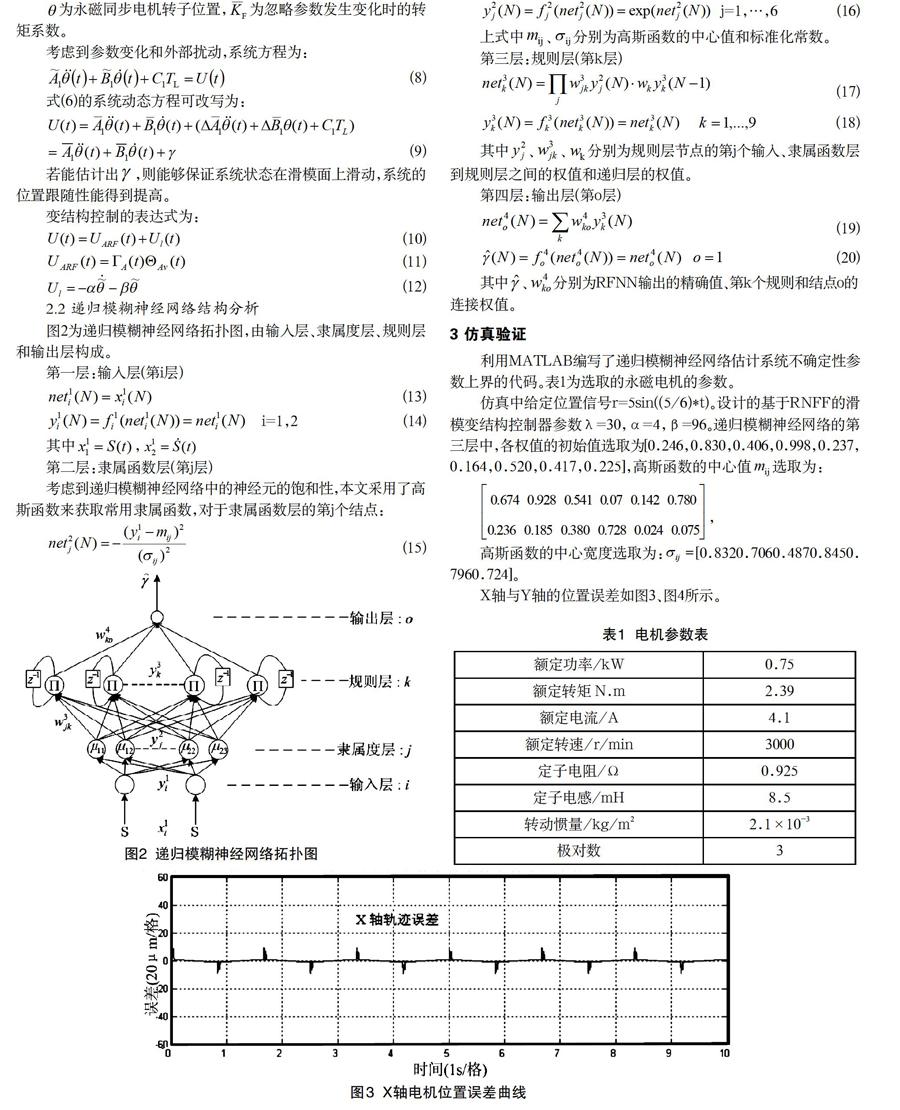
X轴与Y轴的位置误差如图3、图4所示。
从图3,图4可见,应用基于递归模糊神经网络的变结构控制器在稳态时位置误差几乎为零,而在反向时最大有10μm以内的误差。
4 结语
针对基于滑模变结构控制的永磁同步电机伺服系统参数上界不确定性(包括参数不确定性和外部扰动)带来的定位偏差问题,提出了一种利用模糊递归神经网络来快速估计系统不确定性参数的上界的方法。仿真及实验结果表明:所提出的的控制策略具有较快的收敛速度和较好的鲁棒性,能够有效提高定位精度。
参考文献
[1]王丽梅,郑建芬,郭庆鼎基于载波注入的凸极永磁同步电动机无传感器控制[J].电机与控制学报,2005,9(4):333-336.
[2]乔维德.基于免疫遗传模糊神经网络的永磁同步电机控制[J].电气传动,2008,38(05):18-21.
[3]逄海萍,刘成菊,江姝妍.永磁同步电机交流伺服系统的滑模模糊控制[J].电机与控制学报,2006,10(6),576-584.
[4]刘治钢,王军政,赵江波.永磁同步电机神经网络自适应滑模控制器设计[J].电机与控制学报,2009,13(2):290-294.
[5]Mon Y J, Lin C M. Supervisory recurrent fuzzy network guidance law design for automats underwater vehicle[J]. International Journal of Fuzzy Systems, Vol.14, No.1, March 2012.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年3期)2017-06-23
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
电子设计工程(2014年12期)2014-02-27
