多功能商品载运爬楼车的机械设计与研究
2018-08-15 02:18娄季楠张盼盼康渝佳
现代制造技术与装备 2018年7期
娄季楠 桂 伟 张盼盼 康渝佳 李 洲 李 霞
(武汉商学院 机电工程与汽车服务学院,武汉 430056)
随着互联网技术的飞速发展,网络购物越来越广泛的成为广大消费者的一种购物模式。但是,由于我国发展现状和其他方面的原因,大多数低于七层的普通居民楼还没有安装电梯,居民及送货员上下楼搬运货物很不方便。大量网购商品的派送加重了送货员的劳动强度,而像电冰箱、洗衣机、空调等大件商品的搬运更加费力且不能保证商品和送货员的安全。在已有的有关爬楼机的文献中,王淑坤提出的多适应性轮履复合载物移动系统设计,于蔚然对可折叠爬楼助力小车进行了创新优化,刘柄辰设计、研究了一种新型全控式自平衡爬楼车,曹冲振仿真分析并且优化设计了曲柄摇杆式载货爬楼车的应用[1-4]。目前市场上具有爬楼功能、平台升降功能的运货车功能单一,而且所有运货车中都没有用于锁紧商品的机构,增加了搬运过程中商品从运货车上摔下的风险。因此,依据现有市场上小车的功能特点,本文提出了研究一种价格低廉,具有平台升降、商品锁紧以及机械爬楼等功能的运货小车的方案,并根据方案对多功能商品载运爬楼车进行了结构设计。
1 爬楼车传动机构设计
我国《建筑楼梯模数协调标准》规定:普通楼梯的高度为140~210mm,本设计爬楼车要能适应标准规定的楼梯尺寸范围。
1.1 基本结构组成
爬楼车主要由圆盘、圆盘座、滑槽、圆盘镶嵌短轴、摇杆、曲柄、曲柄盘、车侧板、v型皮带、四轮带轮等构成,如图1和图2所示。
1.2 机构传动过程
通过销钉螺栓将圆盘与圆盘座链接在一起,圆盘可以在销钉螺栓上自由转动,滑槽套在圆盘镶嵌短轴上,且圆盘镶嵌短轴可以自由滑动,保证圆盘能够正常传动。摇杆与曲柄通过螺栓链接,曲柄与曲柄短轴铰链接,曲柄盘套在轴承上,轴承套在阶梯轴紧固在车侧板上。曲柄盘与四轮带轮通过A24型号的V型皮带连接。通过扳动圆盘镶嵌短轴转动,短轴在滑槽中左右滑动并且带动滑槽上下旋动。然后滑槽通过销钉螺栓为轴旋转带动摇杆旋转并且传递动力,摇杆经过曲柄摇杆机构带动曲柄转动,曲柄带动曲柄盘360°旋转。曲柄盘通过V型皮带带动四轮带轮以相同的线速度旋转。
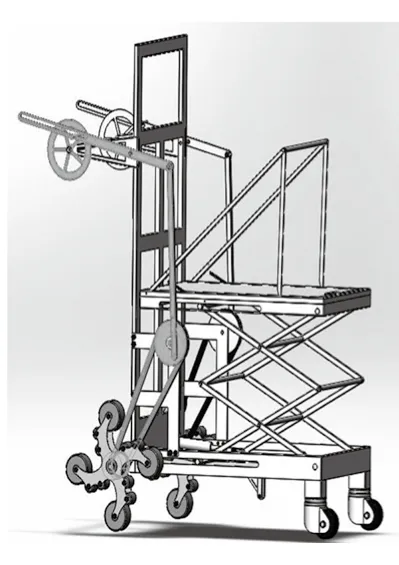
图1 爬楼传动机构图

图2 平面四杆机构运动示意图
2 货物升降机构设计
2.1 基本结构组成
货物升降机构主要由支撑平台、液压推杆、杆(剪臂)、升降轴、滑行杆、卡位齿、脚拉杆、弹簧、摇杆等组成,如图3所示。
2.2 货物升降原理及工作过程
该剪叉式升降装置工作过程中,平台初始位置位于最低点,平台上水平面与车架上水平面平齐,同时滑行杆被卡位齿条卡位在齿槽中,不能自由滑行。当小车需要递接货物的时候,通过用脚来向后拉动脚拉环,同时摇杆下摆,卡位齿条齿槽下降,滑行杆受液压力滑行,平台上升。当平台上升到所需高度时,便可抬脚移除脚拉力,同时摇杆受到弹簧弹力,自动上摆回位,滑行杆再次被卡在卡位齿条的齿槽中,不能自由移动,平台不再上升。
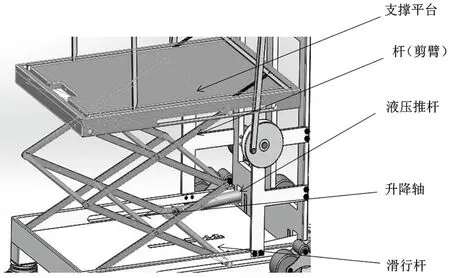
图3 货物升降机构基本结构组成
在未装载货物之前,承载平台已升到指定平齐高度,然后可以将所需运载货物转移到平台。将货物转移到平台后,接着便可再次用脚拉动脚拉杆,解除滑行杆移动限制,载货平台可以自由下降,但由于有液压杆的推力作用,滑行杆只能缓慢的滑行,从而达到了了缓降承载平台的目的,保证了所运载货物的安全转移。
3 棘齿三角架设计
棘齿三角架的基本结构组成:卡槽侧杆、卡槽竖杆、齿条、预紧弹簧和固定杆,如图4所示。
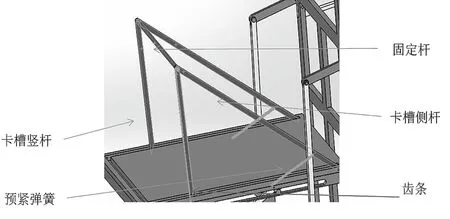
图4 棘齿三角架三维示意图
棘齿三角架的作用:通过调节卡槽竖杆与齿条的结合位置,可以对装载在小车上的不同大小的货物进行卡位稳固,防止货物摇晃受损。
4 轮组爬楼机构设计
4.1 结构设计
轮组爬楼原理及工作过程如图5所示。本轮组爬楼机构主要由大轮、第一小轮、第二小轮、轮架、带轮四部分组成。该爬楼行星轮类似于四叶草结构,每片叶子上装有一大两小共3个轮子,整个行星轮共有12个轮子。该行星轮爬楼时,动力来自于带轮,即,人通过作用力间接摇动带轮运动,从而带轮转动又带动四轮轮组转动,实现爬楼功能。由于楼梯阶梯高低不同,该爬楼行星轮组针对不同高度的阶梯设计了多组小轮,这些小轮可以根据不同的情况起到减小行星轮组在爬楼时的大幅震动作用,辅助爬楼小车载货稳定运行。
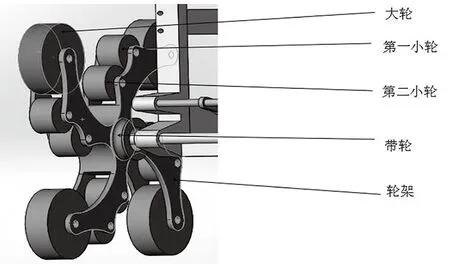
图5 行星轮组三维示意图
4.2 设计计算
本行星轮组在设计过程中针对台阶高度加入减震小轮,设计计算如下。
(1)临界点一
行星轮组在爬楼梯翻转过程中,两小轮同时与台阶接触,模型简图如图6所示。
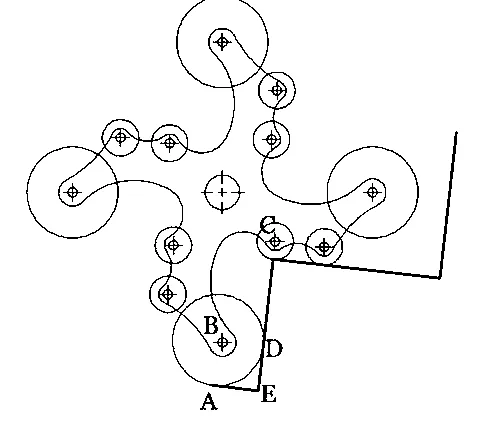
图6 行星轮组爬楼示意简图
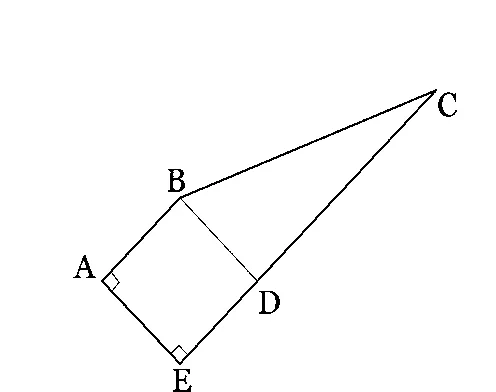
图7 行星轮组爬楼几何示意图
由行星轮组机构模型简图6可得,AB=BD=DE=AE=R=25.00mm(其中R为大轮半径),r=10mm(小轮半径),BC=62.62mm(两轴心距离),此时楼梯实际高度为H。
根据行星轮组机构几何关系图7可得:在△BCD中,

(2)临界点二
行星轮组在爬楼梯翻转过程中,第二小轮与台阶直角接触,并且此时第一轮恰好能与台阶面相切,模型简图如图8所示。CE=DC+DE。
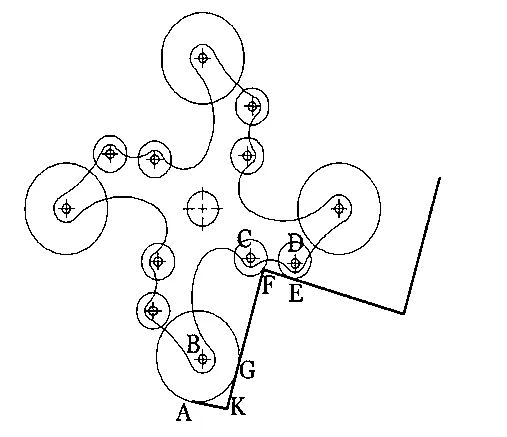
图8 行星轮组爬楼示意简图

图9 行星轮组爬楼几何示意图
由行星轮组机构模型简图8可得,AB=BG=GK=AK=R=25.00mm(其中R为大轮半径),r=10mm(小轮半径),BC=62.62mm(两轴心距离),CF=r,∠β=125.12°(三轴心行成的夹角大小),CD=27.18mm(两小轮轴心距离),DE=r,此时楼梯实际高度为H。
根据行星轮组机构几何关系(如图9所示)可得:

进一步求解得:
GF=60.65mm;BF=65.60mm;FD=18.30mm;
β1=103.03°;β2=22.09°;α1=22.40°;
α2=68.43°;α3=146.06°;α4=33.11°
则楼梯高度:H=KG+GF=60.65+25=85.65mm
(3)临界点三
行星轮组在爬楼梯翻转过程中,第二小轮恰好于台阶直角接触并相切,模型简图如图10所示。
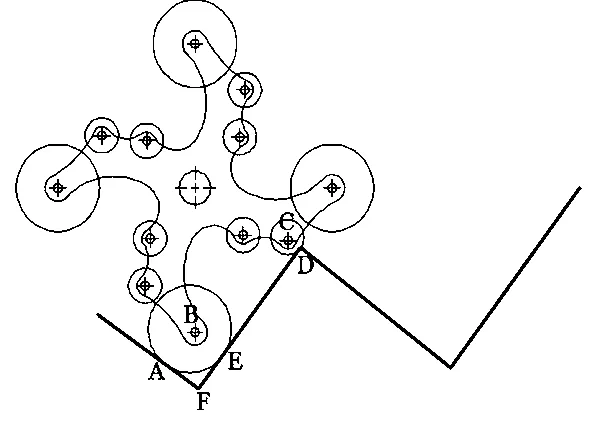
图10 行星轮组爬楼示意简图

图11 行星轮组爬楼几何示意图
由图10可得,AB=BE=EF=AF=R=25.00mm(其中R为大轮半径),r=10mm(小轮半径),CD=r,BC=76.76mm(大轮轴心与第一小轮轴心之间的距离),此时楼梯实际高度为H。
根据行星轮组机构几何关系(如图11所示)可得:
四边形DEGC为矩形;GE=CD=r=10mm;CG=DE;BG=BEGE=25-10=15mm;在△ BGC中,DE=CG=75.28mm。则此时楼梯高度H=DF=DE+EF=75.28+25=100.28mm。
综合上述三种临界点所得阶梯高度可得,本行星轮组可适用于楼梯阶梯高度范围为0~100.28mm。当楼梯范围在72.41~85.65mm时,第一小轮和第二小轮都起到减震作用;当楼梯范围在85.65~100.28mm或者0~72.41mm时,第一小轮起到减震作用。实际小车的尺寸为模型小车尺寸的两倍,则实际行星轮组可适用于楼梯阶梯高度范围为0~200.56mm。当楼梯范围在144.82~171.30mm时,第一小轮和第二小轮都起到减震作用;当楼梯范围在171.30~200.56mm或者0~144.82mm时,第一小轮起到减震作用。
5 结语
通过对现有爬楼车结构的改进以及用途的增加,提出了一种多功能商品载运爬楼车的设计方案。增加了减震小轮,提高了爬楼车的爬升缓冲力。同时增加了棘齿三脚架,保证了商品运输过程的稳定性。通过理论分析论证了设计的可行性,实际测试表明多功能商品载运爬楼车的运输爬楼效果较好。
猜你喜欢
制造技术与机床(2019年8期)2019-09-03
中国自行车(2018年10期)2018-11-30
中国自行车(2018年9期)2018-10-13
中国自行车(2018年7期)2018-08-14
中国自行车(2018年7期)2018-08-14
大众摄影(2018年7期)2018-07-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
中南大学学报(自然科学版)(2017年3期)2017-05-19
中国自行车(2017年1期)2017-04-16