
应用地面三维激光扫描对白桦单木结构参数的提取1)
2018-08-13 05:04:10郑淯文吴金卓林文树李祥
东北林业大学学报 2018年8期
郑淯文 吴金卓 林文树 李祥
(东北林业大学工程技术学院,哈尔滨,150040)
单木结构参数(树高、胸径、冠幅、树冠体积等)是进行森林资源调查与估测的重要测量因子[1]。在进行林分单木结构参数提取时,传统的测量手段存在费时、费力与破坏性强等缺点,而近年来在国际上发展迅速的三维激光扫描技术的引入,使得这一难题得到解决[2]。地面三维激光扫描,采用一种非破坏性的手段获取树木的三维点云信息,通过对获取的点云信息进行预处理后提取树木结构参数;这种方法,不仅克服了传统测量方法的缺点,还提高了树木结构参数精度[3]。
关于利用地面三维激光扫描技术对单木结构参数提取的研究,多数针对林地结构较为简单的人工林[4-12],对复杂样地,如天然次生林样地进行研究的较少。我国东北地区的次生林比例较大,其面积约为全国森林总面积的一半[13-15];但针对这些次生林的树木结构参数提取研究较少。因此,本文结合地面三维激光扫描数据,利用Hough变换算法对大小兴安岭天然次生林白桦(Betulaplatyphylla)样地进行树木结构参数提取,进而可以通过点云数据提取的结构参数实现活立木木材性质预测、研究如何对其进行合理改造,旨在为提升我国东北地区次生林立木质量提供参考。
1 研究方法
1.1 数据获取
研究区域位于黑龙江省带岭林业实验局东方红林场(东经128°37′46″~129°17′50″,北纬46°50′8″~47°21′32″)、大兴安岭地区的翠峰林场(124°23′47.8″~124°24′35.0″,北纬50°34′9″~50°34′32″),研究对象均为天然次生林白桦树种。两个实验地区,冬季长且干燥、寒冷多雪,所以林木生长速度慢。林区地形复杂,地势高,地形起伏大,杂草、灌木较多且郁闭度较高。对样地内扫描目标白桦树逐一进行编号并标记,利用全站仪测量单木位置与树高,胸径尺测量单木胸径,皮尺测量东西和南北树冠。经过数据统计分析得到胸径、树高、冠幅的最大值,分别为28 cm、24.78 m、7 m,最小值分别为5.3 cm、6.9 m、2.1 m,平均值分别为13.71 cm、14.94 m、3.9 m。
本研究采用FARO Focus3D X130地面三维激光扫描仪。测距范围为0.6~330.0 m;视野范围为300°(垂直)×360°(水平);测距误差为±2 mm;分辨率(像素)最高7千万;步长范围为0.009°(垂直)×0.009°(水平);数据存储为SD、SDHCTM、SDXCTM,包括32GB的存储卡;扫描仪控制,通过触摸屏或远程控制;GPS为集成式GPS接收器。该设备实现了精密扫描技术与便携式和易用性融合在一起,从而具有可靠性、灵活性,并能够实时查看扫描的数据。
样地点云数据的获取,主要包括样地范围的确定、测站的布设、标靶球的布设、测站扫描。具体扫描过程:
(1)样地范围确定。扫描前,根据白桦树木的位置分布确定具体样地的位置和大小,本研究共扫描4块样地(见表1),X1、X2位于小兴安岭,D1、D2位于大兴安岭。

表1 样地基本情况
(2)测站布设。在进行站点的布设时,尽量均匀并且测站通视良好,测站四周没有遮挡物;另外,次生林样地地形复杂,林下灌木较多,所以此次扫描每块样地均设置6站进行扫描,样地中心1站,样地边缘5站。
(3)标靶球放置。标靶球布设均匀,不能过于稀疏或密集;确定在中心位置架设扫描站可明显看到全部的标靶球;相邻测站间能看到至少3个相同的标靶球;尽量不让标靶球在同一直线上,有一定的高度差。根据样地实际情况和扫描便利,截取6个长度约在1.5 m的PVC管插入地面,将标靶球放于PVC管上,解决标靶球放置难的问题。
(4)扫描参数设置。在分站扫描时,设置不同参数,使得扫描得到的点云数据既能满足精度要求,又能减少扫描时间。如,扫描区域设置水平角度为0°~360°,垂直角度为-60°~90°,扫描分辨率设置为1/5,扫描质量设置为3 X。
1.2 数据处理
样地扫描后,对扫描后的点云数据进行一系列处理,以便后续对单木参数进行提取。数据的处理步骤,主要包括利用Trimble Realworks软件进行测站拼接,然后利用Geomagics Studio软件进行去噪与抽稀。测站拼接,是将同一样地内分站扫描的数据,利用相邻测站的相同的3个及以上的标靶球强制符合,统一到同一坐标系下。为了提高精度,在拼接的过程中不断对拼接的误差进行优化;如果系统自动确定的标靶球位置误差较大,可手动进行位置确定。在扫描过程中,由于环境因素,如空气中的灰尘、枝叶受到风力的影响产生位移、树干本身的形状及纹理因素和仪器自身产生的偏差等各种因素的影响,使得仪器接收的激光回波脉冲形状与发射的不一致,由此产生部分“噪点”;所以,进行数据拼接后,需要去除非树木点及噪点。由于处理后的数据量较大,还需要对扫描后的点云进行简化,在不影响后续处理精度的情况下去除部分点云,即“抽稀”。本文对扫描的4块样地处理后的数据,均抽稀掉二分之一的点云(见图1)。

(a)带有噪点(红色)的原始点云 (b)处理后的点云
1.3 点云数据单木参数提取流程
利用经典Hough变换算法提取激光点云数据的单木位置与胸径,并分层计算点云个数,提取树高;通过遍历算法得到树冠冠幅,并运用回归分析对算法估计值和实测值进行拟合,判断算法的精确性;利用体元模拟算法和传统树冠体积计算方法,分别估测树冠体积。具体的提取流程如图2所示。
1.4 Hough变换提取单木位置与胸径
点云数据单木位置提取是参数提取的前提,在确认树木具体位置后才能进行点云数据的胸径和树高提取。本文采用二维Hough变换的方法识别单木,获取单木位置和胸径。具体算法:
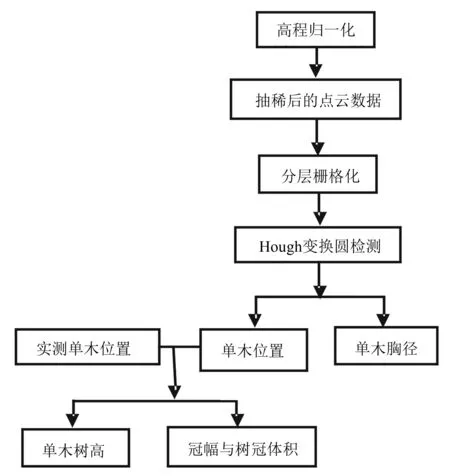
图2 点云数据单木参数提取流程
(1)高度归一化。由于树木高程不同,提取位置与胸径之前,需要把单木的高程归一到同一高度,以便对同一高度的点云数据进行切片。首先,将样地扫描点云分成0.05 m×0.05 m的网格,遍历出每个格网垂直方向z值的最小值;然后,将所有点云的z值减去对应格网的最小值,将所有的单木归一化到高程为0的平面上。
(2)树干处点云的分层截取与栅格化。由于调查的4块样地属于天然次生林样地,林下灌木较多,处理数据时易受到影响,所以对树干点云从1.3 m处往上进行水平分层,层间距3 cm,厚度10 cm,共11层,高度在1.3~2.7 m之间。将截取的点云按照0.05 m×0.05 m的分辨率进行分层栅格化,随后根据每个体元内的点云数量确定像素值;若点云数量超过3个,则将像素值赋值为255;若小于3个,则赋值为0。
(3)Hough变换检测圆。将处理后的栅格图像作为输入文件,进行Hough变换检测单木位置与胸径。由于本次扫描单木胸径最小为5 cm,所以检测半径从2 cm开始,步长1 cm,直到20 cm结束(本次样地中单木胸径最大为31 cm)。对所有的圆心进行分类,根据样地内树木胸径处的实际最小距离40 cm,将距离小于40 cm的归至同一单木。在计算出同一株的圆心后,将检测到的点云层数小于5的判断为非单木,剔除掉。识别出单木后,每一层点云数据可能仍存在多个圆心与半径,需要进一步计算出一个确定的值,具体做法:计算同一株树的所有圆心坐标的离散程度,将圆心坐标距离的阈值小于5 cm的圆心与其对应的半径去除,根据剩余的圆心与半径,取距离各自圆心0.98~1.02倍半径范围内的点云,然后开始分层计算,对每层的圆心O(x,y)取平均值,计算所有范围内的点云到圆心距离的平均值,将其设为这层圆的半径。
获取到每层的圆心与半径后,可取1.3~1.4 m处检测的圆直径即为胸径。原始胸径处点云与Hough变换后的胸径点云如图3所示。

(a)胸径处的原始点云 (b)Hough变换后胸径处点云
1.5 单木树高提取
根据Hough变换检测得到多层树干处的圆心,可以拟合出一条直线,提取距离直线一定范围内的点云,得到单木点云数据,并在此基础上进行树高提取(见图4),即:对点云数据进行垂直方向上的分层,厚度为0.1 m,遍历每层的点云数量,自下而上进行计算,若第k层开始,连续3层的点云数量均小于10,则树高H=0.1k。
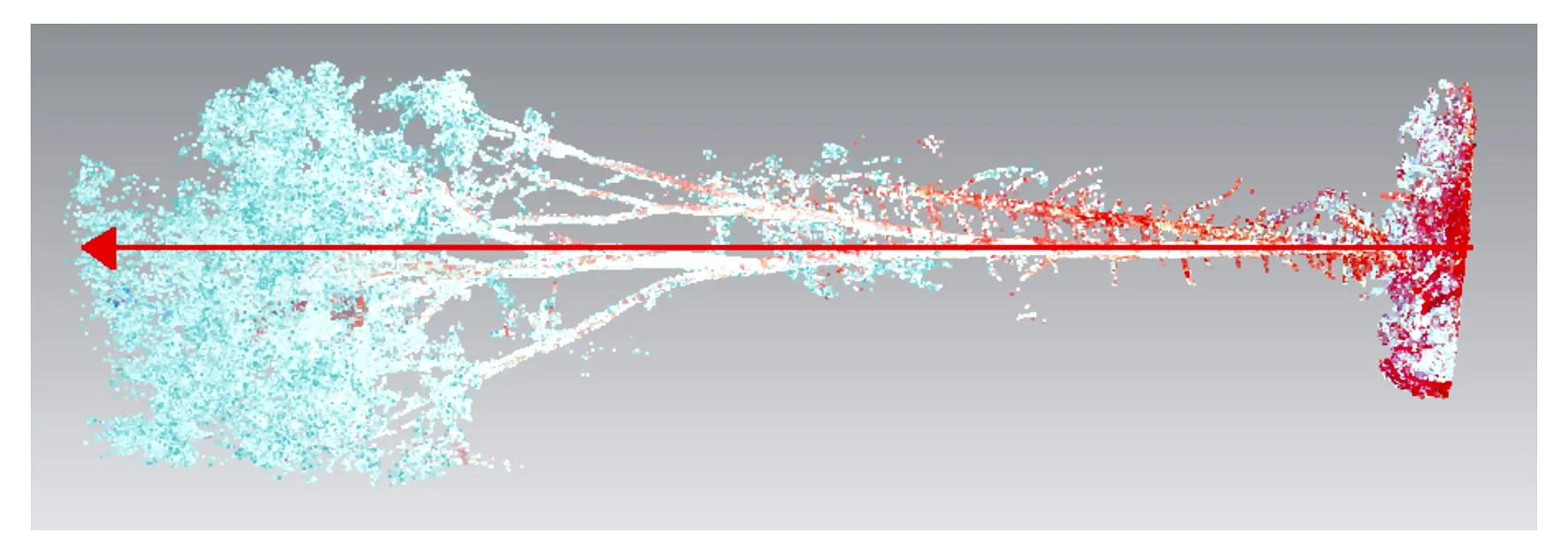
图4 沿树干生长方向提取树高示意图
1.6 单木冠幅与树冠体积的估测
利用提取树高点云方法,进一步扩大点云的提取范围,得到整株或包括相邻单木部分点云的数据,利用Geomagic Studio软件手动提取单木树冠,进行冠幅与树冠体积的计算。通过遍历算法计算单木点云最大和最小的X、Y(X、Y分别为点云的x、y坐标)值,利用树冠直径计算公式(D=(Ymax-Ymin+Xmax-Xmin)/2)计算单木树冠直径,利用体元模拟和传统树冠体积算法提取树冠体积。
体元模拟法提取树冠体积:将三维空间内的树木点云数据,分别沿x、y、z方向进行分割,步长均取0.1 m,分割成0.1 m×0.1 m×0.1 m的正方体体元。遍历所有的体元内的点云个数(n),若n大于3,则k=k+1(k为点云数量大于3的体元个数),估测单木树冠体积为V=k×0.001。
传统体积计算方法计算树冠体积:传统树冠体积的计算方法,是以树冠的冠幅与冠高为参数,将树冠模拟为规则几何体进行计算体积。即,通过人工测量样木冠高与冠径,再根据样木冠形选择近似的规则几何体体积计算公式计算树冠体积。不同的树种,其几何体形状及树冠体积计算公式不同[16],由于白桦树种树冠大、体形状为卵形,因此,白桦树冠体积计算公式:V=πx2y/6,x为冠径,y为冠高。
2 结果与分析
2.1 单木识别
进行单木识别中,主要计算过检和漏检两种错误。其中,过检是在单木识别时,将非单木识别成单木;漏检是没有将单木识别出来。本研究在4块样地中,共有160株单木,识别正确率分别为91%、90%、87%、78%(见表2),总体平均识别率达到86.5%。其中,每块样地均存在漏检单木,共22株;对于过检单木,仅D1样地过检1株。对于漏检单木,胸径值大多较小,主要集中在5~15 cm之间;胸径在5~10 cm的单木,漏检12株,正确率为58%;胸径在10~15 cm的单木,漏检6株,正确率为88%;胸径在15~20 cm的单木,漏检3株,正确率为95%。由识别率可见:Hough变换,对于胸径较大的单木识别率高;对胸径在5~10 cm等相对较小的单木识别率,可通过改进Hough变化算法进行提高。

表2 4块样地的单木识别
2.2 单木胸径估测
通过Hough变换算法计算胸高处(1.3 m)的圆直径,估测单木胸径。对4块样地的单木胸径估测结果,均方根误差分别为2.19、2.64、1.70、1.59 cm,平均均方根误差为2.03 cm。由图5可见:4块样地单木胸径的估测结果,平均决定系数(R2)为0.82,估测结果较好。其中, X1、X2、D1样地的决定系数均大于0.8,而D2样地的单木估测结果最差,X1样地估测结果最好。对于胸径较小单木的估测,多数胸径估测值比实际测量值高;对于部分胸径较大的单木,也存在个别低估现象。
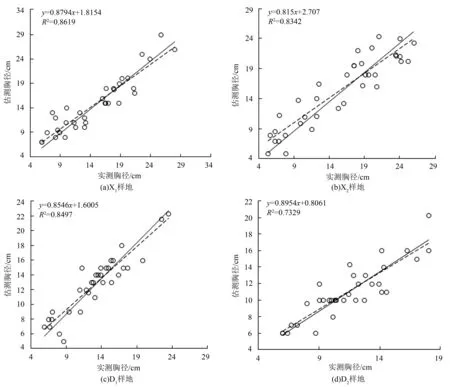
图5 4块样地单木胸径估测结果
2.3 单木树高估测
在利用Hough变换检测单木位置的基础上提取树高,对4块样地的单木树高估测结果,均方根误差分别为2.59、2.01、1.36、1.94 m,平均值为1.98 m。由图6可见:4块样地树高的估测结果,平均决定系数为0.79,估测结果较好。但相对于胸径的估测结果,树高估测稍低。对4块样地的树高估测,X1、X2、D1样地的决定系数均大于0.8,D2样地的决定系数为0.71,估测结果最差。部分单木,由于被附近优势木遮挡,存在高估现象;另外,对于距离测站相对较远的单木,树高也存在一定的低估现象。

图6 4块样地单木树高估测结果
2.4 单木冠幅与树冠体积估测
对4块样地的单木冠幅直径估测结果,均方根误差分别为0.46、0.62、0.37、0.34 m,平均值为0.45 m。由图7可见:4块样地冠幅的估测,平均决定系数为0.83,估测结果较好。从X1、X2、D1样地的估测结果图可看出,数据较为离散,而且部分的估测数据大于实际数据。4块样地也均存在部分低估现象,尤其是D2样地,低估现象最为明显。
运用体元模拟法与传统树冠体积计算方法进行计算(见图8)。运用体元模拟法计算,4块样地的平均树冠体积分别为87.8、104.3、73.2、76.4 m3,平均值为85.4 m3;运用传统树冠体积计算方法计算,4块样地的平均树冠体积分别为57.7、67.6、41.4、47.4 m3,平均值为53.5 m3;两种方法对4块样地的估测,体积平均差异分别为33.8%、36.2%、35.1%、37.2%,总体平均相差为35.6%。由图8可见:利用传统体积计算方法得出的树冠体积,比体元模拟法大;当树冠体积越大,两者之间的差别也越大。
为了进一步比较两种树冠估测方法,对其进行回归分析(见表3)。由表3可见:两种方法的树冠体积估测结果较为接近,4块样地的平均决定系数为0.96。

表3 4块样地两种方法估测树冠体积拟合统计
注:V1为体元法估测的单木树冠体积,V2为运用传统规则几何计算方法计算的单木树冠体积。
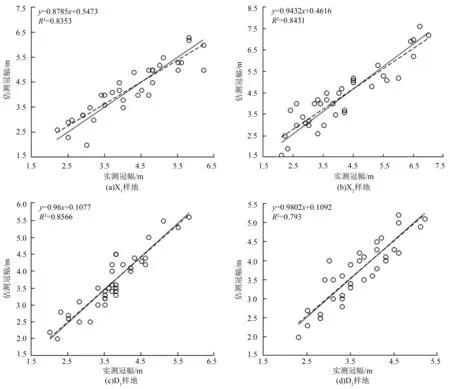
图7 4块样地单木冠幅估测结果

图8 两种方法计算的4块样地树冠体积对比
3 结论与讨论
利用Hough变换算法,可以有效地识别样地中单木具体位置,识别率可达86.5%。通过在树干处进行分层提取圆心,可以排除大部分非树干处识别的圆;在对4块样地的单木识别中,过检较少,而漏检较多;通过进一步分析发现,编制的算法对胸径较大的单木识别率较高,而对胸径在5~10 cm之间的较小单木识别率相对较低。
4块样地单木胸径的估测结果,平均决定系数为0.82,估测结果较好。从点云图像与数据分析可看出,林下灌木较多和距离测站较远的单木数据不完整,会造成胸径处的拟合产生误差;另外,对树干形状不规则树木,胸径检测误差也较大。
根据单木生长方向估测的树高效果较好,4块样地的平均决定系数为0.79。根据单木位置提取点云数据时,会将附近其他单木的部分树冠点云截取进去,这在对矮小单木树高估测时,周围优势木的树冠被计算进去,导致下层木被高估的现象;另外,由于地势及林下灌木等原因,在扫描时会产生部分树干处的点云缺失,存在单木树高被明显低估的现象。
利用点云处理软件人工截取树冠,并利用算法对冠幅进行测量,估测的结果较好,4块样地冠幅的估测,平均决定系数为0.83。在对树冠估测时,产生误差的主要原因,是灌木生长茂盛,郁闭度高,相邻单木的树冠紧密相连。
对利用传统规则几何体积计算法与点云体元模拟法估测的树冠体积进行回归分析,发现二者的拟合精度较高。韦雪花等[12]通过利用点云数据及传统计算方法估测树冠体积,两者差异为44.75%;而本文对白桦树木进行树冠体积估测,两者间差异为35.6%。传统算法,由于是人工目视测量冠幅与冠高,同时利用近似的几何模拟公式进行计算,没有考虑树冠实际形状,所以得到的结果精度较低;体元模拟法,只需对扫描点云数据进行统计计算,无需考虑其形状,所以精度相对较高。另外,在进行体元计算时,需要判断体元的有效性,即点云数小于3的为无效体元,将树冠内部的空隙处去除,所以,体元估测法比传统计算法估测的树冠体积相对较小。
猜你喜欢
东北林业大学学报(2023年6期)2023-05-31 02:56:16
农业工程学报(2022年14期)2022-10-19 02:24:48
丽水学院学报(2022年2期)2022-04-19 01:22:10
地理空间信息(2021年10期)2021-11-14 10:01:12
林业科技情报(2021年3期)2021-09-01 02:01:26
遥感信息(2019年1期)2019-03-22 01:38:16
森林工程(2018年5期)2018-05-14 13:54:30
测绘工程(2018年3期)2018-03-20 03:05:12
中南林业调查规划(2017年1期)2017-12-19 00:58:07
测绘学报(2015年4期)2015-01-14 03:01:28
