
第19届亚洲物理奥林匹克竞赛实验试题简介
2018-08-09 01:15张春玲惠王伟张天浩
物理实验 2018年7期
张春玲,惠王伟,宋 峰,张天浩
(南开大学 物理科学学院,天津 300071)
第19届亚洲物理奥林匹克竞赛于2018年5月5日至13日在越南河内举行,共有来自25个国家和地区的185名选手参加. 竞赛设金牌33枚,中国队8名参赛选手均获得金牌,并获得个人总分第一、理论第一、理论解题最佳创意奖和最佳男生奖.
本届竞赛的实验试题是巨磁阻,来源于2007年Albert Fert和Peter Grünberg 所获得诺贝尔物理学奖的巨磁阻效应. 因原题较长,在此进行了缩略,但尽量保留原貌. 试题解答为赛会提供的标准答案. 最后对试题和中国队选手的答题情况作了简短评论.
1 试题简介
磁阻效应是指样品的电阻依赖于外部的磁感应强度. 如果在外部磁场B=0时样品的阻值为R(0),在磁场B下样品的阻值为R(B),电阻的相对变化率为
(1)
通常在相对较弱的磁场中电阻的相对变化率较小;在磁感应强度变化范围相对较大时,由于洛伦兹力的作用,电荷载流子的流动性显著降低,样品电阻将会增大.
对于图1所示的厚度为几nm的铁磁层和非铁磁层交替结构,固体中传导电子(载流子)的自旋与磁矩的相互作用,将导致巨磁阻效应(Giant magnetoresistance,GMR). 图中1表示磁化方向,2表示电子路径,3电子表示自旋方向. 无外部磁场时,相邻2个铁磁层具有相反方向的自发磁化. 当结构中传导电子的自旋平行于磁化方向时,与磁矩有关的传导电子的散射弱;自旋反平行于磁化方向时,与磁矩有关的散射强,所以多层结构的总电阻率高[图1(a)]. 当施加足够强并平行于结构中各层界面的磁场时,所有铁磁层都沿磁场方向被磁化. 自旋方向平行于磁化方向的电子通过该结构几乎没有与磁矩有关的散射;自旋反平行于磁化方向的电子在铁磁层中会强烈散射. 由于2个自旋通道并行传导电流,因此多层结构的总电阻主要由高导电的电子决定,会很小[图1(b)]. GMR 效应的等效电路如图1所示. 图中R表示具有强散射的大电阻,r表示具有弱散射的小电阻,R0是这种结构在零磁场中的电阻,RB是磁场足够强使相邻2个铁磁层在相同方向磁化时的电阻.

(a) (b) 图1 巨磁阻效应模型
GMR的应用之一是磁传感器,用来测量所施加磁场的磁感应强度. 广泛使用的GMR传感器由连接在惠斯通电桥中的4个GMR元件a,b,c和d组成,如图2(a)所示,每个元件由上述模型中的多层结构组成,其中2个元件被封装以屏蔽所施加的外磁场,从而对外部磁场不敏感. 整个磁传感器装在如图2(b)所示的8引脚器件中,电源电压连接到引脚4和8. 引脚1和5间的电压为输出信号电压. 也可以对其他引脚供电而不会损害传感器. 传感器的灵敏度轴由图2(b)中箭头表示,传感器对垂直于该轴的磁场不敏感.

(a) (b)图2 磁传感器
为制造具有不同灵敏度的传感器,可以使用磁通量集中器,以使传感器内部元件的有效磁场比施加的磁场强. 由于磁通量集中器和多层结构的磁性层中存在铁磁材料,所以传感器的电特性存在磁滞现象. 实验目的是研究巨磁阻效应、巨磁阻效应磁传感器以及巨磁阻效应传感器的一些应用.
2 实验仪器和元件
题目中需要的仪器和元件如图3所示.

1.导线 2.变阻箱 3.220 V交流电源插线板 4.电池 5.扁平线圈 6.可调节直流电流源 7.带高杆的支撑架 8.圆形线圈 9.埋有电路的印刷电路板 10.横轨 11.转台 12.具有纵向导轨的平台 13.磁传感器 14.传感器固定架 15.短杆支撑的刻有角度的圆台 16.传感器接线盒 17.接线盒 18.铁磁片19.永久磁铁片 20.万用表(3 个) 21.双灯丝电灯泡图3 仪器和元件的图片
3 实验任务和答案
3.1 实验A:了解磁场
3.1.1 A.1 了解由载流圆形线圈产生的磁场
圆形线圈的平均直径d=10.0 cm,匝数N=500. 当电流I流入时,线圈在其中心产生的磁场,约等于半径为圆形线圈的平均半径、电流为500I的圆形电流环产生的磁场. 圆形线圈中心处的磁感应强度可以写成B=kI的形式. 要求计算出k的数值. 答案为k=6.28×10-3mT/mA.
3.1.2 了解地球磁场
可认为地球磁场是无处不在的均匀场,其水平分量的大小用Bh表示. 要求写出与Bh成β角的方向上的磁场Bβ的表达式,用Bh和β表示(注意:始终考虑地球磁场对磁场测量的影响). 答案为Bβ=Bhcosβ.
3.2 实验B:使用GMR磁传感器研究GMR效应
本部分研究磁传感器内每个元件的电阻对外部磁场的依赖性. 圆形线圈放置在纵向导轨上,传感器固定架用旋钮拧在圆形刻度盘的水平位置,将磁传感器置于圆形线圈的中心,并且传感器的灵敏轴垂直于线圈平面. 通过改变圆形线圈中的电流来改变作用在传感器上的磁场. 确保磁传感器的灵敏度方向沿着东西方向(实验桌上标记),以保证地球磁场不会影响测量. 磁传感器由电池供电. 圆形线圈由可调直流电流源供电.
3.2.1 B.1 确定 GMR 元件的电阻
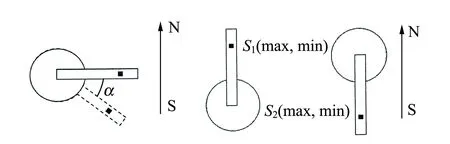
要求先将圆形线圈中的电流设为I=0,测出元件在B=0时的电阻;将电流I设置为可能的最高值,测出元件在最大外部磁场下的电阻. 绘制实验图,给出由实验数据计算每个元件电阻的表达式;测量B=0和B=Bmax时4个元件的电阻值,指出哪几个元件对磁场敏感.
答案给出的实验图如图4所示.
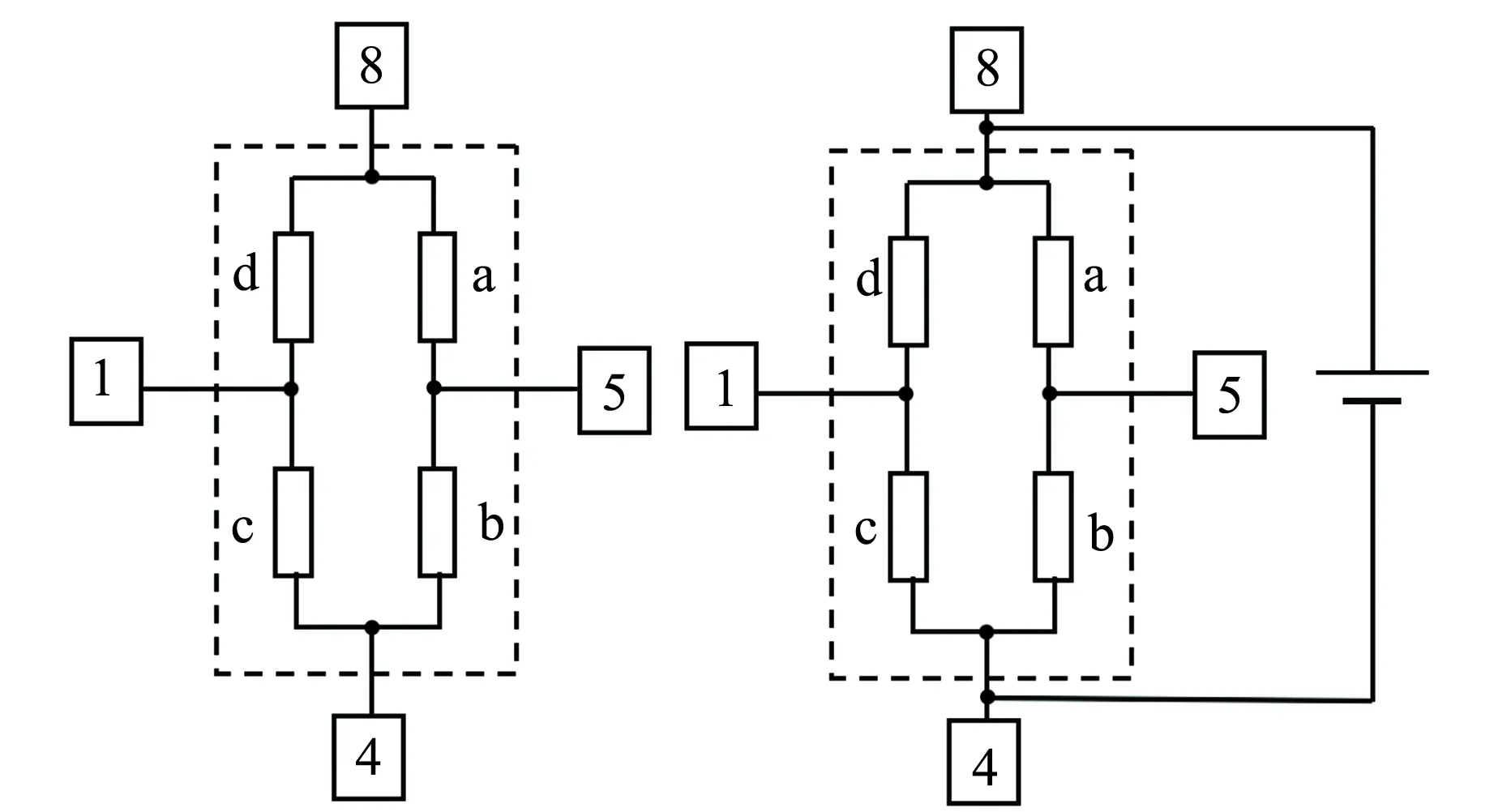
(a) (b)图4 测元件电阻实验图
先按照图4(a)所示短接4和8,令R5,84=m,R1,84=n,则
(2)
(3)

(4)

(5)
联立式(2)~(5),得到
根据测量结果计算得到无外加磁场和外加磁场最大时4个元件的阻值. 因为a和c加磁场前后阻值发生变化,另外2个不变,可判断出元件a和c对磁场敏感.
3.2.2 B.2 GMR元件的特性

答案中实验电路可以选用B.1部分的电路,通过调节线圈中的电流I进行测量,也可以选用其他方法. 得到的δ(B)-B图线如图5所示. 曲线的平均斜率α=-0.067 mT-1,GMR系数δ=13.5%,R=6 740 Ω,r=3 180 Ω,γ=0.47.

图5 δ(B)与B的关系图
3.3 实验C:巨磁阻效应磁传感器的研究
本部分研究磁传感器的性质. 圆形线圈放置在纵向导轨上,用螺丝将传感器固定架固定在圆形刻度盘的水平位置,令传感器的位置处于圆形线圈的中心,而传感器的中轴与线圈平面垂直. 通过改变线圈电流来改变作用在传感器上的磁场. 确保传感器的灵敏轴方向设置于东西方向,避免地球磁场对测量的影响.
3.3.1 C.1 传感器的输出特性
按照题目要求进行数据测量后,得到如图6所示的曲线. 曲线的饱和区域和线性区域用“S”和“L”圈出. 与本图对应的m=2.0×102mV/mT,矫顽磁场Bc=0.10 mT.
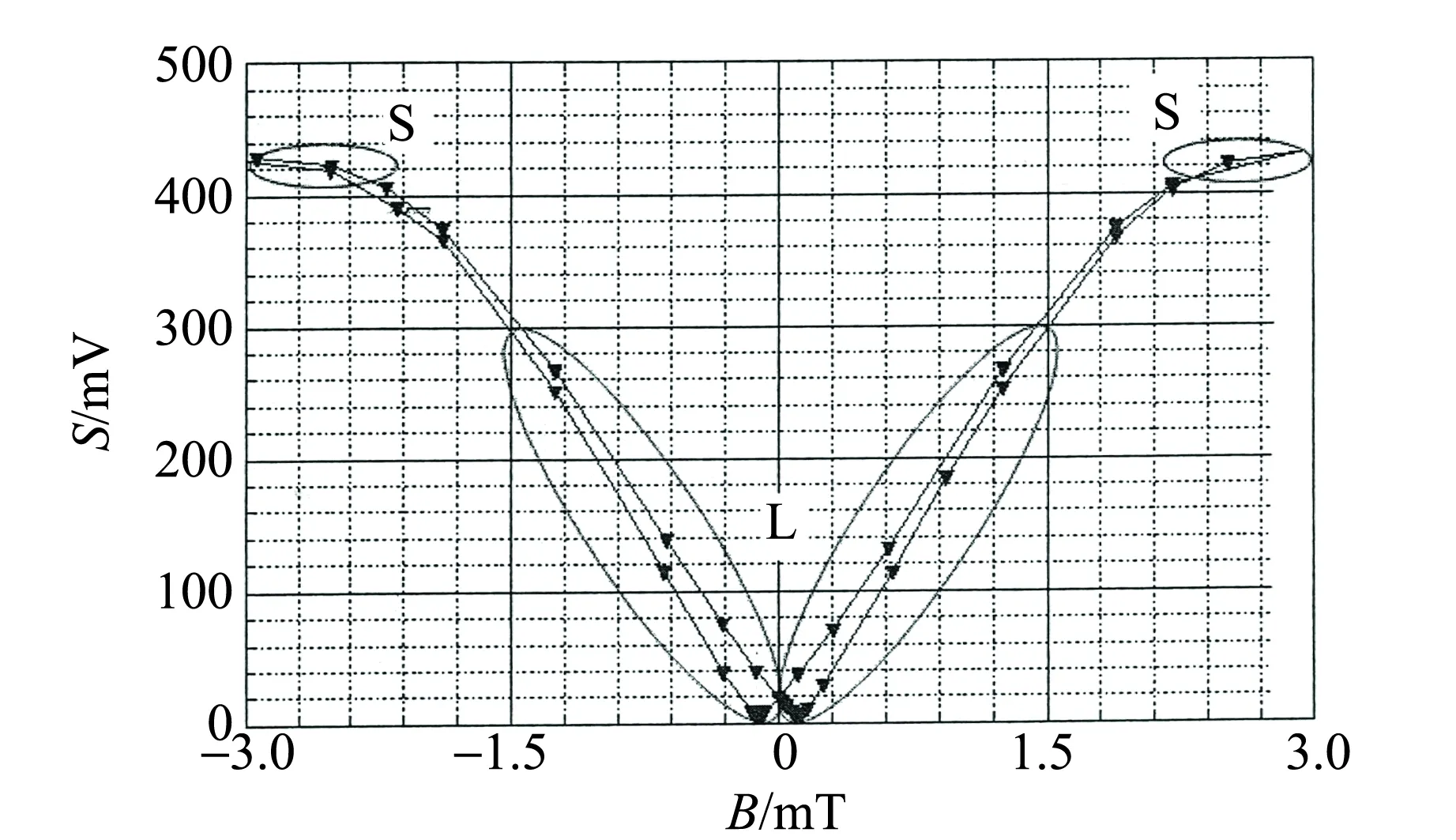
图6 S对应于B的图线
本部分题目后面给出提示:若想用曲线S(B)的线性区域,可把永久磁铁片放在传感器固定架上传感器的附近,改变它与传感器的相对位置以选择曲线上的工作点,找到合适的工作点后,用胶布将磁铁片固定. 以上步骤叫做偏置.
3.3.2 C.2 供电电压对输出电压的影响
本部分要用电池盒给磁传感器供电. 将传感器连接到电池盒不同的插孔,可以选择不同的供电电压E. 设置线圈的电流I,使其对应于S(B) 曲线的线性区域. 要求:测量E及对应的输出电压S;画出S作为E的函数图;推导S关于B.2中求出的GMR元件的斜率α、供电电压E以及外加磁场B的关系式. 这里假设两元件的α相等且没有磁滞特性,在没有磁场的情况下4个元件的电阻值均相同.

图7 S-E的函数图线
3.3.3 C.3 磁通量集中器的研究
磁传感器中的磁通量集中器包含2块厚度为μm量级、长度为数百μm的薄膜铁磁结构,其作用是加强2块铁磁结构空隙的磁场. 为研究其对磁传感器中有效磁场的影响,用2块长度为L2的铁磁性薄片组成外置的磁通量集中器(如图8),放置在磁传感器两端附近,两薄片之间相距L1.
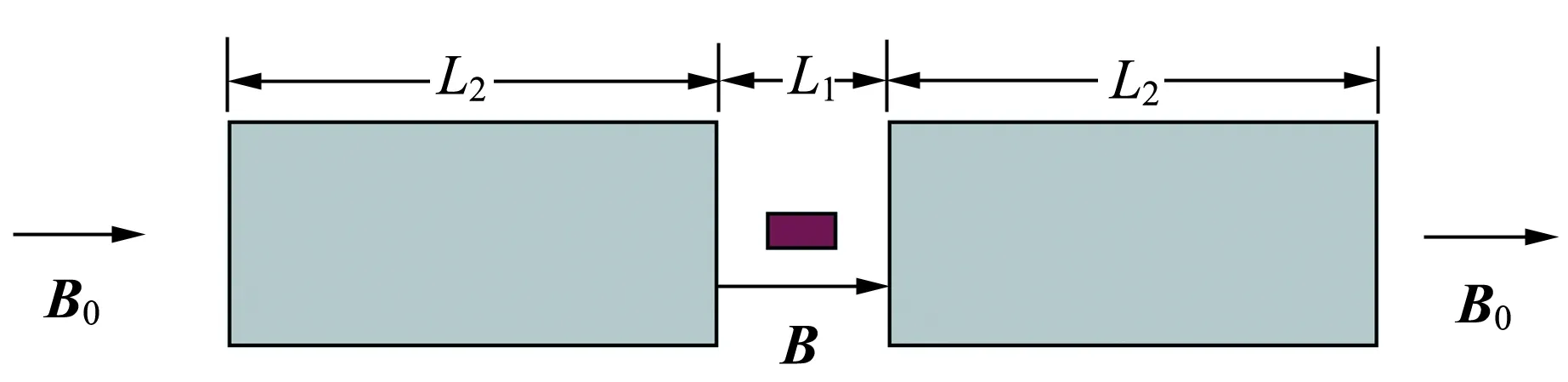
图8 磁通量集中器示意图
如果将传感器和磁通量集中器放在强度为B0的均匀磁场中后,作用在传感器上的有效磁场为B. 假如L1的改变范围不太大,B可以用以下经验公式表示:
(6)
本部分希望用磁场传感器及2片铁磁性薄片 进行实验,以求出式(6)中n值. 为此,首先要选择需要用哪个磁场进行实验(a.圆形线圈电流所形成的磁场;b.扁平线圈电流所形成的磁场;c.永久磁铁片的磁场;d.地球磁场);画出实验简图,并求出依据实验数据决定n值的表达式;对于不同的L1值,进行实验找出B/B0;画出B/B0关于某个合适变量的函数图,最终确定n的值.
题目答案为需要选用地球磁场,实验示意图如图9所示.
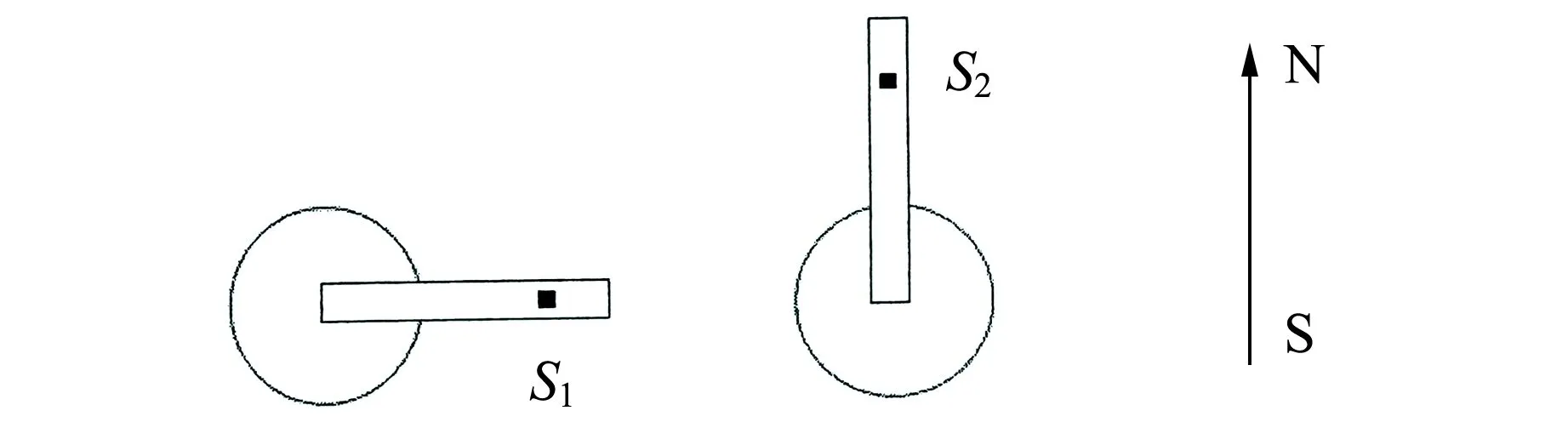
图9 测量n值的实验简图

3.4 实验D:GMR巨磁传感器的应用
3.4.1 D.1 地球磁场的测量
本部分要测量地球磁场水平分量的大小和地球磁场的大小、磁倾角. 磁倾角定义为地球磁场矢量BEarth与水平面之间的夹角θ. 为此,要将圆盘固定在水平面上. 传感器固定架用旋钮拧在圆盘上,通过旋转传感器固定架确定在与传感器灵敏轴成不同角度的方向上地球磁场水平分量的值. 通过绘制实验示意图,并依据测量数据求出用于计算地球磁场水平分量大小Bh的表达式,测量并计算出Bh. 然后将圆盘固定在高杆上,使圆盘在南北方向的垂直平面内. 传感器固定架拧在圆盘上. 旋转圆盘上的传感器固定架,确定在与传感器灵敏轴成不同角度的方向上地球磁场分量的值. 要求绘制实验示意图,并依据测量数据给出计算BEarth和磁倾角θ的表达式,测量并算出BEarth和θ的值.

(a) (b)

(c)

(d)图10 测量Bh,BEarth和θ的实验简图
3.4.2 D.2 直流功率计
本部分使用磁场传感器设计功率计的电路. 将传感器插入扁平线圈内. 因为扁平线圈与负载串联,所以其中的电流I与负载中的相同. 电流I产生作用于传感器的磁场,负载两端的电压U用于为传感器供电. 传感器的输出电压信号S用于确定负载中耗散的功率P. 双丝灯泡用作负载. 通过以不同方式使用灯泡的3个接线插口,可以获得多个负载电阻值RL.
由于组件的电阻和铁磁层的剩磁,通常即使没有外部磁场作用,磁传感器的惠斯通电桥也不平衡. 这时需要先平衡电桥,然后才能在功率计的电路中使用. 用旋钮将传感器固定架水平地固定在圆形板上. 传感器由电池以最高电压供电,使传感器垂直于地球磁场,观察万用表上的输出电压信号S. 如果S=0,电桥是平衡的,不需其他操作. 如果S≠0,电桥不平衡,需要将变阻器并联到a,b,c或d中的1个,调整变阻器以将S减小到零,此时电桥平衡,这个过程称为平衡. 如果使用变阻器也无助于平衡电桥,只需将传感器固定架旋转小角度即可,以使S降至S=0. 题目要求:绘制功率计的电路图,并使用连接盒连接电路;改变负载电阻RL并调节直流电流源的输出,以改变负载上的电压U,测量S和其对应的I,U以及P=UI的值,绘出P关于S的函数图,求出校准曲线P=f(S)的函数形式,并确定其系数的值.
需依题画出图11所示电路,根据测量数据得到P=kS的函数关系,k=0.026 W/mV.

图11 功率计的电路图
3.4.3 D.3 检测隐藏的电路
题目要求使用磁传感器制作用于查找隐藏电路的设备. 电路隐藏在印刷电路板的表面内. 粘贴在印刷电路板反面上的网格用作坐标系统. 将圆盘置于水平位置并固定在短杆上,传感器固定架拧在圆盘上. 将隐藏电路的印刷电路板平放在转台上. 将印刷电路板的导线连接到可调直流电流源,红色导线连接正极. 调节直流电流源以选择电路中的电流值. 要求通过相对于磁传感器移动印刷电路板,观察传感器输出信号S的变化,检测埋藏电路的位置和形状及其电流方向. 答案给出2块印刷电路板下面隐藏的电路分别是字母V和N的形状,如图12所示.
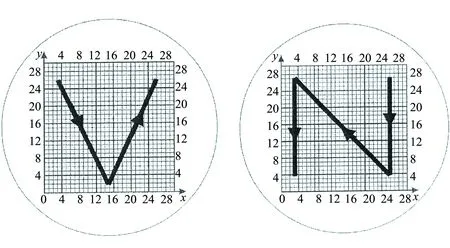
图12 埋藏电路的形状、位置及电流走向
4 赛题和中国队队员答题情况分析
试题A部分是纯理论计算题,中国队的队员基本能拿到满分. B部分有一定设计性,不同队员设计的方案不同,有的很有新意,但也有个别队员考试状态不好,出现了忽略并联电阻的低级错误. 后面测“未封装的 GMR 电阻随磁场的变化”时,有队员认为前面用到的是已封装好的传感器,所以有很长一段时间没明白未封装的GMR电阻是什么. C部分的S-B关系测量中,有队员对于电流I是否要取绝对值出现了错误,认为题目里一直提到电流“增大”,所以应该将电流取绝对值后再绘到图上,然而忽略了更重要的2个字“反向”,导致这道题出现了失误. D部分地磁场的测量在南开大学的培训中讲过,应该算是轻车熟路,但是有学生不知道前面提示的“偏置”有什么作用,一直没有使用永磁体. 此外,在测S-P关系时,有学生只注意到题目中说了“可以改变电阻来改变功率”,没有想到前面提到了电压是可以更改的,只采用了 4个数据点:R1,R2,R1+R2及R1R2/(R1+R2).
5 结束语
本次亚赛的实验考题只有1个大的题目,下分几个小的题目. 整体来说,虽然题目基于的巨磁阻概念对于学生有些陌生,但是实验所要求的电阻测量和惠斯通电桥等学生比较熟悉. 本届竞赛中评分规则出现了多处累计扣分,例如在C.3磁通量集中器的研究部分,如果没有选择地磁场而选择了其他磁场,则C.3部分的所有分数都会被扣掉. 希望在其他的类似竞赛中,评分规则设计得能够更针对全面考察学生的实验能力.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
科技资讯(2021年33期)2021-01-15
航空世界(2019年7期)2019-02-16
中国核电(2017年2期)2017-08-11
科技创新与品牌(2017年3期)2017-04-27
中学生数理化·高二版(2016年12期)2017-02-28
现代工业经济和信息化(2016年2期)2016-05-17
中国卫生标准管理(2015年4期)2016-01-14
