
磁控腹腔镜手术内置抓钳离合系统的设计
2018-08-09 10:02田波彦马佳刘豪付珊吕毅严小鹏
中国医疗设备 2018年8期
田波彦,马佳,刘豪,付珊,吕毅,4,严小鹏,4
1.西安交通大学第一附属医院 肝胆外科,陕西 西安 710061;2.西安交通大学第三附属医院(陕西省人民医院) 肿瘤外科,陕西 西安 710068;3.西安交通大学医学部 启德书院,陕西 西安 710061;4.陕西省再生医学与外科工程研究中心,陕西 西安 710061
引言
腹腔镜微创手术可有效减少手术创伤,促进患者术后快速康复,是现代普通外科重要发展趋势。减少腹部戳卡数量和术后戳卡瘢痕对腹腔镜微创手术提出了更高的要求。减戳卡手术是腹腔镜微创手术再微创发展思路之一。但是以牺牲操作的便捷性和安全性为代价的减戳卡技术是有违外科技术健康发展的。因此,如何在满足便捷安全的操作前提下来实现减戳卡,是需要外科医生深入研究的问题。借助人体自然腔道可减少体表戳孔,从外在实现了减戳卡,但这并非正真的减戳卡技术,只是把穿刺孔从腹壁转移到了空腔脏器,这反而增加了手术操作难度及术后并发症的发生率[1]。
近些年,磁外科(Magnetic Surgery,MS)技术发展迅速,已形成了以磁压榨技术(Magnetic Compression Technique,MCT)、磁锚定技术(Magnetic Anchor Technique,MAT)、磁导航技术(Magnetic Navigation Technique,MNT)、磁悬浮技术(Magnetic Levitation Technique,MLT)四大技术为核心的框架体系。磁锚定技术(Magnetic Anchoring Technique,MAT)是借助“非接触性”磁场力,利用体外磁体(或腔外磁体)对体内/腔内磁体(或顺磁性材料)进行“非接触性”牵拉固定,以满足外科手术或内镜操作需要的磁外科技术,其中体外磁体(或腔外磁体)称为锚定磁体;体内/腔内磁体或(顺磁性材料)称为靶磁体。借助磁锚定技术可实现减戳卡手术。通过锚定磁体对靶磁体进行牵拉固定可取代腔镜手术中牵拉暴露抓钳的操作,从而实现减戳卡的目的,目前已有报道相关研究报道[2-3]。但是,磁锚定辅助减戳卡手术实施的关键在于有能够便捷实现内置抓钳与操作杆离合的操作器械。内置抓钳与操作杆的离合可依靠机械结构来实现,但此种依靠机械结构控制离合的效率一般较低,操作起来便捷性较差。为此,我们设计发明了基于磁锚定技术的减戳卡手术的磁控腹腔镜手术内置抓钳离合系统。
1 设计思路
内置抓钳快速便捷离合功能的实现是基于MAT的减戳卡手术的关键。我们的设计思路是在腹腔镜内置抓钳的尾部和操作钳的头部分别安装钕铁硼永磁体来完成内置抓钳与操作杆的结合,同时在操作杆头部和手柄处设置连锁牵拉机构来实现内置抓钳与操作杆的分离。使用时,内置抓钳尾部磁体与操作杆头部的磁体相吸后,经主操作孔置入,内置抓钳钳夹组织后,启动连锁牵拉机构,内置抓钳就可与操作杆分离。
2 基本结构
2.1 内置抓钳
内置抓钳内部结构,见图1,其结构包括套杆,套杆尾部有圆环状第一磁体,在套杆内部有弹簧片,弹簧片头端为夹头,弹簧片尾端有卡头,套杆内有卡钉,卡钉和卡头固定弹簧的两端,套杆尾部和第一磁体有第一通孔,第一通孔贯穿套杆尾部和第一磁体,经套杆的内部可通至卡头。
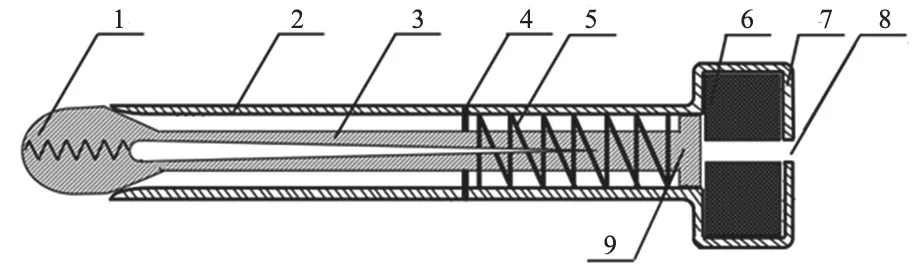
图1 内置抓钳结构示意图
2.2 操作钳
操作钳内部结构,见图2,包括操作杆,操作杆内有实心圆柱状的推送杆,操作杆头部内有第二磁体,固定座与操作杆尾端牢固连接,并套于操作杆上,U形的手柄的两端分别固定连接于固定座及推杆座上。内置拉杆头部与第二磁体牢固连接,尾部穿过固定座后与滑动座牢固固定,操作杆尾端穿过固定座和滑动座后嵌套于推杆座内,滑动座能沿操作杆轴向滑动,曲臂上端与滑动座牢固固定,前端穿过连接座与拉环相连接,曲臂在连接座内可前后移动;操作杆的前部设置有第二弹簧,自然状态下第二弹簧的弹力保持第二永磁体位于操作杆的头部;操作套杆头部和第二永磁体有第二通孔,第二通孔贯穿操作杆头部和第二永磁体,供操作杆穿过。
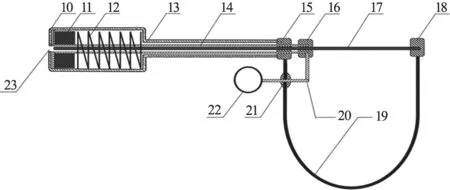
图2 操作钳结构示意图
3 工作过程
(1)术中使用时,第一磁体和第二磁体之间的吸力可使操作杆头部与内置抓钳尾部相吸对合,见图3。
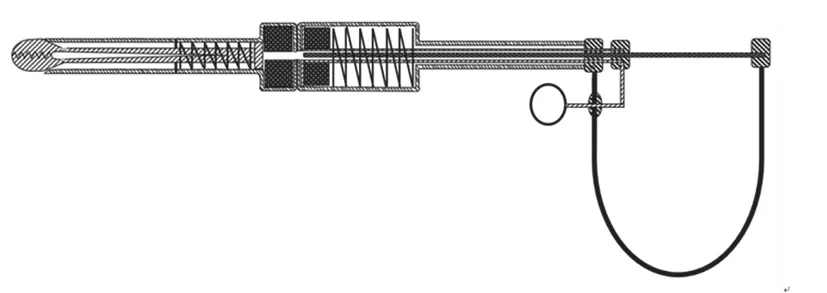
图3 内置抓钳与操作钳结合的状态示意图
(2)将操作钳和内置抓钳经腹壁戳孔置入腹腔,挤捏手柄时,推杆座推动操作杆移动,并依次穿过第二通孔和第一通孔,与弹簧片尾端的卡头接触,并克服弹簧的弹力,推动弹簧片向套杆头端移动,见图4。此时,夹头张开可钳夹组织。
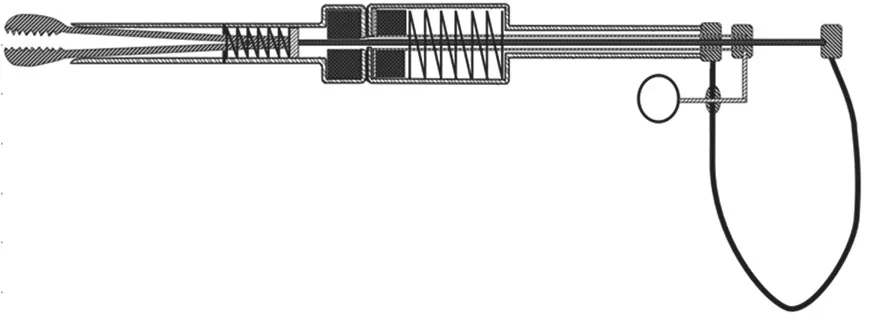
图4 操作杆控制抓钳的示意图
(3)夹头内钳夹组织后,松开手柄,弹簧舒展,弹簧片向套杆端移动,夹头则可咬紧组织。
(4)拉动拉环,拉环通过曲臂带动内置拉杆,内置拉杆头端带动第二磁体克服第二弹簧的弹力,远离第一磁体,随着第一磁体和第二磁体距离的增大,吸力减小,操作钳头端则与内置抓钳尾端实现分离,取出操作钳,内置抓钳被留置腹腔内,见图5。
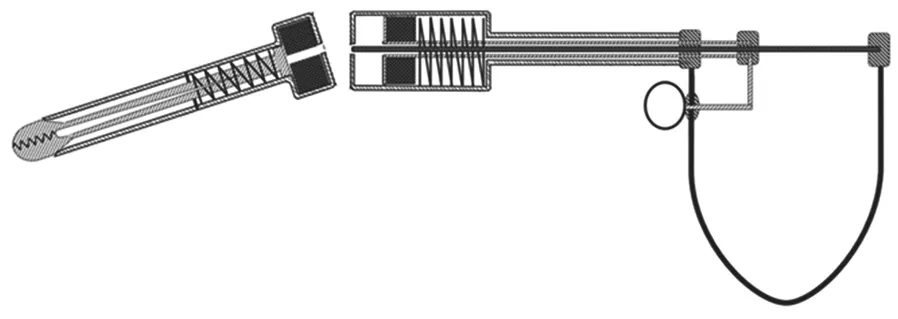
图5 操作杆与内置抓钳分离的示意图
当需要更换内置抓钳的钳夹位置或需要取出内置抓钳时,重复上述步骤即可。
4 应用效果
磁控腹腔镜手术内置抓钳及操作杆试验样件,在体内外进行了相关实验性验证。体外实验表明操作杆头端与内置抓钳尾端靠近时,操作杆头端的永磁体与内置抓钳尾端的永磁体可迅速精准对位吸合,使操作杆与内置抓钳成为整体,并且这两个永磁体之间的吸力远大于推动杆推动弹簧片的摩擦力,能够使内置抓钳的钳头根据需要任意张合,拉动拉环使操作杆头端的永磁体克服磁性吸引力后移,然后操作杆与内置抓钳分离。实验犬体内实验显示,内置抓钳和操作杆能顺利通过腹壁戳卡,钳头可牢固抓持组织,内置抓钳尾端可被体外腹壁的锚定磁体牢固锚定。体内外试用结果表明磁控腹腔镜手术内置抓钳离合系统能满足临床操作。
5 讨论
腹腔镜手术是目前腹部外科疾病微创化治疗的主要途径。减戳卡手术是腹腔镜手术再微创化的研究趋势之一。缝线悬吊辅助技术可减少腹部戳卡数量,可作为减戳卡手术的一种方法[4-6],但其缺点是组织一旦被缝线悬吊后其牵拉方向基本固定,术中如需再改变组织牵拉方向就较为困难,因此其灵活性大大折扣,临床应用价值不高。单孔腹腔镜手术对腔镜手术器械要求高、操作过程中存在各个操作杆之间相互干扰的问题[7],临床难以普及。
近些年磁外科(Magnetic Surgery,MS)技术发展迅速,其临床应用范围不断拓展,根据磁外科技术临床应用原理的不同,目前磁外科已发展成了以磁压榨技术(Magnetic Compression Technique,MCT)、 磁 锚 定 技 术(Magnetic Anchor Technique,MAT)、磁导航技术(Magnetic Navigation Technique,MNT) 和 磁 悬 浮 技 术(Magnetic Levitation Technique,MLT)为核心的框架体系。磁外科相关技术已用于血管吻合[8-11]、胃肠道吻合[12-15]、胆肠吻合[16-17]、食管狭窄/闭锁再通[18-19]、胆管狭窄/闭锁再通[20-21]、治疗性造瘘[22-23]、瘘口修补[24-25]、腹腔大血管血流阻断[26]、抗胃食管返流[27]、辅助内镜下粘膜剥离术[28]等。
为此我们提出了磁控离合设计方案。磁控腹腔镜手术内置抓钳离合系统的设计方案具有以下优点:① 离合控制方便,依靠磁体之间的自然吸力,可实现操作钳与内置抓钳的结合;② 推杆及弹簧片设计使内置抓钳钳口张合便捷;③ 磁体吸力与随磁体间距增加而减小,利用该特性,通过改变操作钳头部磁体的位置可方便控制内置抓钳的离合;④ 该结构设计巧妙,加工简单,操作方便;⑤ 借助该装置可实现真正意义上的减戳卡手术。
磁锚定已是成熟技术,但若缺乏与磁锚定技术配套的能够满足不同使用需求的手术器械,磁锚定技术将失去用武之地。磁控腹腔镜手术内置抓钳离合系统的设计研发巧妙借助磁锚定技术的优势实现了减戳卡临床需求,在临床上有很大推广应用前景。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
江苏安全生产(2022年6期)2022-07-29
现代交通与冶金材料(2022年3期)2022-06-15
港口装卸(2022年1期)2022-03-10
湖北汽车工业学院学报(2021年4期)2022-01-11
今日农业(2021年2期)2021-03-19
中国医疗设备(2019年3期)2019-03-15
航天器工程(2019年1期)2019-03-06
中国设备工程(2019年9期)2019-01-17
振动工程学报(2017年6期)2018-04-11
