基于DSP的旋转变压器角度解码方法
2018-08-07 08:12湖南工业大学电气与信息工程学院易吉良吕道轩
电子世界 2018年14期
湖南工业大学电气与信息工程学院 周 曼 易吉良 吕道轩
0 引言
作为伺服系统的转轴位置和速度传感设备,旋转变压器(以下简称旋变)具有坚固耐用、宽工作温度、抑制共模噪声等优点,能够在严酷环境中稳定工作,广泛应用于轨道交通、新能源汽车以及具有严格安全要求的航空等工业领域。目前针对旋变解码有两种解码方法:一种是硬件的解码方法,主要是专用解码芯片--旋变数字转换芯片(resolver to digital convertor,RDC)。这种芯片解码精度高,且能够提供旋变所需的激励信号,但这种方法最大的缺点是成本高,一片RDC甚至与旋变的价格相当。另一种是软件的解码方法,可分为反正切法和角度跟踪法(angle tracking observer,ATO)。
本文针对旋变的工作特性,设计外部信号调理电路和解码系统,并通过TMS320F28335实现,然后再仿真软件上验证方法的准确性。
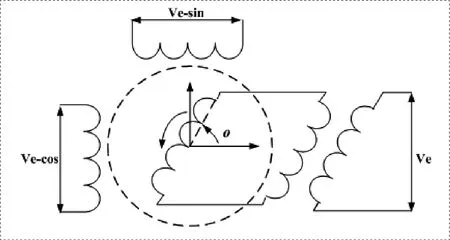
图1 旋转变压器原理图

图2 旋变输入、输出信号波形图
1 旋转变压器工作原理
图1所示说明了最常用旋变的工作原理,安装在旋变转子的激励线圈输入高频激励信号Ve,产生交变磁场。正交安装在旋变定子的正弦线圈和余弦信号线圈感应激励线圈磁场产生交变电压Vesin和Ve-cos,其幅值与旋变转子位置有关。图2所示是旋变输入激励信号和输出正弦、余弦信号波形图,相应的表达式如式(1),k表示旋变的变压比,ω表示励磁电压频率,为旋变输出的角度可以看出,随着旋变转动,旋变的两路输出信号的包络被调制为正弦和余弦信号。旋变解码的任务便是从两路输出信号解算出旋变的角位移,进而解算出角速度,以获得电机转速。

根据式(1)电机转子位置角度可以通过求取正弦信号和余弦信号比值的反正切函数求得,如式(2)所示。

取N个相邻采样点的转子位置角,求出角度增量,则可由式(3)得出旋变转速。

其中,T为采样周期。
2 系统设计
2.1 外部电路设计
外部电路设计分为三个模块,分别是激励信号产生电路、调理电路和输出信号调理电路。
输入信号调理电路通过DSP的TIME0定时器和电平转换电路产生幅值5V,频率10kHZ,占空比为50%的方波信号,再通过积分电路转换三角波信号,最后经过正弦波产生电路变为正弦波。正余弦信号调理电路主要包括滤波电路、单端信号转换电路和绝对值加法电路。经过信号调理后的正余弦信号经DSP的AD端口采集,再由解码算法解算出转子位置信息。
2.2 数字系统设计
解算角度信息方法采用二阶跟踪法,即角度跟踪法(ATO)的一种,其数学模型如图3所示。其中,为旋变输入角度值,Φ为估算的角度值,e是误差信号。该二阶系统能够无差地跟踪速度信号。观测器对旋变输出信号和估计值进行比较,通过缩小实际值和估计值的误差,使两个变量达到一致,最后取这个值就是旋变的角度值。
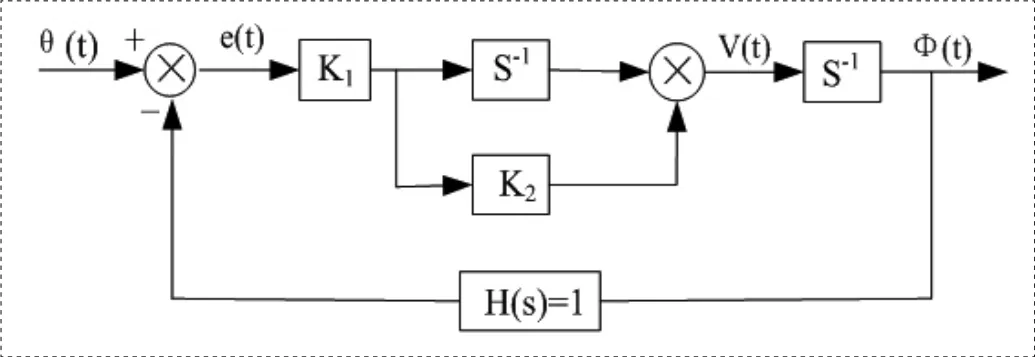
图3 系统ATO模型图
3 仿真及实验结果验证
为验证该系统的可行性,对该解码系统进行了实验验证,解码系统平台如图4所示,由此系统,设计电动机带动旋转变压器的转子分别以200rad/s、1000rad/s、4000rad/s
的速度旋转,频率为1kHz,记录由该系统的实验结果并与设计的转速比较,由表1表明,实验检测的旋变转速与设定的转速误差在0.06%以内,并且随着转速的增大,误差越来越小,可以看出,该解码系统能实现旋变的快速,准确的位置解码。

图3 解码系统测试图

表1 测量结果及误差
4 结论
以高性能伺服系统的位置和速度检测为对象,以构建低成本高精度实时旋变解码方法和系统为研究目标,研究针对旋变信号的二阶观测器,搭建基于DSP的旋变信号解码系统,能够无缝嵌入电驱动控制系统,实现低成本高性能的旋变解码方案。
猜你喜欢
中国石油石化(2022年12期)2022-07-16
今日农业(2021年19期)2021-11-27
基层中医药(2021年5期)2021-07-31
今日农业(2020年13期)2020-08-24
中国外汇(2019年19期)2019-11-26
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
今日农业(2019年16期)2019-01-03
中学数学杂志(高中版)(2016年6期)2017-03-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27