基于L4级技术开发面向量产的ADAS
2018-08-04 04:59
海外星云 2018年15期
自动驾驶汽车大势确立后,新的机会出现,等待有能力的企业抓住,在整车厂不擅长的人工智能、技术应用领域大展身手。Waymo、百度、Uber等大公司“一步到位”,切入L4级,其中技术安全、适应性强、落地快的将有机会胜出;更多的初创公司切入L3及以下级别的技术,以服务整车厂为主,这群可以称为“中国的博世们”的初创公司,他们比的是谁的技术更强、谁先量产,L4级技术是他们在当前立即可商用的L2与L3市场率先卡位的武器。
在此其中,系出百度自动驾驶团队的“领骏科技”就是基于L4的技术,以“减法”为产品策略思维,在完整L4原型产品架构开发之后,直接将这套多层级的方案降维至L2/L3级别应用。领骏科技目前已经完成L4级自动驾驶系统原型车开发,汽车可以完成自主车道切换及超车、通过隧道、环岛、收费站。
这家公司由百度无人车初始团队成员杨文利博士创立。他在清华大学拿到自动化专业学士和硕士学位,后于美国宾夕法尼亚州立大学获得电气工程博士学位。博士毕业后,担任美国西部数据公司系统架构部高级首席(Senior Principal)工程师。
2014年,杨文利博士回国加入百度深度学习研究院,向当时的百度深度学习研究院(IDL)负责人余凯汇报。之后作为初始成员进入百度自动驾驶事业部,担任无人车决策、规划、控制、仿真系统的技术负责人、主任架构师。
搭载领骏科技L4级自动驾驶系统的汽车
具备量产形态!尽快将技术在L2/La级自动驾驶落地
DT君本月试乘了搭载领骏科技L4级自动驾驶系统的汽车,这辆车由国产传统动力SUV改装而成,不是常见的用于无人车改装测试的林肯MKZ。从外观来看,这辆车头顶上没有显眼的激光雷达,与市场上销售的汽车几乎没有差异。
但在这辆车前方加装了来自德国IBEO的4线激光雷达,车身四周加装了毫米波雷达,挡风玻璃后面安装了摄像头。各传感器分工方面,摄像头负责收集红绿灯信号和识别车道线,而激光雷达、毫米波雷达负责收集周围环境、车辆、行人等障碍物信息、进行测距和测速工作。
计算设备负责处理传感器收集到的数据,并进行决策。这部分设备一般放在无人车后备箱中,领骏的无人車也是如此。值得指出的是,多数无人车后备箱中放置着巨大的计算以及配套的散热设备,而领骏科技的计算设备占据非常小的空间,被放在后备箱底部盖板下面,这样车主可以有一个完整的储物空间。并且,计算设备的散热量很小,领骏的无人车连续运行几个小时后,计算设备也只是稍微有些温热,用手感知,低于iPhone充电时候的温度。
杨文利透露:创业初期就确定的“可量产”原则一直在指导着他们的产品设计:“我们最初版本就是瞄准可量产可用的,可以前装生产并真正被人们使用,并且产品从一开始就具有多层级的软硬件架构”。相比从零开发出完全自动驾驶汽车的Waymo,杨文利更愿意将领骏科技的路线比作逐步迭代的特斯拉,因为“这样才符合工业化的趋势、符合技术发展的一般途径”。
杨文利进一步解释,体现在产品上,首先就是采用已经量产的汽车专用传感器,比如IBEO的激光雷达,目前已经在奥迪A8上面量产;其次使用多传感器融合架构,并通过各种模型抽象和算法优化,实现很轻量级的计算处理单元部署,可以把计算设备藏在汽车车身内部,而不需要占据车内乘坐和储物空间。
DT君试乘时天气有些阴,但整体可见度较高,大部分时间城区道路车辆不多,行人很少,收费站和环岛车流复杂,行驶全程约20分钟。领骏科技的汽车能在正常车速下完成自动驾驶,高速上行驶时速度达到70km/h-80km/h,杨文利骄傲地解释说这样的车速“可以自然融入车流”,不会一直被其他汽车超车。除保持车道和识别红绿灯之外,此无人车还可以自主规划路径、在转弯时提前变道、其他车辆并道时自动减速保持车距、自主超车、通过高速收费站、隧道、和环岛,这些已经是国内自动驾驶企业要解决的非常复杂的场景。值得指出的是,汽车行驶过程中加速、在遇到其他车辆并道时的减速情况下稳定流畅,过程中汽车没有突兀让乘客感觉不舒服的行为。
杨文利认为领骏科技的优势在规划、决策、和控制,“就像很多人类新手司机在环岛都觉得压力很大,虽然环岛中的每一辆车都看得很清楚。所以这是决策控制方面的问题。”的确如此,杨文利一直到博士毕业都在研究自动化、控制系统,毕业后更是在硬盘控制、车辆控领骏科技L4自动驾驶系统仿真界面截图汽车电子供应链各层级主要玩家分布制方面积累经验。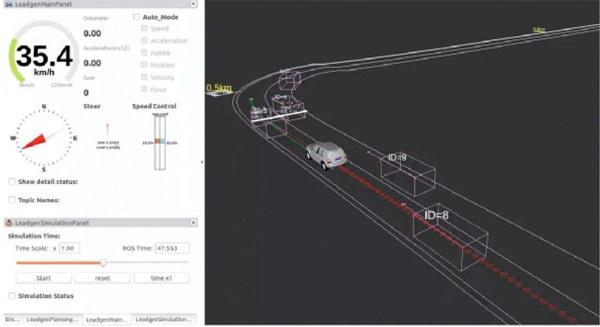
领骏科技L4自动驾驶系统仿真界面戴图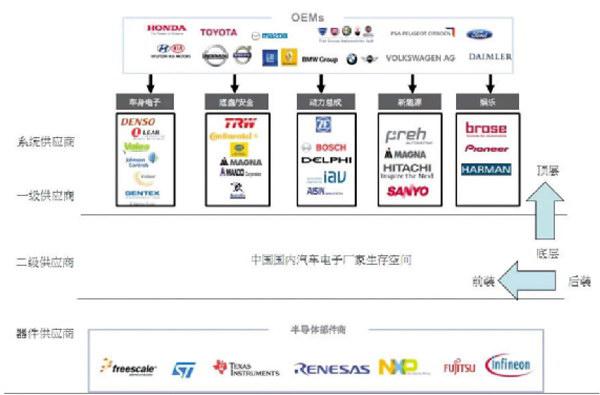
汽车电子供应链各层级主要玩家分布
至于在传感器成本有限情况下保障安全,得到可靠结果,领骏科技依靠系统工程理论。“系统工程的一个重要论断就是可以用多个不可靠的系统组合成一个可靠的系统,彼此互相补足、互相验证。领骏科技的系统通过软硬件优化把多个不完美的信息融合到一起,就会得到一个可靠的结果,这就是系统工程。”
领骏科技接下来的科研重点有两个方面:一方面是继续巩固量产形态的优势,提高集成度和符合车规,在下一台测试车上部署的方案,整个计算单元甚至可以完全被隐藏起来。另一方面,完成深度学习、强化学习架构的部署,用数据和自我进化让整套自动驾驶系统迭代的更智能、安全和舒适。
自动驾驶路径争论中,从1.4级“降维”是最快的量产途径
毫无疑问,各家企业最终的目标都是实现真正自主的L4级自动驾驶,不过,他们在实现路径方面的观点大相径庭。整车厂、供货商主张渐进式道路,希望从辅助驾驶起步,积累数据,慢慢过渡到完全自动驾驶,这一类包括特斯拉、通用等公司;而Waymo等互联网公司主张一步到位,专注开发完全无需人工干预的无人车,也有声音认为从L2/L3过渡到L4的办法走不通。
对于不同自动驾驶级别之间的关系,杨文利表示,“L4级是一套统一的决策架构,传统ADAS系统是分散的架构,所以确实在架构上面有很大的区别。但是,L4级一定具备L2/L3的功能,基于L4开发辅助驾驶功能,做减法降维比较容易,并且可行。”
他接着解释说,L1-L3主要是单功能的架构,比如自动紧急制动系统(Autonomous Emergency Brake,AEB)是用一个装在车前的摄像头或者毫米波雷达测量与前车的距离、相对速度,发现前面有一辆车时决定踩或者不踩刹车;而L4中的决策是基于多种复杂的交通和环境信息,比如说发现前面有辆低速的车,就要考虑是不是应该超车,超车的时候又要考虑左侧是不是有车,即便左侧没车的话,还要考虑一会儿是不是要右转,这些都要综合考虑到才能做出的决定。
领骏科技计划为整车厂提供lJ2、L3级的辅助驾驶系统,主要通过前装的方式实现,之后渐进式的升级迭代至L4级自动驾驶。在DT君來看,杨文利和领骏科技的优势在于自动化控制背景和负责量产产品的经验。他的自动化优势表现在产品上是原型车控制系统和自动驾驶覆盖场景领先;可以预测,他在西部数据负责量产硬盘的经验将有助于领骏产品量产的各个方面。
意图取代国际供应商,为国产车提供辅助驾驶技术
汽车电子的供应体系有四个层级,离车厂由近到远依次是系统供应商、一级供应商(Tier1)、二级供应商(Tier 2)、器件供应商。根据国泰君安证券统计,系统供应商及Tier 1由国际厂商主导。
随着自动驾驶趋势越来越近,布局或早或晚的Tier 1厂商也推出了自动驾驶方案,比如博世、大陆、德尔福、采埃孚,而中国在这个领域再次缺席。杨文利认为,“目前中国没有成熟的自主技术,大部分国产车的L2/L3辅助驾驶功能还依赖进口。缺点一方面是价格高,一方面是这些辅助系统收集大量道路数据,它在中国能收集数据的程度面临管控问题。”
领骏科技向车厂提供两种方案,分别属于Tier 2和Tier 1。Tier 2产品是指,只提供决策计算平台设备,有标准接口可以输入各个传感器的数据,并与车辆底层相连。Tier 1是指,根据车厂对车型的产品定位、预期功能、汽车情况提供个性化的整套解决方案。
除了前面提到的乘用车解决方案,领骏科技为了更快进行商业化落地,计划从干线物流的货运市场入手,打造货车的辅助驾驶方案,利用自身的车辆控制优势帮助商用车减少人力成本和油耗成本。目前,他们的A轮融资也即将完成。(摘自《深科技》)(编辑/华生)
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
中国计算机报(2020年26期)2020-08-04
诗潮(2019年8期)2019-08-23
小哥白尼·趣味科学画报(2019年12期)2019-02-28
海峡摄影时报(2017年6期)2017-06-10
发明与创新·中学生(2017年4期)2017-03-31
科学大众(中学)(2016年8期)2016-05-14
中国总会计师(2015年5期)2015-06-16
中国信息化周报(2014年41期)2014-11-07
中国高新技术企业(2012年8期)2012-06-04