GPS测量技术在陕西省地下水监测站高程引测及坐标测量中的应用研究
2018-08-03 03:42,
地下水 2018年4期
,
(陕西省地下水管理监测局,陕西 西安 710003)
开展地下水监测站高程引测及坐标测量工作,其目的是为了将所监测到的地下水动态埋深资料转化成地下水水位资料,绘制地下水水位等值线图等。进而分析地下水资源的时空变化规律,为地下水资源的合理开发和科学利用提供科学依据。同时,地下水监测站位置坐标测量,可以精确反映监测站的位置和分布情况,为后期地下水监测站网的规划布设及优化调整提供准确详实的基础性依据。根据《国家发展改革委关于国家地下水监测工程初步设计概算的批复》(发改投资[2015]250号)和水利部、国土资源部关于国家地下水监测工程初步设计报告的批复(水总[2015]250号),陕西省核定完成558处监测井建设任务,地下水监测站的高程引测及坐标测量工作是陕西省项目建设的一部分。站点分布为:关中片区383处,陕南片区67处,陕北片区108处,全省合计558处,详见表1。

表1 陕西省地下水监测站高程引测及坐标测量数量统计表
1 相关概念
校核水准点:是指埋设在每个地下水监测站附近,用于监测站高程及坐标接测、复测的固定水准点。
附近地面:监测井口附近,用于计算地下水埋深的自然地坪。
井口保护筒固定点(高程点):是指固定于井口保护筒内侧,既有利于监测工作又不易脱落的永久性标志。
2 测量方案选取
纵观陕西省监测站点分布特点,南至陕南秦巴山地汉中、商丹盆地,北至陕北黄土高原及北部风沙滩区,跨省内多个地貌及水文地质单元,甚为分散。按照《地下水监测工程技术规范》(GB/T 51040-2014)的规定:基本水准点高程,应从不低于国家三等水准点按四等水准测量标准接测,引测的国家水准点,在复测或校测时不应更换;校核水准点高程,应从不低于国家三等水准点或基本水准点按五等水准测量标准接测;监测站井口固定点高程和监测站附件地面高程,可从基本水准点或校核水准点按五等水准测量标准接测。考虑到陕西省现状地下水监测站分布广、单站距离远,引测点较远、通视性条件差等因素不适合常规人工水准测量,并且该方法费时费力,不适用于通视性条件差的站点高程引测,直接影响测量工期。经过多个测量方案比选后,决定采用GPS静态定位测量与水准测量相结合的方法完成。可先通过建立E级GPS测量控制网进行静态定位,并同步已知等级水准点进行GPS高程拟合联测,获取校核水准点的高程及坐标值,再用水准测量的方法完成附近地面高程和井口保护筒固定点高程的测量。GPS拟合高程计算精度可以达到地下水监测工程技术规范》(GB/T 51040-2014)中五等水准及以上精度要求。
3 测量方案实施
3.1 资料收集
根据任务需要,并充分考虑测区范围及精度控制因素,收集测区范围内1980西安坐标系GPS控制点102个,1985国家高程基本水准100个,详见表2。
3.2 GPS组网及观测
测量环节的关键是组网,主要考虑已知水准点和被测GPS点的关系,以期得到最优布测方案。综合精度要求、卫星状况、接收机类型和数量、测区已有资料、测区地形和交通状况及作业效率,直接以市级行政区域划分GPS联测网,分别组成十个GPS区域联测网,同时为了有效控制测量误差,以半径约50公里区域为单元进行GPS联测,在每个GPS联测网范围边上最少选择3个(每个时段把校核水准点包含在里面)陕西省C级以上等级的 GPS点,观测时省级GPS点全天连续观测,范围内使用8台(47个时段用10台)GPS接收机静态观测,观测组网按边连接方式构网GPS观测前按星历表的卫星健康情况确定具体观测计划、选取GPS观测最佳时段,根据不同的观测要求对接收机的设置进行全面检查和预置。GPS观测中必须满足的条件有:GPS接收机类型采用双频接收机;有效卫星颗数不少于4颗;静态同步测量时间不少于45 min;静态采样间隔10~30 s;滚动站与基站的距离10 km内;对天通视良好,10°以上无成片障碍物;测量时无微波或无线电信号干扰,实际操作中GPS观测各项技术要求,详见表3。
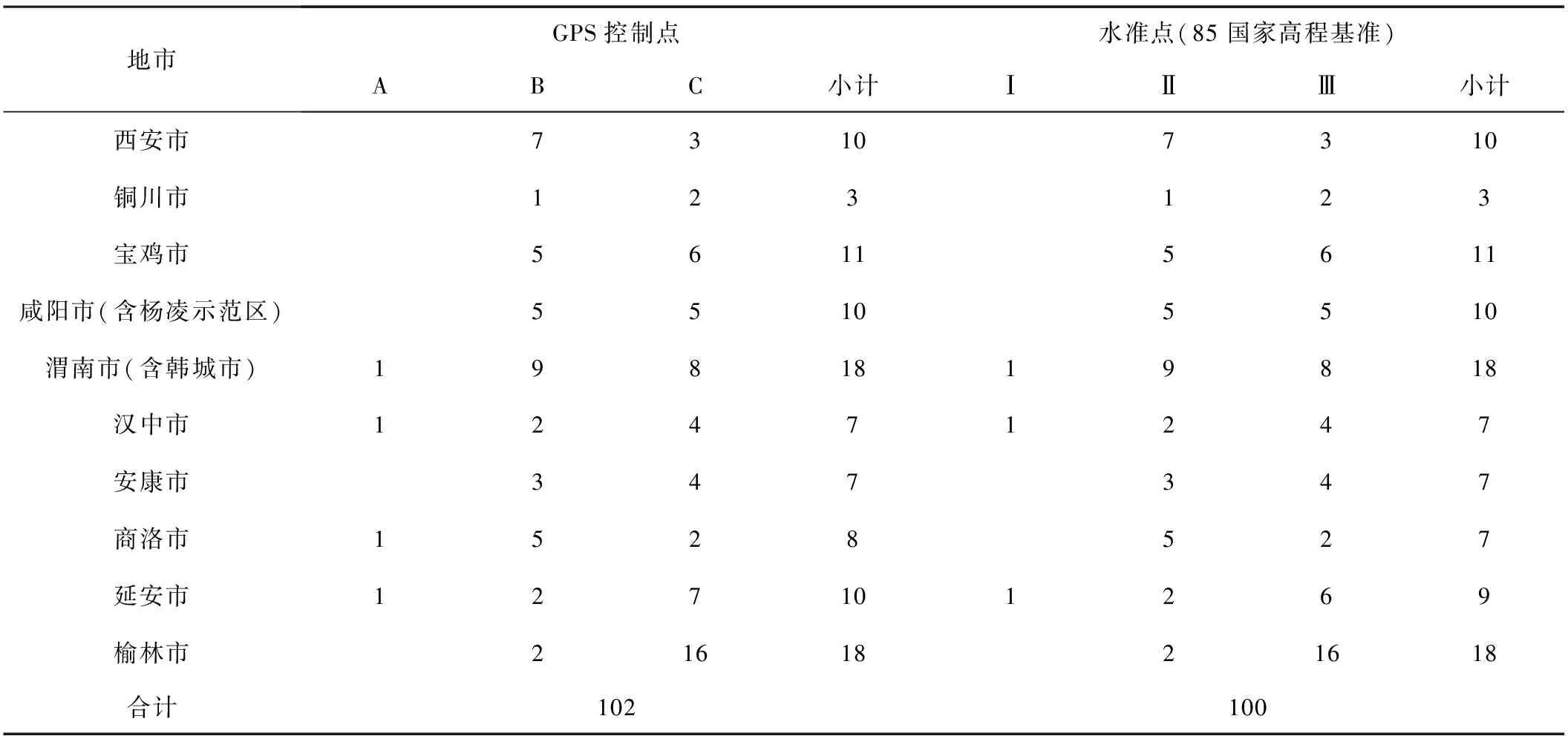
表2 陕西省控制点收集表

表3 GPS观测技术要求比对
3.3 数据计算
GPS基本水准点高程,直接引用国家Ⅲ等以上水准点;校核水准点高程,满足GPS观测要求的采用似大地水准面计算理论中的“移去恢复法”,使用最新的EGM2008模型,以观测区域为单位,通过计算已知高程点的WGS84框架各瞬时历元下高程异常,并查询其EGM2008下大地水准面差距,以计算高程异常和大地水准面差距之差(残差),作为内插基础,以各监测点至各已知高程的距离平方倒数定权,内插获取各监测点残差,然后同监测点EGM2008模型下大地水准面差距,恢复获取监测点高程异常值,带入大地高,从而获取监测点85高程。实施过程中,发现本次校核水准点和井口固定点距离普遍不大于10 m,不利于四等水准测量,校核水准点不满足GPS观测要求,所以就近选取过渡点(满足GPS观测),利用水准仪以四等水准观测要求从过渡点引测高程到校核水准点。井口固定点和监测站附近地面高程在测区GPS平网的基础上计算出七参数,用RTK测量,个别点不满足RTK测量的采用三角高程测量其高程。观测组网按边连接方式构网。重复观测点数量满足《全球定位系统(GPS)测量规范》中大于等于1.6倍的要求,详见表4。
数据计算以同步观测时段为单位,每个时段采用多基线模式解算。为了满足后续平面和高程成果计算要求,每个分区都进行了框架网和区域网两次基线解算。进行框架网解算时,纳入IGS跟踪站和区域框架点,采用长基线解算策略,考虑天顶延迟、海潮模型,使用Saastamoinen对流层延迟模型PWL分段线性法处理等影响,进行精密计算获取高精度基线向量。进行区域网解算时,仅解算区域框架点和监测点,不考虑海潮模型、天顶延迟等影响,以提高运算速度、减少干扰。计算结果如下:(1)重复基线:长度差值比较,每部分第一行为参考基线及长度差限差(mm),后续为重复基线及其与参考基线的差值(mm)。检测合格数16条,最大误差15.547 2 mm 最小误差0.163 mm;(2)同步基线文件:检测合格数25条,相对误差限制15.00 ppm,相对误差= 2.49 ppm ;(3)异步环闭合差:检测合格数483条,相对误差限制22.50 ppm,相对误差= 2.25 ppm
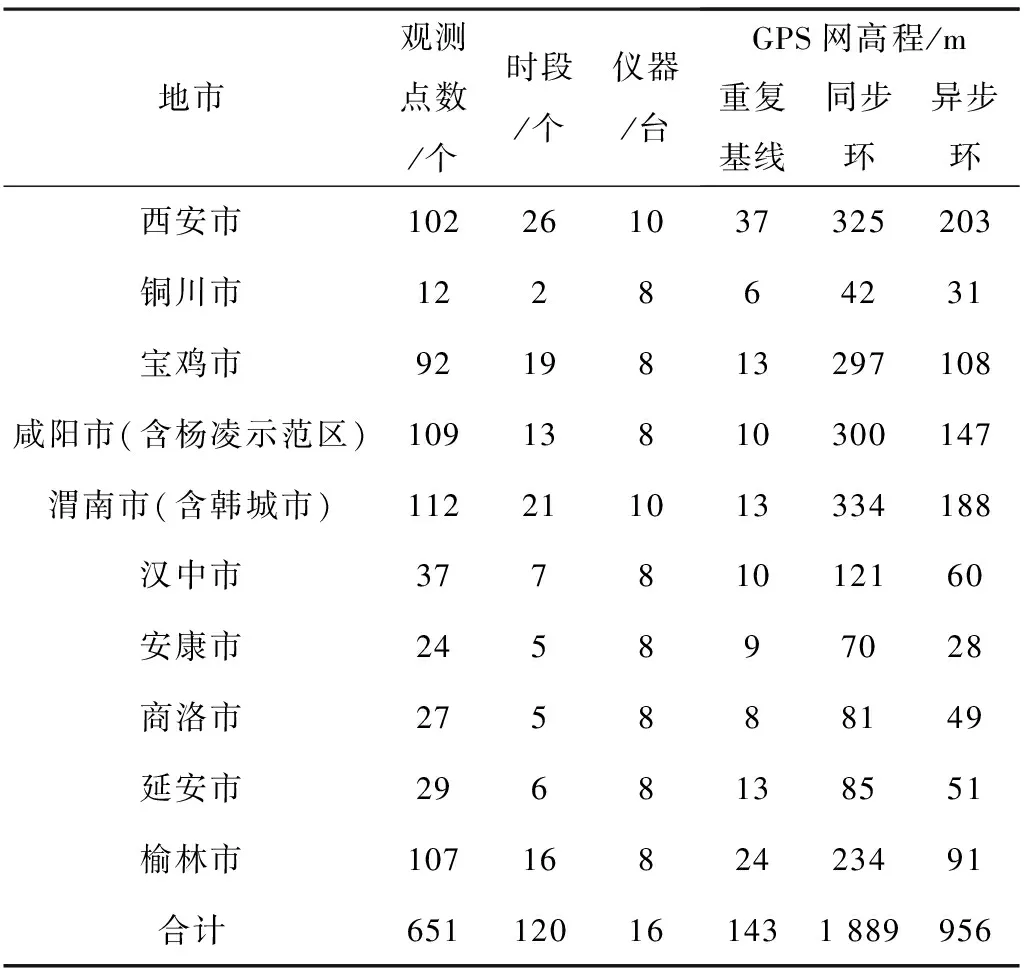
表4 GPS网观测信息汇总表
注:观测点数含已知点,不含重复观测点数,GPS仪器交错使用。
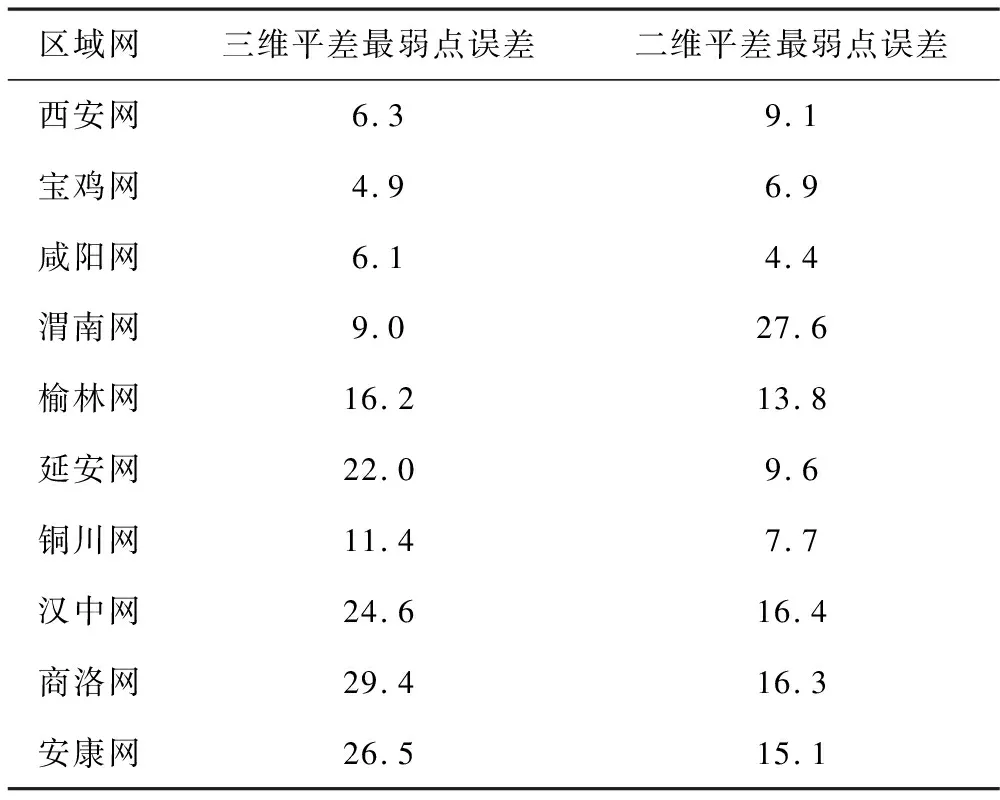
表5 各区域平面精度汇总表 mm
3.4 平面精度统计
每个时段观测标准化均方根误差nrms以小于0:4周为基本解算要求,并在此基础上进行异步环、重复基线较差等检验。由于gamit软件为多基线解,故而各时段同步环闭合差均为0。
网平差使用武汉大学研制CosaGPS5:21平差软件,按区域进行计算。方法为:(1)三维网平差,通过对IGS跟踪站进行匹配检验,以不超过10 mm的站为基准,获取各分区框架点的WGS84瞬时三维坐标;(2)二维网平差,以区域框架点为约束,进行监测点三维坐标计算。再以框架点的1980西安坐标进行约束,平差获取各监测点的西安1980坐标。各区域网西安1980坐标系下最终平面精度统计,详见表5。
3.5 高程精度统计
由于测区已知点和监测点的位置分布不均匀和数量的局限,若采用常规拟合方法,不足以获取准确高程异常。为了解决这个问题,借鉴似大地水准面计算理论中的“移去恢复法”,采用最新的EGM2008模型,以观测区域为单位,通过计算已知高程点的WGS84框架各瞬时历元下高程异常,并查询其EGM2008下大地水准面差距,以计算高程异常和大地水准面差距之差(残差),作为内插基础,以各监测点至各已知高程的距离平方倒数定权,内插获取各监测点残差,然后同监测点EGM2008模型下大地水准面差距,恢复获取监测点高程异常值,带入大地高,从而获取GPS点的85高程。本测量工作拟合高程模型分别进行了模型内、外符合允许高程中误差计算,其模型内高程中误差为26 mm,模型外高程中误差为43 mm。计算结果符合《水利水电工程测量规范》(SL197-2013)有关内容五等水准测量精度要求,模型内符合允许中误差五等为±30 mm,对于模型外符合允许中误差五等为±50 mm。
4 结语
国家地下水监测工程(水利部分)陕西省地下水监测站高程引测及坐标测量工作从实施至结束仅仅用时40多天,GPS测量技术的使用,大大缩短了项目工期,节约了大量的人力、物力资源。只要选择适合项目特点的GPS测量技术设计方案,进行科学合理的数据处理解算,其精度控制完全能够《地下水监测工程技术规范》(GB/T 51040-2014)中测量的要求。GPS测量方法因其技术可靠、全天候、高效率、操作简便等特点可以在今后地下水监测站的测量中广泛应用和推广。
猜你喜欢
大电机技术(2022年5期)2022-11-17
北京测绘(2021年1期)2021-02-05
中国交通信息化(2020年12期)2020-02-06
成都信息工程大学学报(2019年1期)2019-05-20
四川环境(2019年6期)2019-03-04
家庭影院技术(2018年11期)2019-01-21
中国环境监察(2016年8期)2016-10-23
水电站机电技术(2014年4期)2014-10-13
河南科技(2014年22期)2014-02-27
化学分析计量(2013年3期)2013-03-11