
基于自动驱动控制的EPS性能教学测试系统的研究与设计①
2018-08-03 05:18,,
佳木斯大学学报(自然科学版) 2018年4期
, ,
(1.安徽国防科技职业学院汽车技术学院,安徽六安 237011;2.合肥工业大学汽车与交通工程学院,安徽合肥 230009;3.安徽星瑞齿轮传动有限公司,安徽六安 237011)
0 引 言
在电动汽车技术实践应用领域,目前电动助力转向系统EPS在汽车低速运行时转向轻便性不强和高速行驶时道路感差及助力特性出厂性能单一导致其不能适应不同的驾驶员驾驶习惯,为实现其理论教学和实践教学的目的,提出了一种基于自动驱动控制的EPS性能教学测试系统。对于该项技术的研究目前一些杂志和期刊的研究还处于研究和实验室样机阶段,离产品需求还有很大差距[1]。另外,这些研究并没有解决电动助力特性曲线适应不同驾驶员的驾驶习惯,而在实际驾驶过程中,不同的驾驶员驾驶习惯是不同的,所以对低速行驶时的转向轻便性和高速行驶时路感是不一致的,从而给出了一种基于自动驱动控制的EPS性能教学测试系统设计。
1 系统的架构
基于自动驱动控制的EPS性能教学测试系统,该教学测试系统包括汽车电动助力转向系统,数据采集系统,替代人手的方向盘力学测控系统。电动助力转向系统有机械部分和电子部分。其机械部分结构主要包括转向器、步进电机及离合器、减速机构、转向器、转向盘等部件,电子控制部分主要包括转向盘转矩传感器、车速传感器、汽车发动机转速传感器,ECU等元器件[2]。通过模拟人手的方向盘测控系统确定方向盘转速和角度,并实时回传打方向盘的扭矩[3]。系统装置直流无刷电机使用TI公司的DSP28335作为控制芯片,控制直流无刷电机运行,采用交流伺服电机机构替代人手模拟方向盘转动,直接测量助力ECU的输出电流来获取助力电机转矩。实现了EPS系统的控制基本算法:助力控制、回正控制和阻尼控制,并且设置了一种基于模糊神经网络控制算法的助力特性曲线。系统采用Labview编程开发上位机软件,可以快速且精确的测量助力特性曲线。系统的架构框图如图1所示,机械部分的结构图如图2所示。
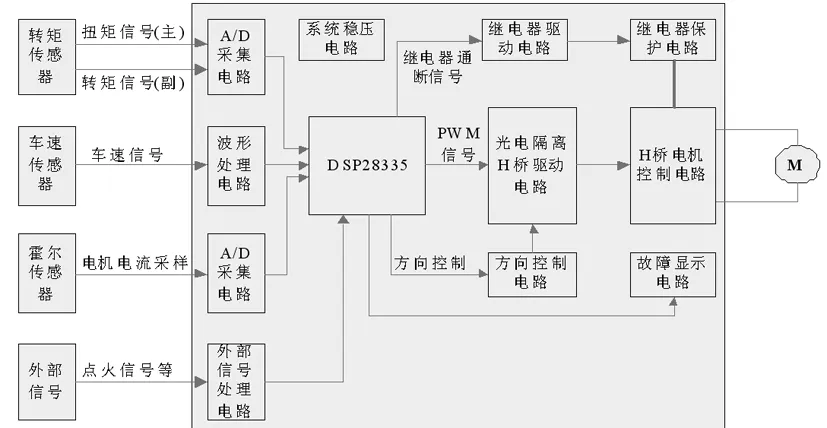
图1 于自动驱动控制的EPS教学性能测试系统总体架构框图
2 系统软件的设计
助力转向系统主要有传统液压助力转向系统HPS、电控液压助力转向系统EHPS和电动助力转向系统EPS三大类型,这三种不同形式是助力转向系统发展的阶段,传统的机械式转向系统已经淘汰渐渐成为历史。
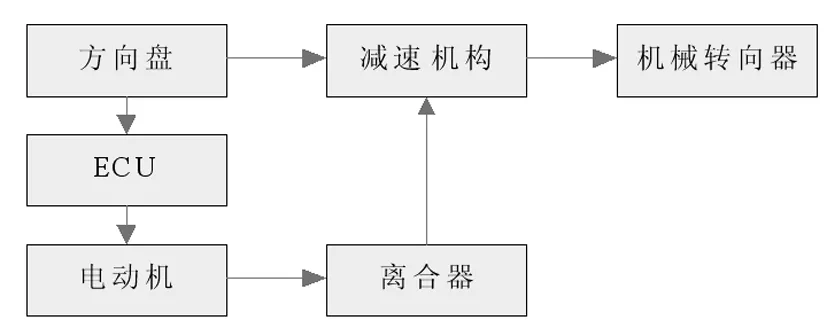
图2 系统机械部分结构图
EPS因为不再采用液压执行机构,也就从根本上解决了HPS和EHPS的固有缺陷,是一种直接采用电机来提供转向力矩的动力系统。电机驱动发出的转矩经由传递机构协助驾驶员人手进行动力转向。车速和方向盘扭矩传送给系统ECU,所以可根据控制策略实现最优调节EPS助力大小,也就是通过软件程序编译来不断优化提升助力转向系统性能。EPS作为一个可以同时执行多任务系统[4],为了保证这些任务均能可靠执行,我们在软件设计时优先选用了中断的方式,这样可以很大程度上节约大量的CPU资源,如把信号输入与指令输出控制等工作就交由其他模块来完成,CPU功能主要是完成大量数据的内部运算和高速分析工作,基于这种理念,不仅提高了EPS系统工作效率,而且有效地提升系统快速反应的能力。系统工作机理如图3所示。首先,系统上电工作前自检,同时EPS报警指示灯亮起,一旦自检完成后报警指示灯会自动熄灭,表示EPS系统是正常的(否则表示可能出现故障,可由专用故障诊断接口读取),当电动机的电磁继电器通电后,系统进入正常工作,此时如果驾驶员操纵转向盘旋转,扭矩传感器采集到信号就被传输给电控单元ECU,唤醒中断启动, ECU同时需要采集车速进行计算分析处理,输出与此扭矩和车速信号相匹配的控制电机的PWM输出信号、转动方向控制信号和电磁离合器控制信号。与此同时对电动机的电流进行全程无间断即时监测,以保证电机的安全可靠运行。在系统工作状态中,EPS安全监测单元将对整个EPS系统采取不间断在线监测,以实现系统的稳定长效工作,例如:在连续25秒内,电机电流一旦出现大于所允许限值范围就使它电流减小,若依然无法将目标电机电流控制在安全允许限值内,直至将切断电磁继电器、电磁离合器的电源,并且将故障码存储入ECU,仪表板上EPS报警灯会同时点亮,提醒驾驶员系统故障。
3 模糊神经网络算法在软件具体实施中的应用
模糊神经网络控制器结合模糊控制和神经网络两者的优势,利用神经网络去高速并行地实现模糊推理,从而得到更为准确的规则和更强的自学习、自适应能力[5-6]。
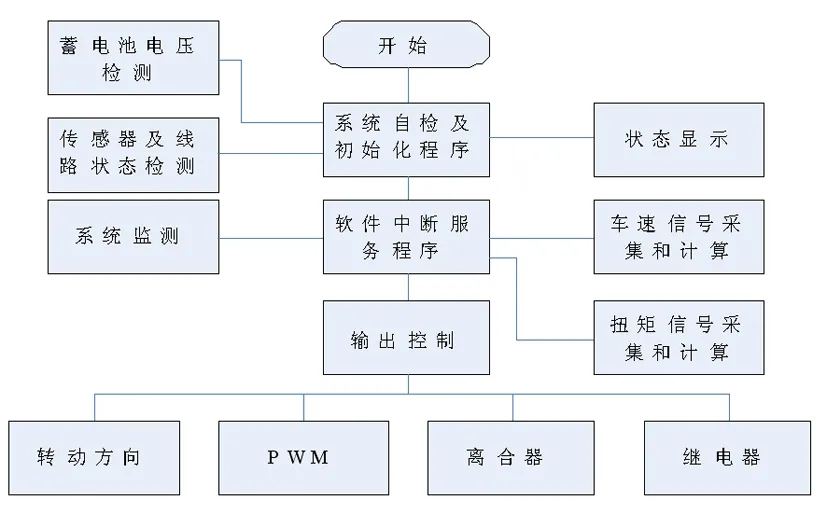
图3 软件系统控制原理图
此模糊神经网络控制器分为5层,第1层:是输入层,各个节点信号输入直接传递下一层。第2层:隶属度函数生成层,又叫模糊化层,该层各个节点计算一个隶属度函数[7]。第3层:是规则层。
模糊推理规则为Mamdani型,设置EPS系统目标控制电流与方向盘力矩和车速之间的调整关系:当转动方向盘力矩大且车速低时,目标控制电流就升高;当转动方向盘力矩小且车速高时,目标控制电流就降低。具体规则表达式是:
If x is A and y is B then z is C
其中,Ai、Bj对应为x和y的模糊子集;模糊量为:C;输入变量分别为:x,y。输入量与输出量分别对应了7个语言变量等级,即:{PB,PM,PS,ZE,NE,NM,NB}。它们三者的论域一样均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。综上对数据分析,得到如表1所示模糊控制规则表:
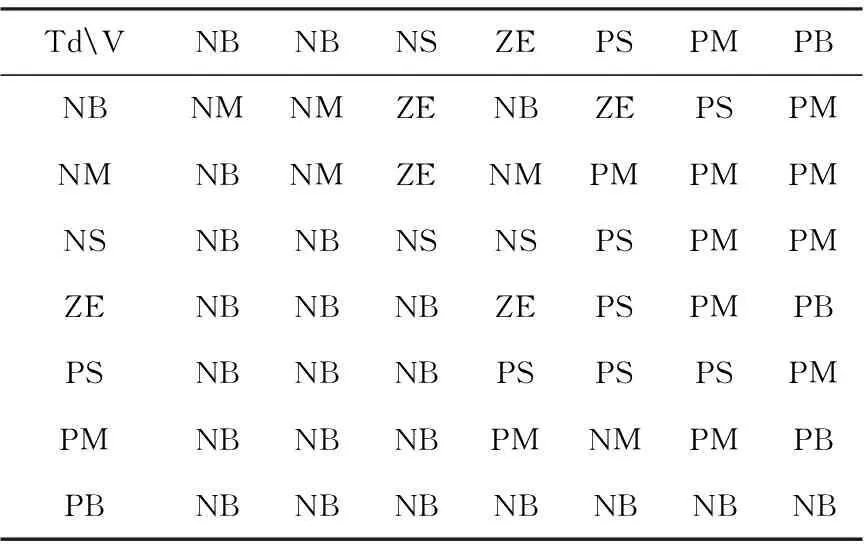
表1 模糊控制规则
至此已建立电机电流的模糊控制模型,但为了便于模糊神经网络识破和为其提供训练样本,故采用模糊推理强度转移法求取模糊控制表[8]。模糊控制表如表2所示。
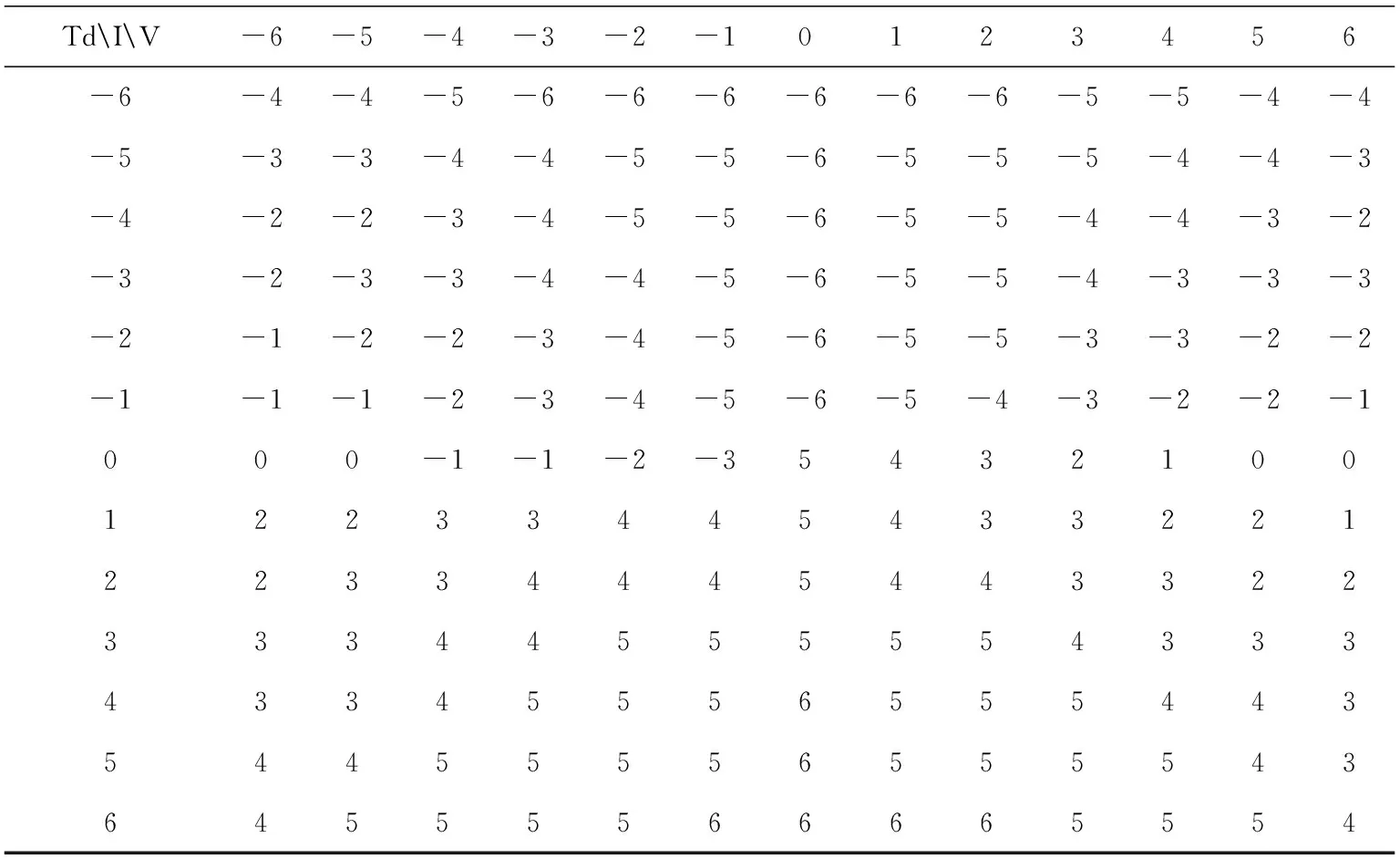
表2 模糊控制表
第4层为逆模糊化层,它主要是实现反模糊化的功能,反模糊化的实质就是将语言表达的模糊量回复到精确数字[9]。第5层为输出层,对模糊神经网络进行必要的训练自学习,采用反向传播算法调整隶属度函数自适应性达到最佳,直到符合所需的调整准则。
编制具体软件程序必须满足EPS系统功能的需求,实现系统可靠控制的算法目前主要有助力控制、回正控制和阻尼控制三种。软件编写时,充分考虑采样和各部分功能的模块化设计。同时通过CAN总线,将助力效果对比在编制的Labview程序中显示出来。实施中模糊神经网络算法控制BLDC框图如图4所示。

图4 模糊神经网络算法控制BLDC框图
4 结 语
就目前EPS在车辆低速运行时转向轻便性不强和高速运行时路感差以及助力特性出厂单一性导致其不能适应不同的驾驶员驾驶习惯,为实现其理论教学和实践教学的目的而提出的一种基于自动驱动控制的EPS性能教学测试系统。我们采取保留原车方向盘,在其方向盘后部安装外置同步轮式的传动机构和伺服电机的方式来实现人手打方向盘的效果。此外置伺服电机系统能够较好地代替人手打方向盘,通过数据采集系统监测外置伺服电机的扭矩变化得出车速、方向盘转角、方向盘转矩、助力转矩等大量数据,得出输入和输出的定量关系,达到实时观察显示 EPS 电机助力大小的目的。此系统不仅避免了人手操作的不稳定性,还保证了教学实训操作的可控性。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
今日农业(2020年16期)2020-12-14
电子制作(2019年16期)2019-09-27
儿童故事画报(2019年5期)2019-05-26
传媒评论(2017年8期)2017-11-08
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车零部件(2014年5期)2014-11-11
清风(2014年10期)2014-09-08
环球时报(2014-01-06)2014-01-06
