一种智能步兵雷通讯系统的路由优化算法
2018-08-01 03:04华宇宁傅国强郝永平
沈阳理工大学学报 2018年3期
华宇宁,傅国强,郝永平,白 帆,俞 洋
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
智能地雷是一个全新的概念[1],这个概念的产生可以追溯到上个世纪末期,智能地雷大胆的采用声、光、磁、红外线等新技术感知和识别目标,并主动摧毁目标,彻底改变传统地雷静止不动、被动防御的作战模式,彻底消除传统地雷铺设后不可控,误伤率高,战后难于排除的弊端。智能步兵雷顺应物联网时代的潮流,在智能地雷上安装网络模块,地雷之间可以进行数据传输,步兵和地雷之间可以进行信息交互,甚至智能步兵雷可以被远程控制。
在自组网的路由协议中,AODV路由协议[2]因其综合DSDV和DSR路由协议[3]的优点,具有路由维护少、反应速度快、频带利用率高等特点,在军事上得到广泛应用[4],但是AODV协议也存在一些缺陷,如连接链路不稳定,数据传输过程中频繁的链路断裂[5],会降低数据传输速率,增加数据包传输时延及数据包丢失风险,导致通讯系统性能低下。本文引入GPS模块对连接链路进行筛选,将筛选出来的稳定连接链路的路由表项写入AODV协议的路由表中,提高连接链路的稳定性。
1 智能步兵雷硬件电路构成
硬件平台为S3C2416控制器,配置GPS定位接收机;软件平台为Linux2.6.21;虚拟机为Ubuntu10.04,配置水星MW300UM无线网卡;自组网路由协议为aodv-uu-0.9.6。
每个智能步兵雷都拥有独立的S3C2416核心电路:智能步兵雷系统微控模块使用三星公司生产的S3C2416 ARM926,其工作主频为400MHz,运行内存选用三星的K4T51163 DDRII266 64MByte RAM内存储,程序存储选用三星公司生产的256M的NAND FLASH,并且支持使用扩展存储设备TF卡和SD卡。
各个智能地雷通过WIFI通讯模块进行数据传输。CPU集成4线电阻式触摸屏接口,可以接4线电阻触摸屏,实现友好的图形界面,使步兵和步兵雷之间可更易进行信息交互。
2 AODV协议
智能步兵雷所使用的无线多跳Ad Hoc网络[6-7]的AODV路由协议,是一种按需路由协议,其采用路由发现和路由维护的基本请求式机制,在有路由需求时才会去发现路由,在路由存在时进行路由维护。
2.1 路由发现
AODV协议的路由发现过程如图1所示,L1为源节点A到中继节点B的距离,L2为中继节点B到目的节点C的距离,L3为源节点A到目的节点C的距离,ΔL为理想通讯距离。
源节点A需要向目的节点C发送数据时,即有路由需求,A节点会首先在自己的路由表中查找是否存在到达目的节点C的有效路由,如果A节点中有到达目的节点C的活动路由,则A节点和C节点就可以直接进行数据传输;如果A节点中没有到达目的节点C的活动路由,源节点A启动路由发现过程:源节点A会向其邻居节点B广播路由请求分组RREQ[8-9]消息,邻居节点B收到RREQ消息后首先建立或更新逆向路由,然后再把收到的RREQ消息广播给下游节点,如果恰好这些下游节点中有目的节点C,则目的节点C就会收到RREQ消息,接着节点C将会沿着反向路由向源节点A回传路由应答RREP报文,建立前向路由,当源节点A收到RREP报文时,从源节点A到目的节点C的路由既建立起来。
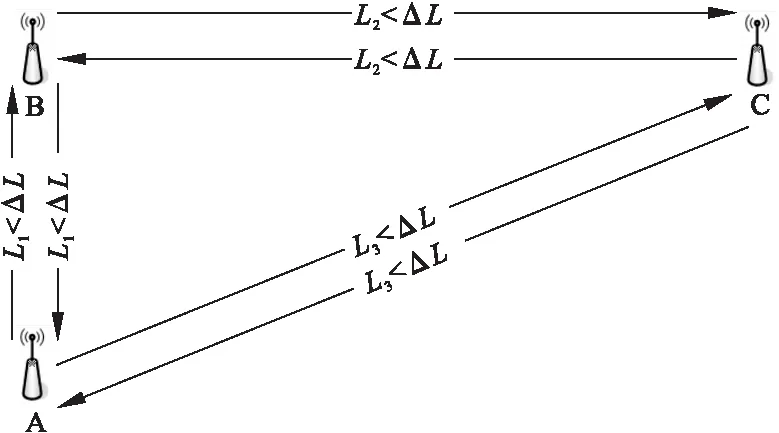
图1 实际布网测试的网络拓扑
2.2 路由维护
路由建立后,各节点为维护已经建立的路由,每个节点周期地向自己的邻居节点广播发送HELLO消息,作为与相邻节点的相互连接信息。HELLO消息的生存时间TTL值被设置为1,保证该消息传播范围仅限于发送节点和相邻节点之间,收到HELLO消息的节点将建立或更新一条致发送节点的路由。于此同时,在AODV协议中,任何节点收到任何控制报文,也具有和收到显示性HELLO消息一样的意义。因为其可以通过控制消息报文中的源IP地址,显示出到达源节点的有效连接性。如果一条路由在其过期时间内没有被使用或节点确定有效路由的下一跳无法到达时,则该路由无效。当节点检测到某一路由无效时,其在路由表中将该路由表项设置为无效,且再经过一段时间后才将其删除。
AODV协议是一种按需路由协议,各节点只有存在需要发送或转发的数据时才会检查自己的路由表,查看是否有通往目的节点的路由,如果找到了通往目的节点的路由,即完成数据发送过程;如果没有找到目的节点的路由表项或路由表项已经过期,则向目的节点发送RREQ消息,重新执行路由发现过程。AODV路由协议在路由发现过程中为避免环路[10],会选择跳数最少的通讯链路,所以AODV路由协议选择路径机制不够合理:目的节点利用这样的路由建立机制很可能会建立一条通讯距离过长,并且很快就会发生链路断裂的路径,这会造成通往目的节点的路径频繁失效,路径失效则会造成传输不完整的数据被当即放弃。频繁的路由修复[11]过程中,重新寻找新路由需要消耗额外的时间和资源,增加网络负担,降低网络有效利用率和数据传输效率,降低通讯系统的稳定性和实时性,增加数据包丢失风险,降低分组投递率,影响数据完整性。
3 路由算法优化
根据智能步兵雷在铺设后不会被轻易移动的特点,为了得到稳定路由路径,在控制电路中加入GPS模块和一个路由优化软件,这个路由优化软件以GPS模块得到的地理位置信息为依据进行地理位置匹配并执行路由优化算法。路由优化算法借鉴基于蚁群算法的路由优化思想[12],根据布网情况选择一跳的最佳通讯距离,算法会舍弃像A节点与C节点之间通讯距离过长且通讯不稳定的路由表项,保留通讯距离短且通讯稳定的路由表项填入AODV协议的路由表中。
优化AODV路由协议的流程如图2所示。

图2 路由优化算法的流程图
节点的S3C2416核心电路中的路由优化软件运行后,在网络中首先共享各节点的GPS定位信息;路由优化软件通过对邻居节点经纬度信息分析得知:到达邻居节点的通讯距离是否过长,如果本节点到达邻居节点的通讯距离超出了理想通讯范围ΔL,有链路断裂危险;同时节点之间又存在可用的中继节点,路由优化软件会调用脚本,主动屏蔽来自超出了理想通讯范围ΔL的邻居节点的信息,其实质是过滤掉该邻居节点发来的数据包。因此不稳定的通讯链路将会被斩断,使两节点不能直接通信,从此两个节点的数据传输只能依靠中继节点的转发。这样的路由优化软件会使AODV路由协议中新形成的路由表中不存在通信距离超出理想通讯距离ΔL的路由表项。
4 布网测试的实验结果与分析
实验环境如图1所示,使用三个通讯节点布网测试进行多跳实验:源节点A的IP地址是192.168.1.1,中继节点B的IP地址是192.168.1.9,目的节点C的IP地址是192.168.1.5。
为得到优化前后基于AODV路由协议的Ad Hoc网络数据传输性能差异,采集七组对比数据证明:在路由优化算法投入后,通讯系统性能得到优化。
实验一 通讯系统链路稳定性对比实验
路由优化算法投入前后,通讯系统链路稳定性对比结果如图3所示。
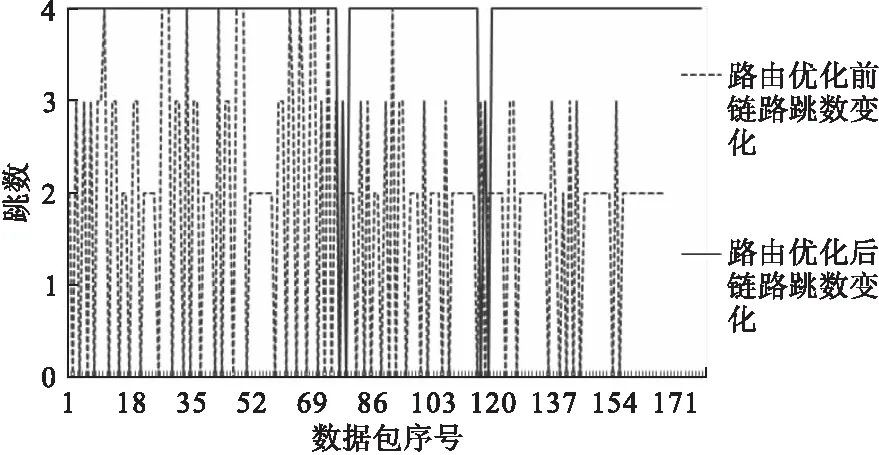
图3 算法优化前后链路稳定性对比
基于AODV路由协议的Ad Hoc网络在经路由优化算法优化后,通讯系统链路断裂次数明显减少,链路更加稳定;网络中,链路跳数保持在较高数值,参与数据传输的通讯节点数量明显增加,通讯节点利用率明显提高。这主要是因为路由优化算法选择了更稳定的链路,增加进行数据传输的中继节点,所以降低了数据传输过程中链路断裂风险。
实验二 通讯系统吞吐量对比试验
对比吞吐量是跟踪一个时间段内一对节点之间数据流量,并进行统计得出的。将每一个时间段内的输入输出速率对比,那么某一时间段的吞吐量就可以这样计算:某时间段的网络吞吐量为该时间段传输数据包字节数与该段时间长度之比。
将一秒钟时间内传递的数据包字节数的总和,除以一秒钟时间的长度,就可以得到该一秒钟时间段的平均吞吐量,即瞬时输入输出速率;将一段时间内传递数据包字节的总数和,除以这段时间的长度,就可以得到该时间段的平均吞吐量,即平均输入输出速率。
(1)路由优化算法投入前后,通讯系统瞬时输入速率对比结果如图4所示。
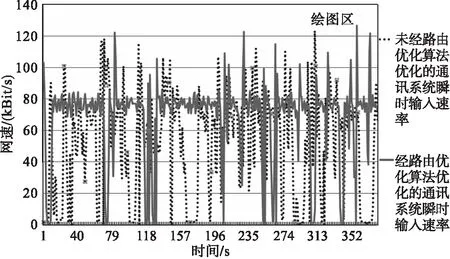
图4 算法优化前后瞬时输入速率对比
基于AODV路由协议的Ad Hoc网络在经路由优化算法的优化后,通讯系统瞬时输入速率曲线波动减小,整条曲线位置得到提高,主要由于通讯系统连接链路更稳定,增加了通讯系统稳定性,提高了网络数据传输效率。
(2)路由优化算法投入前后,通讯系统平均输入速率对比结果如图5所示。
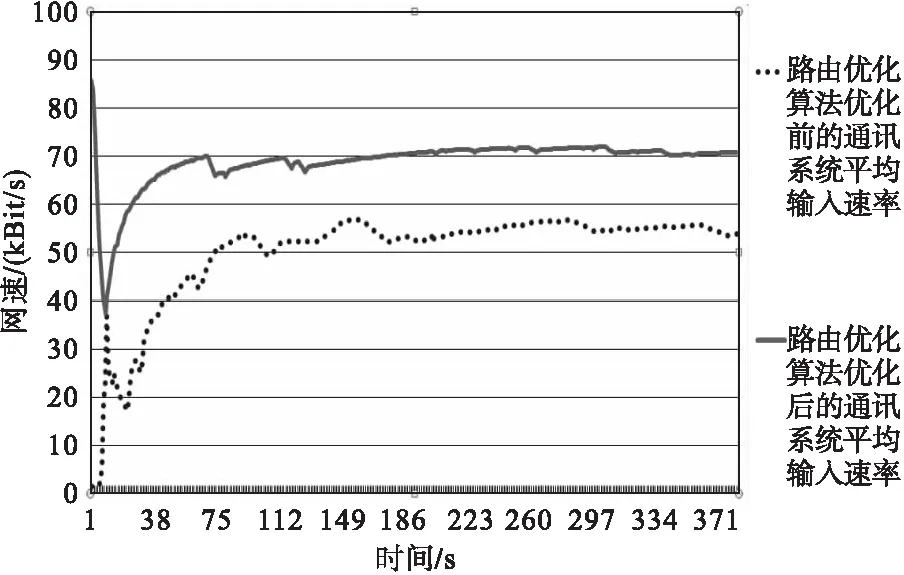
图5 算法优化前后平均输入速率对比
基于AODV路由协议的Ad Hoc网络在经路由优化算法优化后,平均输入速率变化曲线波动减少,并且平均输入速率整体曲线都保持在较高数值,主要由于路由优化算法使通讯系统连接链路更加稳定,从而使得该通讯系统输入数据的平均速率变得更加稳定和高效。
(3)路由优化算法投入前后,通讯系统瞬时输出速率对比结果如图6所示。
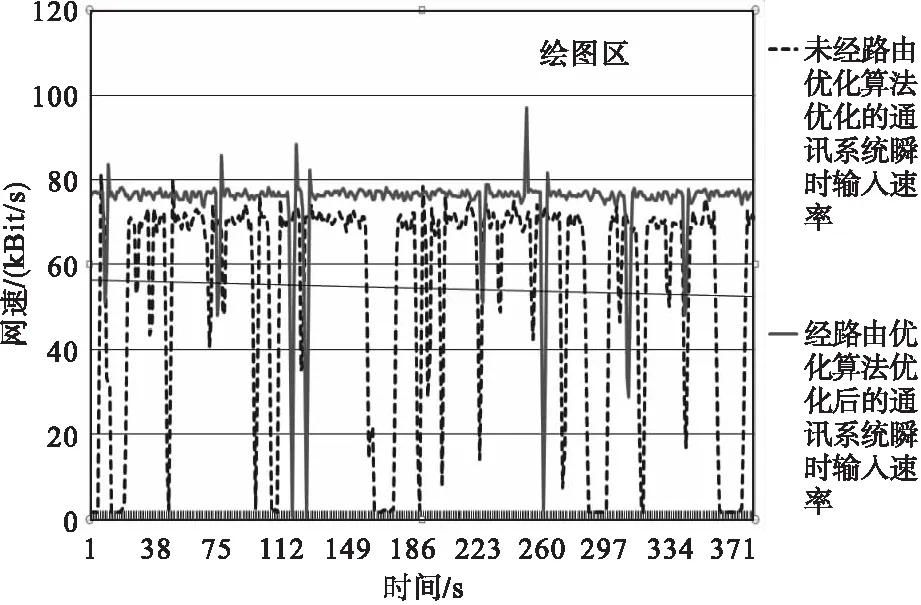
图6 算法优化前后瞬时输出速率对比
基于AODV路由协议的Ad Hoc网络在经路由优化算法优化后,通讯系统瞬时输出速率曲线波动减小,瞬时输出速率整体曲线得到有效提升。主要由于路由优化算法使通讯系统连接链路更加稳定,导致通讯系统瞬时输出速率更加稳定和高效。
(4)路由优化算法投入前后,通讯系统平均输出速率对比如7所示。
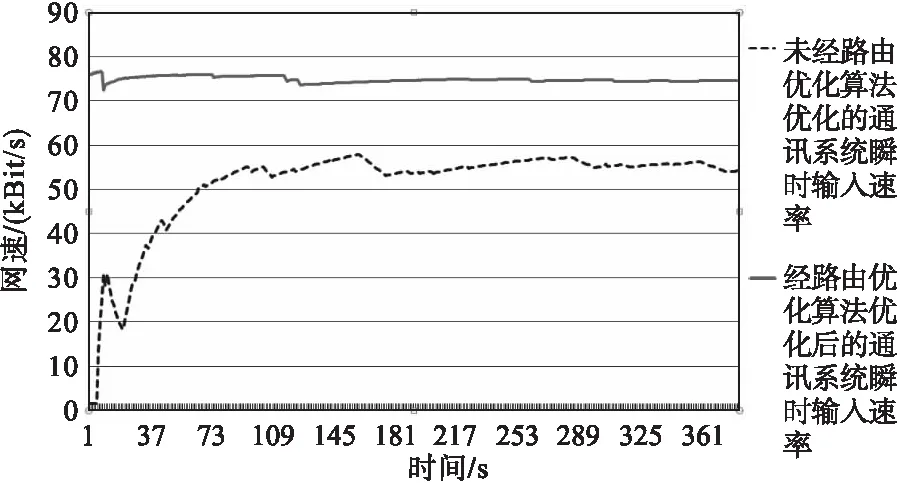
图7 算法优化前后平均输出速率对比
基于AODV路由协议的Ad Hoc网络在经路由优化算法优化后,通讯系统数据平均输出速率曲线波动减小,且整体曲线都保持在一个较高数值。主要因为路由优化算法使通讯系统连接链路更稳定,路由优化算法使通讯系统平均输出速率更加稳定和高效。
经过上述四组数据对比证明:路由优化算法通过增加中继节点,使通讯系统的链路稳定,提高通讯系统吞吐量。
实验三 端到端时延对比实验
路由优化算法投入前后,通讯系统端到端时延对比信息如图8所示。

图8 算法优化前后端到端时延对比
基于AODV路由协议的Ad Hoc网络在经路由优化算法优化后,端到端时延曲线整体保持在较低水平,且曲线波动减小。主要因为路由优化算法通过选择稳定路由表项,降低数据传输过程中链路断裂风险,节省频繁路由寻找时间,提升网络有效利用率,降低了数据包传输时延,最终使通讯系统端到端时延稳定降低,系统实时性能得到有效提高。
实验四:分组投递率对比试验
路由优化算法投入前后,通讯系统分组投递率对比信息如图9所示。
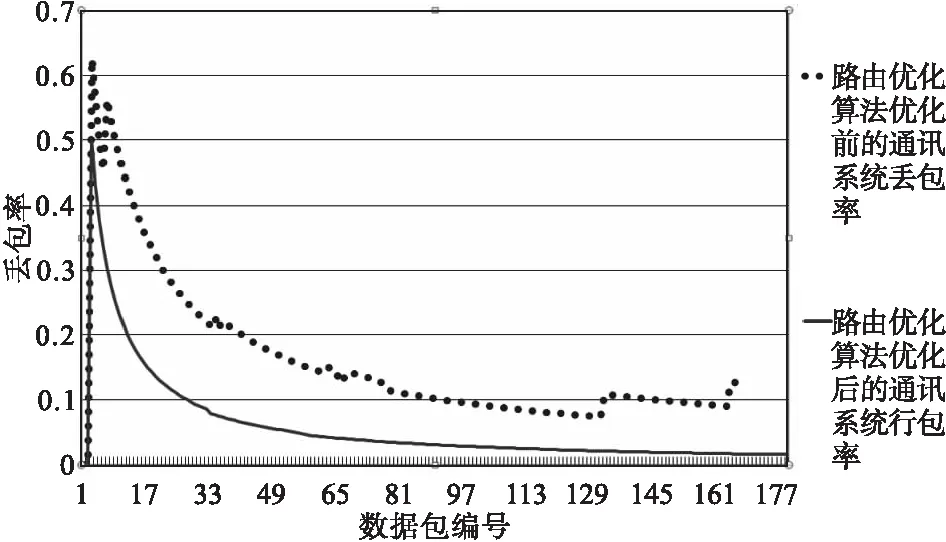
图9 算法优化前后丢包率对比
路由优化算法优化后,基于AODV路由协议的Ad Hoc网络丢包率曲线整体降低,数据传输正确性和完整性得到提高。主要因为路由优化算法投入使网络中通讯链路更加稳定,降低了通讯过程中链路断裂风险,节省路由修复时间,同时降低节点缓冲区占用,降低因缓冲区溢出造成数据包丢失风险,从而提升通讯系统分组投递率。
5 结论
基于AODV路由协议的Ad Hoc网络在引用路由优化算法优化后的优势在于:舍弃不稳定路由表项,降低数据传输过程中链路断裂风险,通过筛选稳定路由表项,加入中继节点,完成数据转发任务,改善网络性能。布网测试的结果显示:
(1)一跳通讯距离被缩短,降低通讯过程中链路断裂风险,有效解决了AODV路由协议因按需路由造成链路频繁断裂缺陷,使通讯链路相对稳定。
(2)在通讯距离短且通讯链路稳定情况下,通讯系统吞吐量整体提高,端到端时延明显降低,分组投递率得到提升。
(3)通讯系统数据传输速度可以保持在70kbit/s以上,提高了智能步兵雷的通讯稳定性、实时性和可靠性以及所传送数据的正确性和完整性。
(4)基本可以满足智能步兵雷之间进行数据传输和协同作战的需要。
猜你喜欢
移动通信(2021年5期)2021-10-25
空间科学学报(2020年3期)2020-07-24
湖北第二师范学院学报(2020年2期)2020-06-05
铁道通信信号(2020年9期)2020-02-06
魅力中国(2019年37期)2019-10-21
太原学院学报(自然科学版)(2019年3期)2019-09-23
太原科技大学学报(2019年3期)2019-08-05
科技与创新(2018年1期)2018-12-23
中国交通信息化(2014年3期)2014-06-05
自动化与仪表(2014年10期)2014-02-26