一种浅海环境垂直剖面监测系统研制∗
2018-08-01 12:37:04范业明
舰船电子工程 2018年7期
范业明
(大连测控技术研究所 大连 116013)
1 引言
在海洋环境监测、海洋生产、水产养殖领域里,经常需要对特定领域的海水参数进行长期、定点、实时的垂直剖面监测。然而,现有海洋环境监测平台主要是在特定海域内通过链式传感器浮标的方法获取水下环境垂直剖面的监测数据,该种方式虽然能够准确监测到同一垂直剖面不同深度的水质数据,但是需要将多个传感器工作在不同深度的监测点才能得到更加全面的水下环境数据,这样势必造成整个水下环境监测系统成本增高。而本次设计通过采用升降式控制方法,只需要单传感器就可以实现同一垂直剖面的不同深度的精确测量,很大程度上降低了水下垂直剖面不同深度的长期连续监测系统成本,为我国进一步开发海洋资源、保护海洋生态环境以及减灾防灾工作提供实时可靠的、性价比较高的水下环境监测系统[1~3]。
2 系统总体设计
如图1所示,升降式环境垂直剖面监测系统控制防水电机通过齿轮转动相互咬合带动连接传感器线缆的缠绕,实现整个传感器的升降过程。在整个系统工作过程中,相比传统的链式环境监测方式,单传感器的升降式环境监测系统替代了传统的悬挂多传感器的链式监测方式,在很大程度上减轻了系统的重量、简化了系统的设计结构、降低了系统功耗。另外,由于对整个系统的结构复杂度进行了简化,所以整个系统在布放、回收方面,相比传统的由多传感器组组成的庞大环境监测系统,它的布放方式具有很大的可操作性,降低了海上系统施工的难度[4]。
基于升降式设计思想,本次系统设计主要重心是电机传动控制,保证整个系统能够升降式工作,完成不同深度水下环境数据采集和传递,实现长期、稳定的升降式水下环境垂直剖面监测系统[5]。
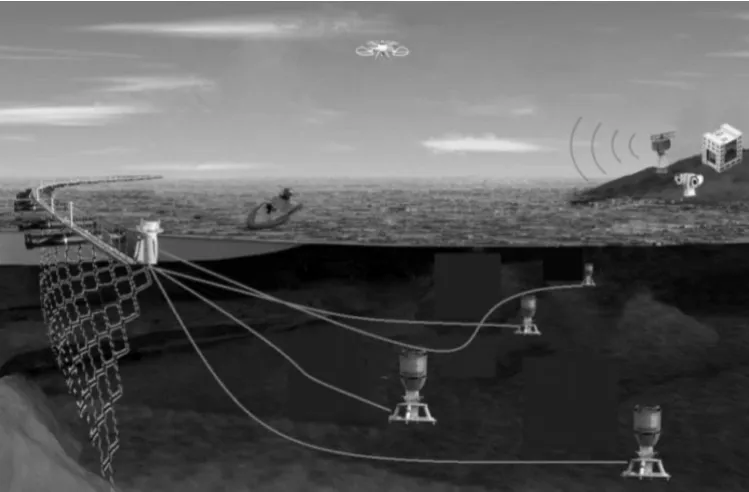
图1 系统示意图
3 系统硬件设计
如图2所示,整个环境监测系统主要由环境监测传感器组、绕线盘、水下电子舱、锚定装置、水下信息采集装置、水面浮球组成。环境监测传感器组放置在水下浮球内部。用于完成温深盐物理量的采集,锚定装置和绕线盘用于固定系统和实现水下浮球的升降功功能。而水下电子舱主要作用是控制绕线盘的转动,实现实际需要的转动圈数、速度控制操作[6]。
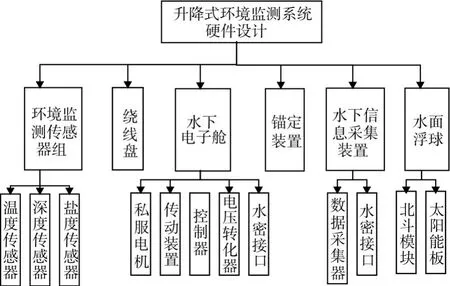
图2 系统硬件结构图
如图3所示,浅海垂直剖面环境监测系统主要由水下浮球、水下电子舱、缠线盘、锚定装置组成,其中水下电子舱内主要有私服电机、电机控制器、电压转化器、水密接口等模块。水下电子舱放置在缠线盘的内部,水下浮球、缠线盘之间通过铠装电缆连接(铠装电缆能够保证线缆的抗拉性),铠装电缆一端通过水密连接器连接水下浮球内部的波浪仪、温度传感器、盐度传感器,为其提供工作电压和监测数据传输功能。铠装电缆另外一端则缠绕在缠线盘上,铠装电缆接头通过水下连接器和来自水下信息采集装置的水下电缆连接,并通过该电缆将采集的水下环境数据发送到水下信息采集装置,并通过北斗模块返回到岸站系统进行数据处理,而来自水下信息采集装置的水下电缆除了为水下传感器提供电能,它的分支接头也通过水下连接器接入到水下电子舱内部,为水下电子舱内的电机、电机控制器提供工作电压[7]。
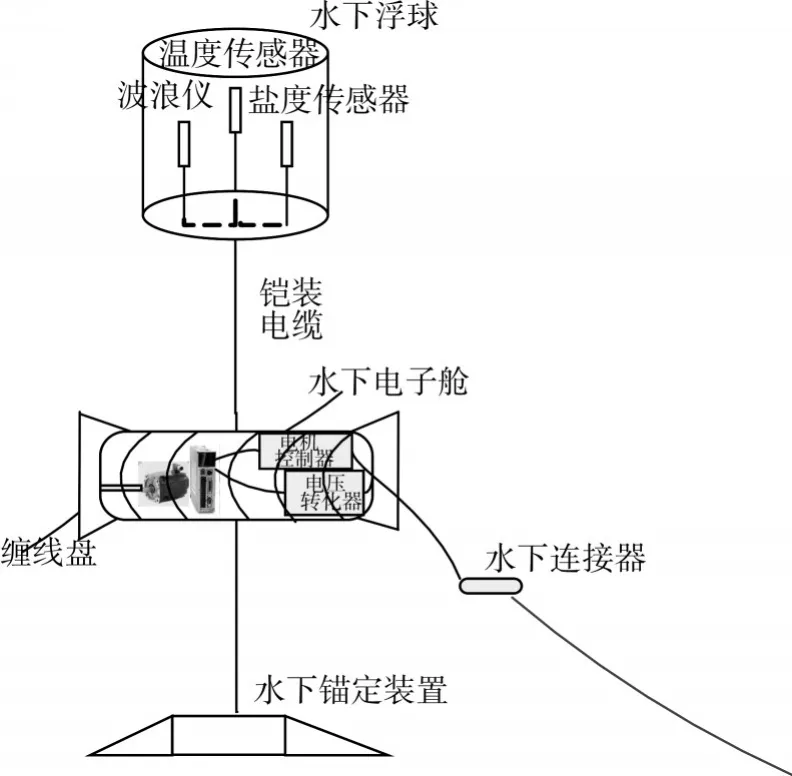
图3 升降式系统结构设计图
在系统工作过程中,由于水下电子舱内部的伺服电机定子与传动装置是固定连接的,而缠线盘依托齿轮咬合能够被私服电机定子的旋转带动起来,所以整个升降式控制系统便可以通过电机旋转实现缠线盘正反方向的定速缠绕。由于缠线盘通过钢缆与水下锚定装置是固定连接的,且处于正浮力状态,缠线盘始终是处于稳定平衡状态。当缠线盘匀速缠绕线缆时,缠线盘与水下浮球的线缆长度发生变化,从而实现单组传感器在同一垂直剖面的不同深度海水环境监测[8]。
由于本次设计的垂直剖面环境监测系统采用单一传感器组通过升降式控制方式进行水下环境测量,替代了传统的多组传感器固定链式测量方式,这样整个系统只需要给每套水下测量装置的单套传感器进行供电即可,避免了传统的多传感器组供电的方式。所以本次升降式水下环境监测系统所需功耗要比链式水下监测系统小很多。而实际应用中,私服电机控制缠线盘转动并不是频繁操作,所以不会造成系统整体功耗负担。基于此,本次系统采用太阳能板加蓄电池供电方式,并通过北斗卫星,将水下环境信息数据传输到岸站数据中心进行后期处理。该种系统供电和通信方式替代了传统的水下电缆供电和传输数据方式,不仅节省了供电和传输电缆的成本、而且还避免水下电缆长期磨所需要的维修成本,保证数据传输的安全性和稳定性。
4 系统软件设计
由于整个浅海环境垂直剖面监测系统是由多个水下测试单元组成,当多个监测系统同时向水下信息采集装置发送数据时,势必造成数据采集装置不能有序的接收到每套环境监测系统所传送的水下环境数据,造成数据丢失或者错误。所以本次系统在进行数据传输时,采用了CAN总线的控制方式,通过数据采集单元的协议规定进行数据仲裁,保证每个时间段,只能有一套系统使用通道进行环境数据发送。基于CAN技术的使用,在保证数据传输的稳定性和可靠性前提下,整个系统软件设计的重心就是通过控制电机的转动,完成缠线盘的精确缠线操作[9~11],具体系统软件流程图如图4所示。

图4 系统软件设计图
升降式控制系统上电初始化后,电机控制器对私服电机写入工作模式,等待上位机的指令。接收到上位机指令后判别指令的具体内容,如果是速度指令,在判别电机转速、方向后,写入相应命令字,在写入0F,则电机开始工作。如果接收到指令是0x1111或者是0x0000,则分别代表了电机抱闸和电机停止抱闸后继续工作的意思。如果电机控制为接收到上位机的指令,则向上位机发送电机的工作状态信息。
5 验证
如图5所示,在实验室通过系统控制应用软件向水下环境监测系统发送控制命令。具体设置参数包括电机转动方向、电机转速。当电机控制指令发出后,发现缠线盘实际运行方向、缠线盘转速与升降式控制软件预输入参数一致,说明升降式控制系统工作性能的稳定性和精确性。

图5 系统演示软件界面
基于上述实验室验证实验,将系统布放于水深约30m的海洋中,在锚定装置沉入水底后,初始值我们设定锚定装置离缠线盘大约5m,而水下浮球离缠线盘大约20m,即25m的水深。系统通电开始工作并开始水下环境数据采集。数据采集约100s后,开始转动缠线盘处于缠线状态,此时通过定深实时监测当置水下5m处,停止缠线盘转动并进入水下环境数据采集状态,工作约100s后,系统开始控制缠线盘放线置水下20m处,并将系统长期进行水下环境监测状态中。如图6所示,整个测试结果说明,系统升降跟踪能力达到了较高的精度,平均升降跟踪误差小于1 m。
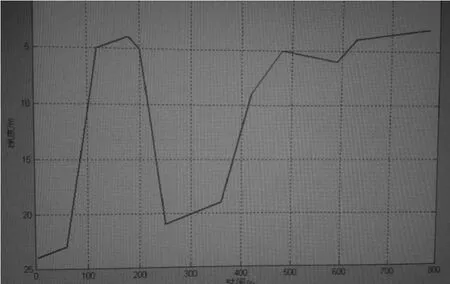
图6 系统深度变化数据分析图
6 结语
本文通过升降式控制设计完成了一种浅海环境升降式监测系统。系统设计预留一组传感器接线,可为后期系统功能升级、改进提供接口[12]。另外,在系统进行海水环境监测过程中,由于系统受到海水浮力作用,为保证系统稳定工作,配备了锚定装置悬挂在升降式系统下方,保证升降式系统工作在正浮力状态下,减轻了升降式系统中私服电机的负载重量,节省电量。总之,本次升降式系统设计能够满足定点垂直剖面水下环境数据的实时采集和传输要求,达到了预期的目标。
猜你喜欢
佛山陶瓷(2022年8期)2022-11-23 20:33:39
科技尚品(2021年7期)2021-09-12 14:51:22
——工程地质勘察中,一种做交叉剖面的新方法
中国设备工程(2021年2期)2021-01-28 07:51:10
探索科学(学术版)(2020年7期)2021-01-13 03:39:26
卷宗(2020年6期)2020-04-23 09:37:59
科技视界(2019年26期)2019-11-26 08:52:23
通信产业报(2018年21期)2018-08-20 10:25:54
电子测试(2017年12期)2017-12-18 06:35:46
长江科学院院报(2017年5期)2017-05-18 08:20:41
北京航空航天大学学报(2016年6期)2016-11-16 01:50:44