
面向纳米压印的大行程二维精密定位平台的设计
2018-07-31 08:42汪文峰刘志龙曾佑轩李丰甜
自动化与仪表 2018年7期
汪文峰,马 立,刘志龙,曾佑轩,李丰甜
(上海大学 机电工程与自动化学院,上海 200072)
纳米技术是在0.1 nm~100 nm尺度内研究微粒的运动规律和特性,并在此基础上构建材料、设备和系统的一项崭新技术。当前为实现纳米压印技术真正意义上的产业化应用,必须解决一个实际性问题:即在大面积晶圆上实现重复性好、质量高的压印[4]。目前,大面积纳米压印技术主要通过3种方式实现:全面积压印、步进式压印[5]、滚动式压印[6]。
在大面积纳米压印技术应用中,为满足高效的生产要求,压印设备在同时满足大行程或超大行程的特性与高速性之间存在矛盾。并且,高速条件下电气系统、机械系统等的惯性等固有特征极大地增加了高精度定位实现的难度,同时大行程或超大行程范围内机械系统的平面度、平行度等系统寄生误差必然会使纳米级定位精度的实现变得更加困难[7]。美国Molecular Imprints公司的Imprio 450 CMOS纳米压印光刻系统代表了下一代纳米压印光刻技术的水平,满足于24 nm节点集成电路的制备要求,能在直径为300 mm~500 mm的晶圆基底上成型纳米特征的图案,并具有自动装卸晶圆和模板的能力。近年来,国内针对纳米压印技术,也相应地做了大量的跟进研究,开展相关研究的研究机构主要有:上海交通大学、华中科技大学、哈尔滨工业大学等。文献[8]研发的大行程纳米压印光刻机宏动部分的行程为100 mm*100 mm*100 mm,重复定位精度达到 3 μm*3 μm*3 μm。
本文旨在研发一台能够实现大行程、微米量级定位的二维精密定位平台,为大面积纳米压印的实现提供装备支持。
1 大行程二维精密定位平台的机械结构设计
根据大面积纳米压印需求,本文研究的大行程二维精密定位平台的技术指标如表1所示。
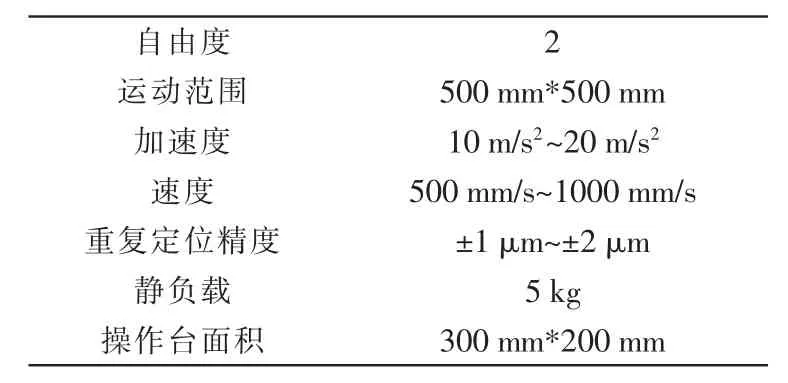
表1 面向纳米压印的大行程二维精密定位平台技术指标Tab.1 Technical specifications of large travel 2-D precision positioning platform for nanoimprint
基于上述考虑,本设计采用类似的模块化设计的串联式龙门结构。X向系统采用单轴龙门双驱结构,Y向系统耦合叠加在X向系统之上,设计的大行程二维精密定位平台3D模型如图1所示。X、Y向系统均采用超高精度的双直线滚动导轨(双滑块∕条)导向;平台采用隔振、变形系数小的大理石做基板;XY转接板借助理论和FEM分析优化设计,采用航空铝合金7A04机加成型,并与四条鱼腹梁拼装获得满意的抗弯截面系数。为平台优化设计的刚性支架能够起到支撑和隔振的作用,采用坦克链实现对线缆的科学管理,采用风琴罩及特殊设计的防尘附件保持直线电机和光栅尺的清洁。

图1 面向纳米压印的大行程二维精密定位平台3D模型Fig.1 3D model of large-stroke 2-D precision positioning platform for nanoimprinting
2 二维高速高精密定位平台电控系统设计
2.1 电控系统的整体设计
基于永磁同步直线电机伺服控制原理,大行程二维精密定位平台电控系统框图如图2所示,该电控系统主要涉及到IPC、运动控制器、交流伺服驱动器、反馈传感器等设备。
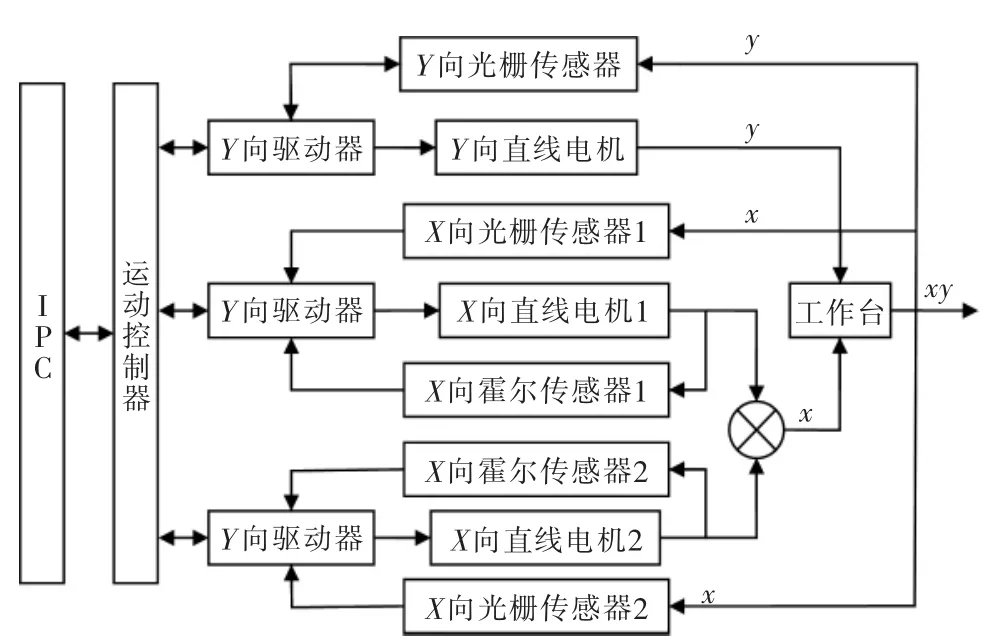
图2 大行程二维精密定位平台的电控系统框图Fig.2 Electronic control system block diagram of large travel 2D precision positioning platform
2.2 直线电机的工作原理与选型
2.2.1 直线电机的工作原理
结构形式上,直线电机与旋转电机展开后的模型相似,相应地,直线电机和对应形式的旋转电机的电磁原理也类似。就交流永磁同步直线电机而言,其在结构形式上与交流永磁同步旋转电机相似(图3),那么其电磁原理也就类似于交流永磁同步旋转电机。

图3 交流永磁同步直线电机原理示意图Fig.3 Principle diagram of AC permanent magnet synchronous linear motor

式中:f1为电枢电流的频率;np为电机磁极对数。同步旋转磁场和永磁体建立的磁场相互作用,完成电能向机械能的转换,即旋转电机将电功率转换为机械功率,并以转速和力矩的形式输出。
而对于交流永磁同步直线电机,电机动子中三相交变的电枢电流在气隙中建立了行波磁场,行波磁场的速度与直线电机电枢电流频率、磁极距之间存在类似式(1)的关系,行波磁场和永磁体磁场相互作用,同样使直线电机完成了电功率向机械功率的转换,并以电机推力和速度的形式输出。
2.2.2 直线电机的选型
电机是面向纳米压印的大行程二维精密定位平台驱动单元的核心,机械系统的质量和平台的速度等指标决定了选配电机的性能参数,而电机的电气特征又决定着驱动器等设备的选配。因此,本文研究中对选用的永磁同步直线电机做了慎重的选型分析,具体选型流程如图4所示,最后选择了荷
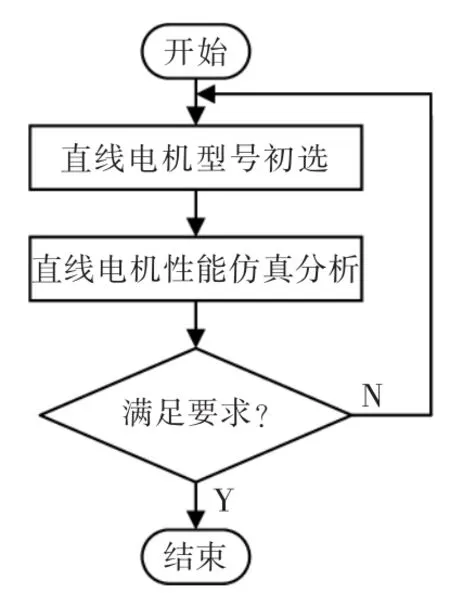
图4 电机选型流程Fig.4 Flow chart of motor selection
对于交流永磁同步旋转电机,当电枢绕组中通以三相交流电时,交变的电枢绕组电流在气隙中建立旋转磁场,旋转磁场的转速为同步转速n1:兰TecnotionUL系列的两款电机。通过荷兰Tecnotion公司提供的仿真软件进行仿真后,分析可知,荷兰Tecnotion UL 15N交流永磁同步无铁心直线电机,在加速度、输出力、电枢电流和温升等方面均能较好地满足面向纳米压印的大行程二维精密定位平台的使用要求。
2.3 反馈传感器的选型
全闭环控制对面向纳米压印的大行程二维精密定位平台高精度指标的实现具有重要意义,直线运动反馈传感器的分辨率直接决定了全闭环控制系统的精度。然而,直线运动反馈传感器的分辨率与其检测速度之间存在类似反比的关系,选型时不能一味地追求高的分辨率,应该综合考虑速度、精度和成本等多重因素,通常按照式(2)选配的运动量传感器能较好地满足使用要求。

式中:ne为传感器的分辨率;n0为控制系统精度。
本研究中为大行程二维精密定位平台选配的运动反馈传感器为英国Renishaw公司的增量式直线光栅传感器,分辨率为0.1 μm,大行程二维精密定位平台X、Y向速度和精度等指标一致,因此选用的光栅传感器型号一致。
2.4 驱动器的选型
面向纳米压印的大行程二维精密定位平台要实现平面内插补运动控制,高性能运动控制器不可或缺,而控制器的主控单元相比驱动器的主控单元具有更优的性能,因此由运动控制器完成速度闭环和位置闭环,并通过低电平使能驱动器使其完成电流换相和电流闭环工作,此时驱动器相当于一个跨导放大器。
经市场调研,并根据交流永磁同步直线电机选型时仿真分析得到的电流等电气参数,为永磁同步直线电机UL 9N、UL 15N选配的交流伺服驱动器为以色列ELMO公司的Standard cornet,驱动器型号分别为Standard cornet 5/230、Standard cornet 9/230。Cornet系列驱动器系统中的控制单元可独立地实现电流环、速度环和位置环的调节和控制,并且三环调节器均具有较高的性能。
2.5 控制器的选型
运动控制器在闭环集中式运动控制系统中扮演着重要的角色,本文研究的系统中,运动控制器主要负责执行运动控制程序并向电机驱动器发送运动控制命令以及对控制系统的安全监视和保护等工作。面向纳米压印的大行程二维精密定位平台要实现o-xy平面内复杂的定位和多轴插补运动,要求其控制器必须具有高性能的数字式信号处理器,并支持3通道及以上多电机的同步控制,支持复杂的平面甚至空间多轴插补运动,软件上要求控制器具有简单友好的程序开发、调试以及数据处理和显示能力。综合考虑,为面向纳米压印的大行程二维精密定位平台选配了泰道(中国)IMAC 400运动控制器,IMAC 400具有系统再集成方便的优点。
2.6 电控系统的搭建
采用上述电控系统设备,依据图2所示的大行程二维精密定位平台电控系统框图,为面向纳米压印的大行程二维精密定位平台搭建的电控系统如图5所示。
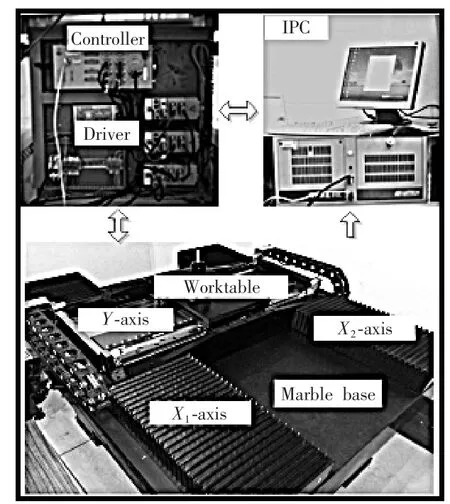
图5 大行程二维精密定位平台电控系统Fig.5 Electronic control system of large-stroke 2-D precision positioning platform
电控系统开发时充分做好了屏蔽和接地保护工作,为防止强电场对弱电信号造成干扰,电机的动力线缆采用双绞屏蔽电缆,在接入驱动器时采用电容磁环将其与周围的弱电场隔离,各电控设备和直线电机均做好了接地保护,DB接头采用金属壳接地的焊接方式。
3 电控系统调节以及参数调试
3.1 伺服电流环和电机电流换相驱动器内调节
Cornet驱动器可以工作在5种不同控制模式下,面向纳米压印的大行程二维精密定位平台选择工作在力矩控制模式,此时电流闭环和电机电流换相由驱动器完成,驱动器相当于跨导放大器。力矩控制命令由运动控制器的模拟输入(-10 V~10 V)得到。X向系统光栅传感器和霍尔传感器的信号和Y向系统光栅传感器的信号引入到相应的驱动器后,再引入到运动控制器相应的反馈通道。要使驱动器和运动控制器交互配合完成对直线电机的伺服控制,需要配置驱动器的使能电平和运动控制器的使能电平特性一致,面向纳米压印的大行程二维精密定位平台的运动控制器IMAC 400出厂默认设置为低电平使能信号输出,因此需配置Cornet驱动器参数IL[1]=0以实现对驱动器的低电平使能。
完成上述Cornet驱动器的参数配置,遵循调试流程对面向纳米压印的大行程二维精密定位平台控制系统伺服电流环和电机电流换相的调节。
3.2 伺服位置环和速度环运动控制器内调节
完成对IMAC 400运动控制器的基本特征配置、对与伺服算法相关的PID增益,速度、加速度前馈、陷波滤波器等关键参数的调节,从而由IMAC 400完成对面向纳米压印的大行程二维精密定位平台控制系统的速度闭环和位置闭环。
相关的配置和调节工作主要通过对相关I参数赋值来实现,初期这一过程主要在Pewin32 Pro软件环境下完成,目前调节得到的满足平台物理系统要求的伺服算法相关参数结果如表2所示。
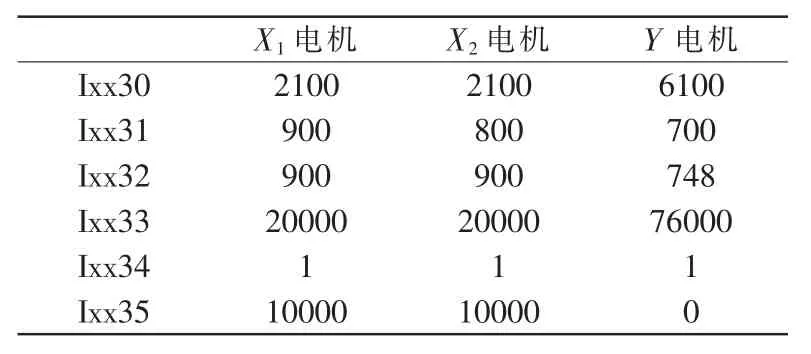
表2 伺服算法相关参数Tab.2 Parameters related to servo algorithm
4 实验测试
面向纳米压印的大行程二维精密定位平台在完成机械装配和电控设备的初步配置后,采用美国光动公司激光干涉测量仪MCV5000进行测量,该激光干涉仪的分辨率是1 nm,精度可达20 nm,激光干涉仪可以设置采样参数,并对所采集的点的位置进行处理,可以精确的得出平台移动的精确参数信息,并可以转化为曲线。为大行程二维精密定位平台性能现场测试搭建的实验系统如图6所示。

图6 平台的实验系统Fig.6 Experimental system of the platform
通过激光干涉仪测得得性能参数如表3所示,各项性能参数均满足指标要求。

表3 面向纳米压印的大行程二维精密定位平台技术指标Tab.3 Technical specifications of large travel 2-D precision positioning stage for nanoimprint
5 结语
本文设计开发了一台面向纳米压印的大行程二维精密定位平台。对平台的整体结构和电控系统进行了合理的设计与搭建,并完成对电控系统伺服参数的调试。利用激光干涉仪搭建了面向纳米压印的大行程二维精密定位平台的实验测试系统,并对平台的整体性能进行测试。实验结果表明,该平台X、Y轴的行程都达到500 mm;X轴速度和Y轴速度分别达到700 mm/s,600 mm/s;加速度都达到了1.5g;重复定位精度都在2 μm以内。该平台满足纳米压印领域精密定位的需求,为精密定位的研究提供了参考。
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
小学生导刊(2018年13期)2018-11-30
北京航空航天大学学报(2017年5期)2017-11-23
小学生导刊(低年级)(2017年2期)2017-06-10
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
新高考·高二数学(2014年7期)2014-09-18
客车技术与研究(2014年6期)2014-02-28
