大型浮托安装驳船在极浅水中的运动特性和触底条件分析
2018-07-30 09:19吕海宁熊凌志
船舶力学 2018年7期
杨 光,吕海宁,熊凌志,杨 宁
(1.海洋石油工程股份有限公司,天津 300451;2.上海交通大学 海洋工程国家重点实验室,上海 200240)
0 引 言
导管架平台作为固定式平台,被广泛应用于我国渤海、东海等浅水海域的海洋油气资源开发。近年来,随着海洋工程技术的不断发展,导管架平台的功能和结构也渐趋复杂化和大型化,其上部组块结构重量和尺寸不断增大,使得其海上安装越来越具有挑战性[1]。
导管架平台上部组块的海上安装主要通过吊装法和浮托法完成。其中,浮托法是利用运输驳船将上部组块运输至导管架预定安装位置,通过系泊、动力定位等方式保持驳船和上部组块的运动幅度在允许范围内,通过增加驳船的吃水最终将上部组块平稳、准确地安装到平台上[2]。近年来,导管架上部组块越来越多地采用大型驳船进行浮托安装。相对于传统的海上吊装而言,浮托安装具有安装重量大,安装过程简单,作业效率高,成本低等优势[3]。
然而,在浅水甚至极浅水条件下,大型浮托安装驳船的船底和海底之间的间隙极小,容易发生触底现象,带来极大的安全隐患。以渤海锦州9-3油田为例,其落潮时最小水深仅9.41 m,而驳船的最大吃水可达8.4 m以上,船底与海底间隙仅为1.0 m左右。并且,在浅水条件下,波浪和海流十分复杂,使得大型驳船具有强烈的非线性动力特性,准确预报其运动响应十分困难。准确预测大型浮托安装驳船在极浅水中的运动,保障其作业安全是亟待解决的实际工程问题。
Molin和Fauveau[4]研究了浅水低频长波,并且发现其诱导的载荷会导致系泊浮体的低频慢漂运动。杨建民、李欣等[5-6]通过数值模拟和物理模型实验对一系列单点系泊的浅水浮式生产储卸油系统(FPSO)开展了研究,归纳并提出了浅水效应概念,指出浅水系泊的FPSO具有十分明显的浅水效应,随着水深的减小,系泊浮体的波频运动(横摇、纵摇和垂荡)也随之减小,而低频运动(纵荡、横荡和首摇)则会增加。Yan[7]采用全非线性的数值方法研究了在浅水中系泊的FPSO,研究表明,在浅水中FPSO的低频运动会更加显著,其所受二阶波浪力诱导的低频运动对于FPSO系泊系统的设计至关重要。
Naciri[8]针对LNG运输船系泊在浅水中的低频运动,发现浅水效应对波浪漂移力有很大的影响,随着水深的减小,浮体受到的波浪漂移力也会相应增加。Pinkster[9]同样对一艘在浅水中系泊的LNG开展数值模拟,认为低频长波对二阶低频力的影响大于一阶波浪力,是浅水效应的明显特征。
为预报二阶波浪力,Newman[10]提出了一种近似方法(Newman近似)来得到二次传递函数(Quadratic Transfer Function,QTF),即通过平均慢漂力矩阵插值得到非对角线元素的值。Naciri和Poldervaart[11]分别使用Newman近似和全QTF的方法对系泊在浅水中的LNG运输船进行数值模拟研究。结果表明,在谱峰周期较短的海况中,两个方法都得到了可信的结果。然而,进一步研究表明,在浅水中,Newman近似会低估浮体的低频运动。Newman[12]证实了该方法的缺点,并认为该方法在水深小于100 m时结果欠佳。Robert和Monica[13]也证实,在浅水中,Newman近似使用会受到限制,并推荐使用全QTF的方法。肖龙飞[14]通过实验和数值模拟研究了软刚臂系泊FPSO的浅水效应。在水深吃水比较大时,Newman近似的方法与实验结果吻合较好;当水深吃水比减小时,Newman近似与实验之间的差别逐渐增大。Guillaume[15]总结了二阶波浪力的计算方法,并得出结论:全QTF的方法可以对浅水中系泊的浮体运动给出比较好的预测。
在浅水中,由于船底与海底的间隙十分狭小,驳船的触底风险尤为需要关注。若驳船发生触底,不仅会影响到自身的安全,还会给上部组块和平台带来无法估量的损害。由此,需要特别关注驳船的垂向运动。对于驳船,其最可能发生触底的位置为船首和船尾左右两舷侧的位置。在之前的浅水领域的研究中,国内外的学者主要关注FPSO、LNG运输船等类型的浮体。然而在实际工程中往往有许多工程辅助船系泊在浅水海域作业,此类船型的型线与FPSO等有较大的区别,其运动响应特性也较为特殊,同样面临着触底的风险,所以对于此类船舶需要引起足够的重视,但相关的研究国内外都较为少见。本文针对一艘大型的浮托安装驳船系泊在极浅水海域(水深/波长小于1/8~1/10)的运动性能和触底条件进行研究,最终得出了其作业时发生触底的条件,为今后的工程作业提供参考。
1 数值理论
1.1 速度势的求解
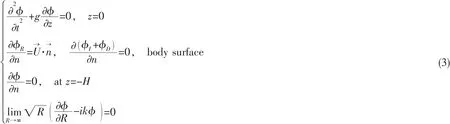
根据三维势流理论,流场速度势满足拉普拉斯方程[16-17]:

其中:x,y,z分别表示空间三个方向的坐标,t为时间。若假定自由表面的波浪运动及结构物的运动是微幅的,则可认为速度势是线性的,上述Laplace方程和各个边界条件也均为线性。应用叠加原理,可将流场中总的速度势分解为入射波速度势、绕射势和辐射势[18]。

上述各速度势可结合流场边界条件进行求解。
1.2 二阶波浪力的求解
常见的二阶波浪力计算方法有三种,分别为远场法,中场法和近场法。其中,远场法是对压力在无穷远处的控制面进行积分,该方法简单直接,求解速度快,但只能计算平均漂移力,不能计算得到非对角线位置的慢漂力。中场法是在流场中的任意位置建立控制面,并在面上积分,适合处理多体问题,并且简单方便,计算效率高。而近场法则直接在物面进行压力积分,该方法较为直观,各项物理含义清晰,容易理解。本文即采用近场法求解二阶波浪力。
近场法的求解过程为:首先得到物面的非线性压力,然后在瞬时湿表面上积分,从而得到物面上的压力,从中分离出二阶成分[19]:

其中:ΔS是瞬时湿表面,

从而,得到二阶波浪力的表达如下:

由(6)式可以容易得到在随机海况中二阶波浪力的表达形式(忽略和频成分):

式中:Pij和Qij分别为二次传递函组成部分,具体推导过程可参考文献[10]和[17]。根据给定的波浪谱,可求得低频成分的谱密度函数:

其中:SF(ω )为力的谱密度,Sζ(ω)为波浪谱密度。
驳船数值计算面元模型和二阶面模型如图1所示。
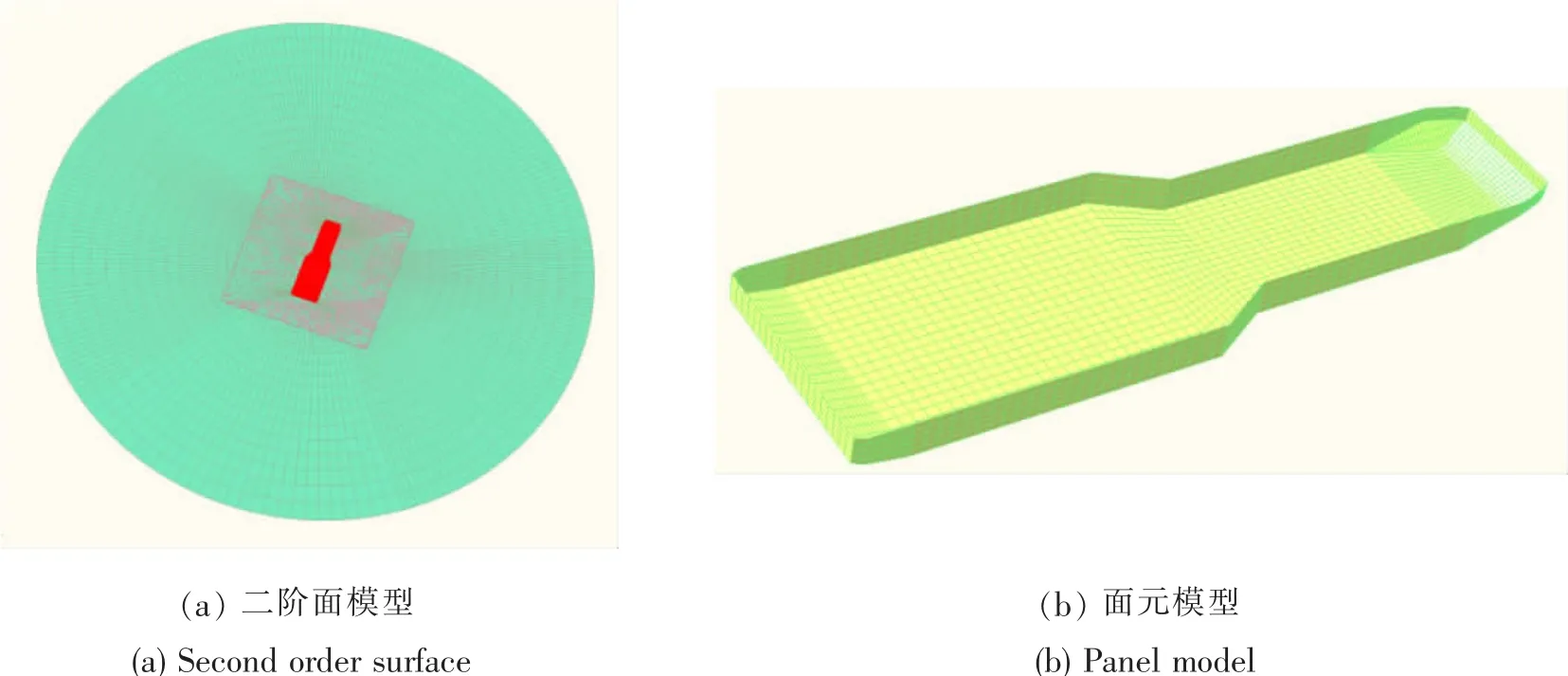
图1 浮托安装驳船数值模型Fig.1 Numerical model of floatover installation barge
2 物理模型实验
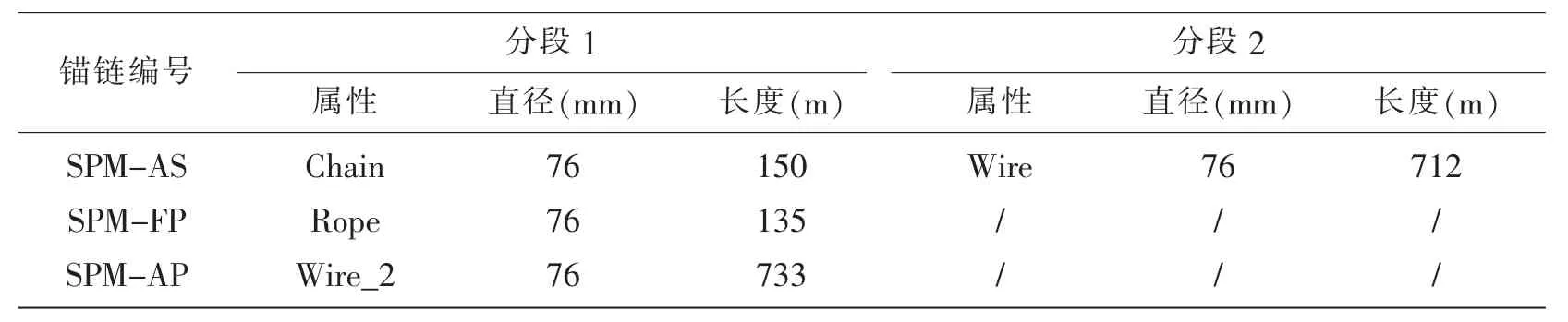
模型实验在上海交通大学海洋工程水池完成。为尽量减小尺度效应所带来的误差,选择相对较大的模型缩尺比λ=1:30。驳船的主尺度如表1所示,其系泊系统的属性如表2和表3所示。为避免与海底已有管道发生碰撞,驳船采用了较为特殊的非对称系泊系统,如图2所示。
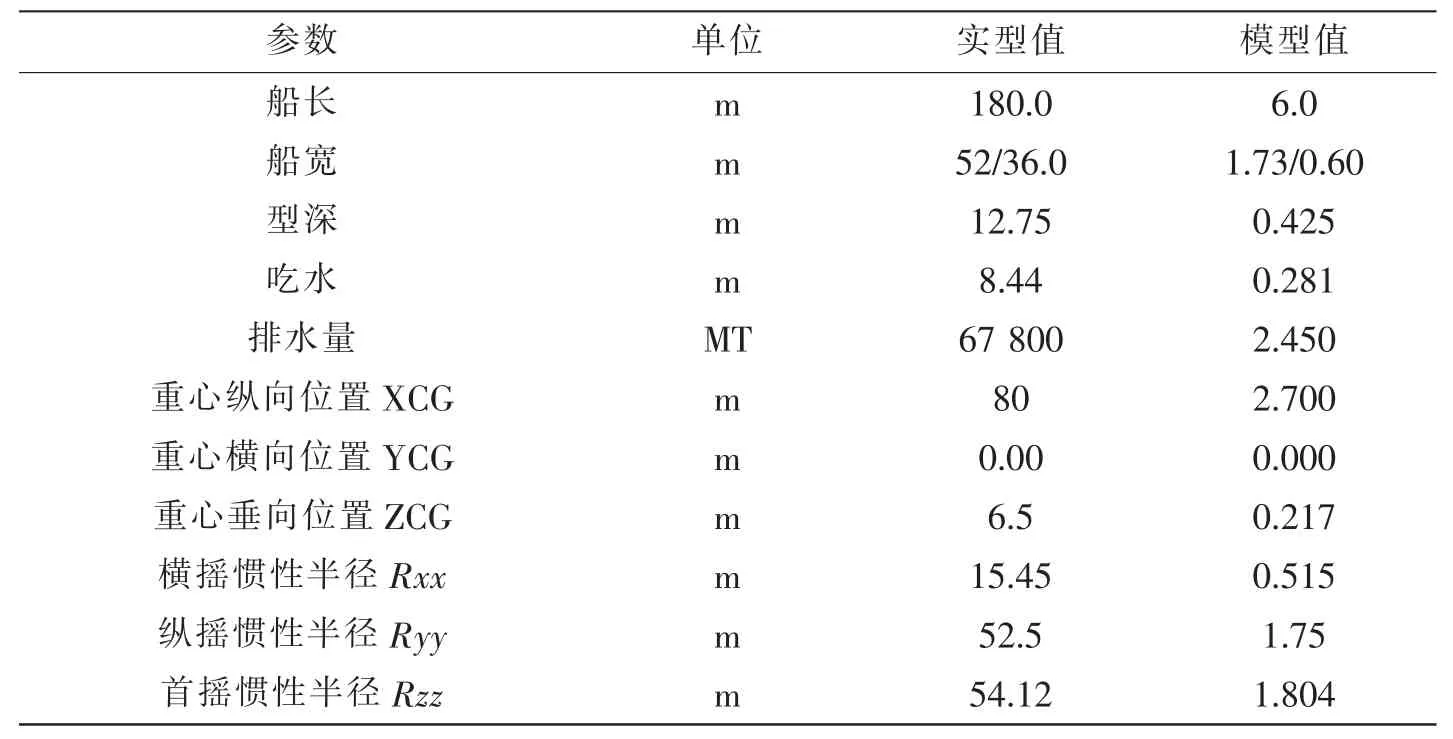
表1 浮托安装驳船主尺度Tab.1 Main dimensions of the barge

表2 驳船系泊系统Tab.2 Mooring system configuration
续表2

表3 系泊缆的材料属性Tab.3 Material property of the mooring lines
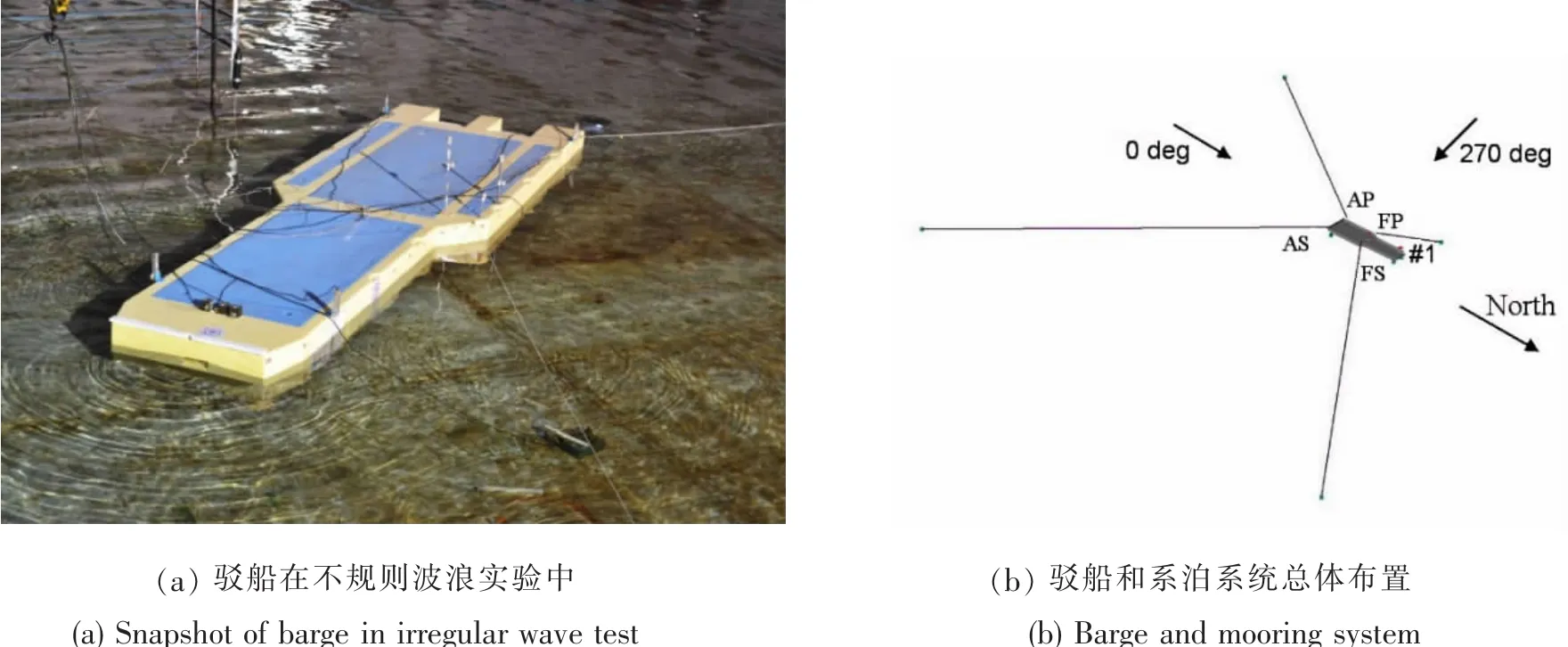
图2 驳船物理模型及其系泊系统总体布置Fig.2 Configurations of the barge and mooring system
实验中采用非接触式光学六自由度运动测量仪实时测量驳船的六自由度运动,采用拉力传感器,线加速度传感器和角加速度传感器分别测量锚链张力,驳船的线加速度和角加速度。此外,为监测驳船触底情况,在船首和船尾两舷侧的位置还分别安装位移传感器,若驳船发生触底,则位移传感器会记录下碰撞信号。
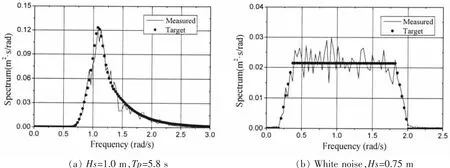
图3 目标波浪谱和实际波浪谱Fig.3 Target and measured wave spectrum
实验中的不规则波浪均采用JONSWAP谱,并在实验前进行波浪模拟,模拟结果如图3所示。具体的实验工况如表4所示,其中包含不同的水深、波浪入射角度、有义波高和谱峰周期等。
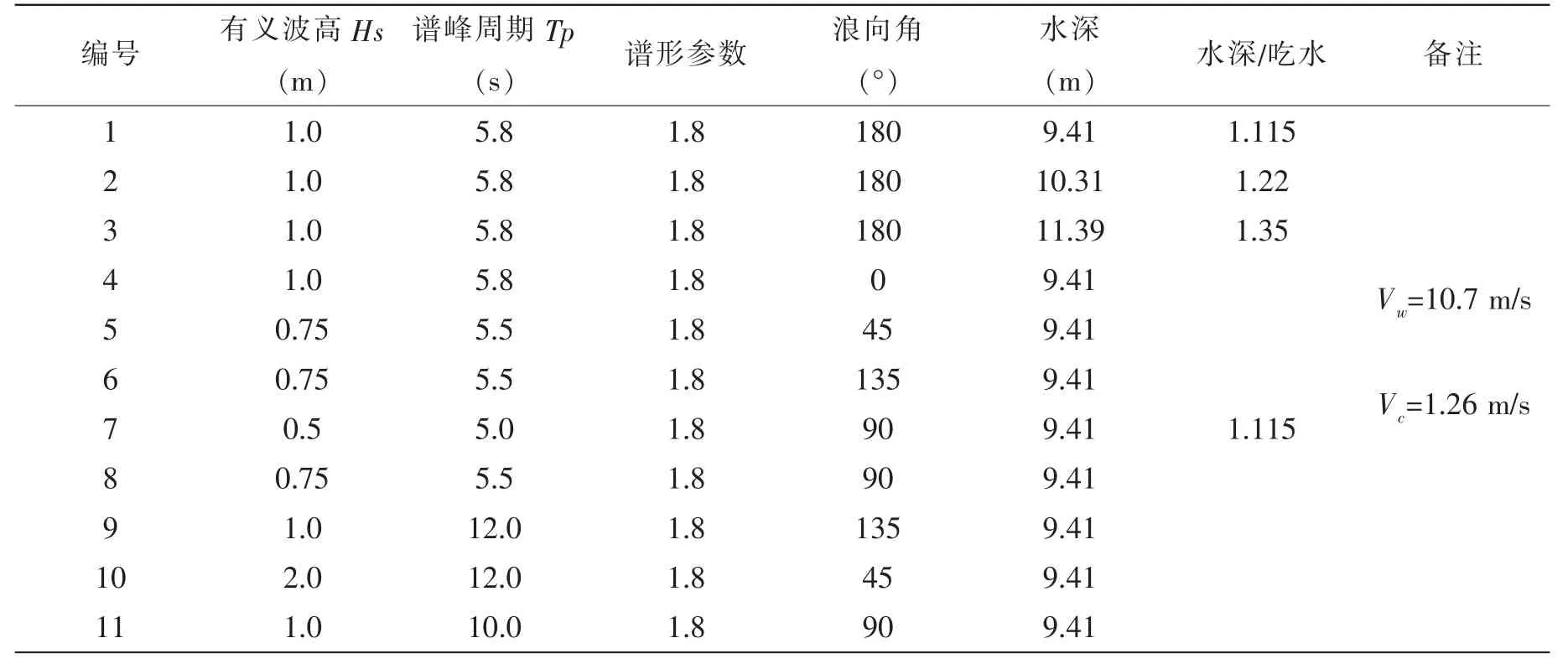
表4 实验工况列表Tab.4 Matrix of the model test
3 结果分析
3.1 驳船运动传递函数
图4所示为水深吃水比γ为1.115(水深9.41 m,吃水8.44 m)和接近无穷(3 000 m水深)时,数值计算和模型实验所得到的运动传递函数(RAO)。由图4中可以看出,在γ=1.115时,驳船运动RAO的数值计算结果与模型实验结果总体上相互吻合较好,表明数值计算和模型实验都可以较为准确地预报驳船的总体运动响应。
而将γ=∞与γ=1.115时,驳船运动的RAO相比较,发现两者具有明显的差别,这是浅水效应的具体体现。
对于纵荡、横荡和首摇运动(即水平面内的低频运动),在浅水中的差别主要体现在低频区域。从图4(a),(b)和(e)中可以看出,在水平面内的三个运动的能量几乎全部集中在在低频区域,而高频部分几乎可以忽略。而在浅水海域会存在低频长波(set-down)和海岸低频波浪(infragravity wave),这些波浪随着水深的减小,在低频部分的能量随之增加[14]。因此,导致了水深变浅时驳船纵荡运动的增加。
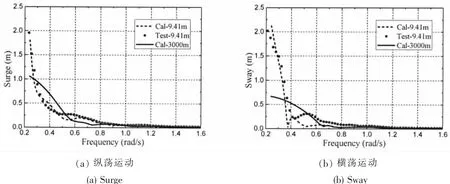
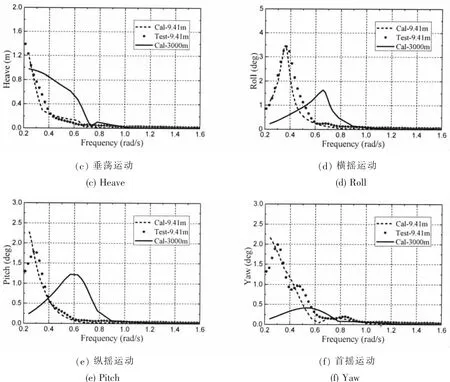
图4 不同水深条件下,驳船的运动传递函数(RAO)Fig.4 Response amplitude operator(RAO)of the vessel in different water depths
对于垂荡、横摇和纵摇运动(即垂直面内的波频运动),其差别主要体现在振荡固有频率的变化:随着水深减小,驳船运动的固有频率也相应地减小。其主要原因是,随着水深的减小,受海底边界条件的影响,使得驳船这三个自由度上的附加质量显著增加[14],进而导致固有频率也随之增加。
3.2 水深变化对驳船固有周期和阻尼的影响
驳船的固有周期和阻尼是表征其运动特性的重要参数。其中固有周期的大小决定了其作业窗口,而阻尼的大小会直接影响其响应的运动幅值。本研究比较了水深吃水比为1.115,1.22,1.35,1.65和2时,驳船的固有周期和阻尼变化。
从图5中可以发现,随着水深吃水比的减小,驳船的垂荡,横摇和纵摇的固有周期均显著增加。其中纵摇固有周期的增加幅度最大,当γ从2减小到1.115时,其增加幅度达到了159%。而横摇和垂荡固有周期的增加量分别为59%和128%。其增加的原因解释如下:众所周知,驳船的每个方向的固有周期均与其自身重量和该方向的附加质量总和的平方根成正比,与其该方向恢复力系数成反比。由于其自身恢复力系数取决于自身形状,不会随水深变化。而当水深吃水比较小时,其附加质量会受水深影响,并且明显增加,从而导致了自身固有周期的增加。由于固有周期的增加使得其远离常见的波浪频率,所以这会缓解驳船的运动。例如,渤海地区常见波浪周期在1-13 s,而γ=2时,垂荡固有周期为9.5 s,正好处于常见的波浪范围内,这将有可能导致较大的垂荡运动,从而增加驳船触底的风险。

图5 驳船固有周期随γ变化趋势Fig.5 Trend of natural period against γ
驳船的阻尼系数均表示成其相应方向上临界阻尼的百分比形式。其中,在图6中所示为垂荡和纵摇阻尼,而横摇阻尼展示在图7中。在γ从2减小到1.115的过程中,垂荡阻尼先减小后增加,而纵摇的变化正好相反,为先增加后减小。该变化可能的原因值得进一步研究。对于极浅水的情况下最关心的垂荡运动,其在γ=1.115时的阻尼已经达到了较大的值,并略微大于γ=2时的阻尼。这也对缓解驳船在极浅水的垂荡运动有着积极的作用。横摇的阻尼系数随着γ的减小显著增加,增幅达到了26%。这将减小驳船在极浅水中的运动。

图6 驳船垂荡和纵摇阻尼随γ变化趋势Fig.6 Trend of heave damping and pitch damping against γ
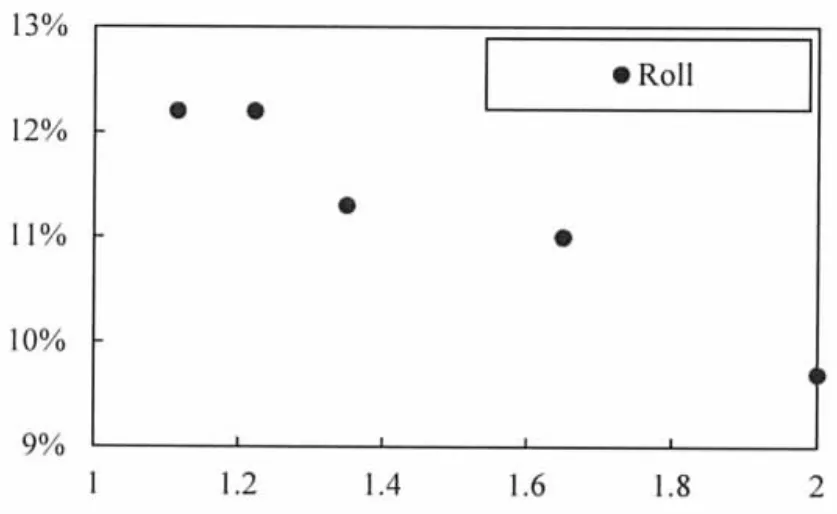
图7驳船横摇阻尼随水深变化趋势Fig.7 Trend of roll damping against γ
3.3 水深变化对驳船运动的影响
图8 为驳船在180°浪向下,不同水深条件下的水平面慢漂运动响应。从中可以发现,在仅水深不同的情况下,驳船的三个水平面运动随着水深的减小而明显增加。其中,当γ从1.35减小到1.115时,纵荡运动的幅值增加达67.7%,而其运动的平均值增加则达81.4%。而由于驳船系泊系统不对称,导致其有一个初始首摇角,这使得在180°浪向来横荡和首摇均出现了较大的值。其中,当γ从1.35减小到1.115时,驳船横荡运动和首摇运动的最大值分别增加了22.5%和35.2%,运动平均值分别增加了30.0%和46.5%。其原因与前述分析类似,随着水深的减小,波浪中的低频一阶波浪力成分会显著增加,而差频波浪力也会增加。图9为用近场法计算得到Δω=0.04 rad/s时的差频波浪力,该频率与系泊系统的共振频率接近,其对应的差频波浪力易诱发驳船水平面内的大幅运动。从图中可以看出,当γ很大时(如水深为3 000 m),驳船受到的差频波浪力较小;而水深较小时,驳船受到在低频波浪附近差频波浪力会显著增加,并且随着水深的减小,差频波浪力增加得越快,从而使得水平面运动随之增大。
图8 驳船重心处的运动(180°)Fig.8 Barge motion at the COG(180°)
3.4 触底分析
触底现象可以采用视频监控、直接测量和间接推算三种方法进行观察和判断。对于视频监控,即在最可能发生触底的位置安放摄像头,在实验过程中对该位置的驳船运动进行全程观察和录像,如图10所示。而直接测量则是在上述最可能触底的位置分别安装接触式位移传感器,触底的数据会被实时记录。此外,由于驳船重心处的六自由度运动会被实时记录,所以可以通过刚体运动理论推测出驳船所有位置处的垂向运动。通过此运动与水深的比较,可以容易判断驳船是否触底。这三种方法在本研究中均被使用,其中,直接测量结果如图11所示;间接推算结果的最大运动列入表5中。
比较工况1、2和3中的垂荡运动的幅值,可以发现随着水深的减小,垂荡运动会相应变小,表明垂荡运动趋于缓和,这也是该驳船浅水效应的另一个体现。进一步比较工况1、2和3中船底与海底的最小间隙(间隙分别为9.32 m,10.21 m和11.26 m),可以发现,虽然随着水深的增加,驳船的垂荡运动变小,但水深较浅时驳船与海底的间隙仍然小于水深较深时驳船与海底的间隙。所以不难发现,尽管浅水效应使得驳船的垂荡运动趋于缓和,但选择高潮位进行浮托安装可以使驳船与海底保持相对较大的间隙,进而降低驳船触底的风险。
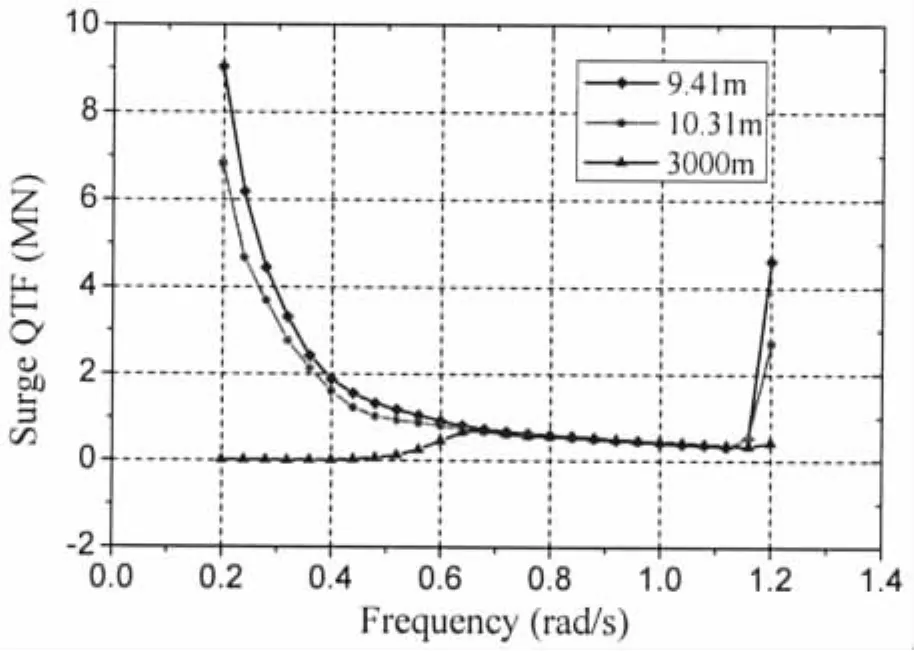
图 9 差频二阶力(Δω=0.04 rad/s,0°-0°)Fig.9 Second order difference force(Δω=0.04 rad/s,0°-0°)
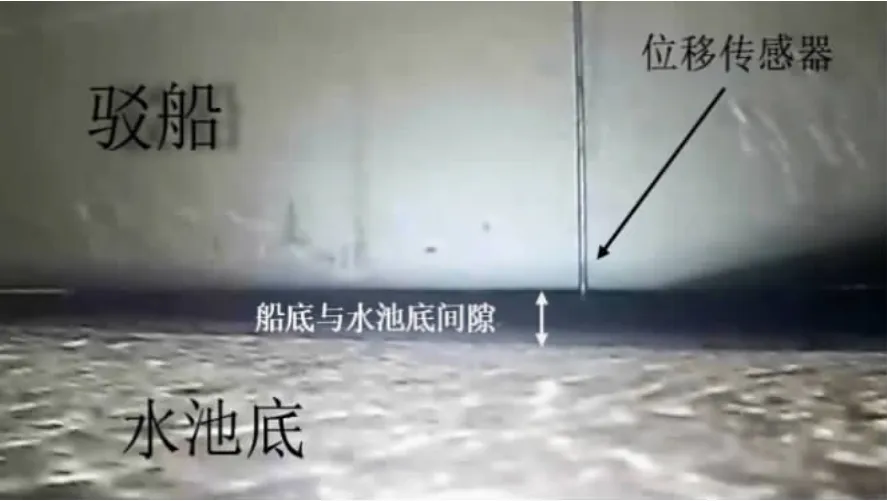
图10 水下摄像机监测视图Fig.10 Monitoring view of the underwater video camera
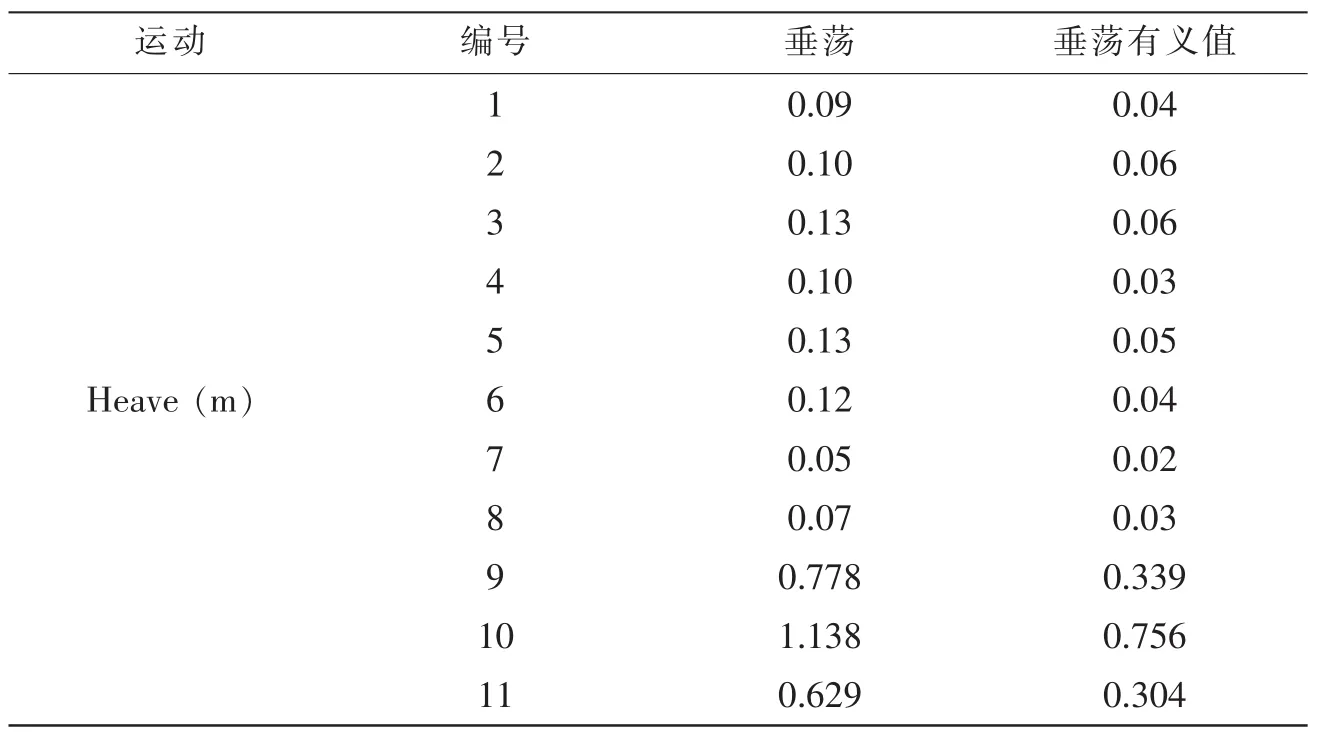
表5 驳船底部垂荡运动幅值Tab.5 Maximum heave motion at the bottom of the barge
为了研究得到驳船发生触底的临界条件,实验中研究了γ=1.115时,不同波浪对驳船运动的影响。如文献[20]中所示,渤海大部分情况下风浪的有义波高为0.8-2.7 m,周期在1-11 s之间,而涌浪波高主要集中在0.3-2.2 m之间,周期分布在1-13 s之间。所以本次研究选取有义波高的范围在0.5-2 m,谱峰周期的范围在5-12 s之间。
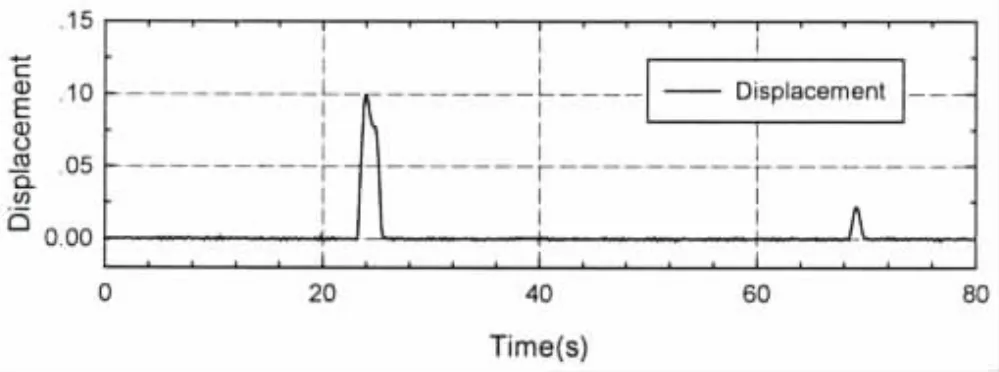
图11 驳船船底触底结果Fig.11 Results of the bottom collision
从表5中可以发现,工况10中,推算得到的驳船船底运动已经达到1.138 m,而船底与海底间隙仅为0.97 m,故此时已经发生触底现象。图11为触底工况中位移传感器的部分时历结果,其中数值的突然跳动表示驳船在该传感器处发生触底。从图中可以看出,驳船在80 s的时间内连续发生两次触底现象,其中第一次触底信号较大,触底情况较为严重,对驳船影响较大。
除工况10之外,其他工况中驳船船底与海底均保持一定距离,即表示驳船未发生触底现象,同时,在驳船上的4个位移传感器中显示驳船也并未发现触底现象。
从上述分析结果中可以看到,比较驳船在不同海况下的垂荡结果,可以发现,周期对于驳船垂荡的影响较为显著,波高次之。当波浪谱峰周期小于12 s,且有义波高小于1 m时,本研究中采用的驳船不会发生触底情况,此时其运动幅值较小,可以进行浮托安装作业。而在渤海的实际海洋环境中,波浪周期一般在8 s以下,出现12 s周期波浪的概率十分小,所以,该驳船在渤海触底的可能性也较少,十分适合在该海域从事相关安装和辅助作业。
4 结 论
本文结合我国渤海锦州9-3油田新建导管架平台的实际工程背景,针对一艘大型浮托安装驳船在极浅水中的运动响应开展了数值模拟和物理实验研究。其中,从驳船运动特性的角度分析,发现随着水深吃水比γ的减小,驳船的RAO、固有周期、阻尼会有显著变化,而变化趋势均会缓解驳船垂向平面内的运动,降低触底风险。从触底的角度分析,可以发现当波浪谱峰周期小于12.0 s,有义波高小于1.0 m时,本研究中的驳船不会发生触底现象,可以安全进行浮托安装作业。具体结论如下:
(1)比较极浅水(γ=1.115)和γ接近无穷时驳船运动的RAO,其结果显示,驳船在两种水深时的运动有显著差异。主要体现在:(a)随着水深的减小,驳船纵荡、横荡和首摇运动在低频波浪中的运动响应会增大;(b)随着水深减小,横摇、纵摇和垂荡运动的固有频率相应会随之增加;
(2)垂荡,横摇和纵摇的固有周期随着γ的减小会显著增加,这将使得其远离渤海常见的波浪周期,缓解运动响应。
(3)横摇阻尼随γ减小而明显增加,增幅可达26%。
(4)尽管水深较小时驳船的垂荡运动趋于缓和,但选择高潮位进行浮托安装可以使驳船与海底保持相对较大的间隙,进而降低驳船触底的风险。
参 考 文 献:
[1]范 模,李 达,马巍巍,等.南海超大型组块浮托安装总体设计与关键技术[J].中国海上油气,2011,23(4):267-270.Fan Mo,Li Da,Ma Weiwei et al.The overal solution design and key technology for float over installation of ultra-large topside in South China Sea[J].China Offshore Oil and Gas,2011,23(4):267-270.
[2]王树青,陈晓惠,李淑一,等.海洋平台浮托安装分析及其关键技术[J].中国海洋大学学报,2011,41(7):189-196.Wang Shuqing,Chen Xiaohui,Li Shuyi et al.State of the art and some key techniques for offshore floatover installation[J].Journal of Ocean University of China,2011,41(7):189-196.
[3]许 鑫,杨建民,吕海宁.导管架平台浮托法安装的数值模拟与模型试验[J].上海交通大学学报,2011,45(4):439-445.Xu X,Yang J,Lu H.Numerical simulation and model test on the floatover installation of jacket platforms[J].Journal of Shanghai Jiaotong University,2011,45(4):439-445.
[4]Molin,B,Fauveau V.Effect of wave-directionality on second-order loads induced by the set-down[J].Applied Ocean Research,1984,6(2):66-72.
[5]Yang J,Xiao L,Peng T.Experimental research on motion performance of large FPSO in shallow water[C].Proc.of the 3rd New S-Tech Conf,2002.
[6]Li X,Yang J,Xiao L.Motion analysis on a large FPSO in shallow water[C].In Proceedings of the Thirteenth International Offshore and Polar Engineering Conference,2003:235-239.
[7]Yan S,Ma Q,Lu J,et sl.Fully nonlinear analysis on responses of a moored FPSO to waves in shallow water[J].Proc.ISOPE2010,Beijing,2010,1:501-507.
[8]Naciri,M,Poldervaart L.Design aspects of SPM LNG terminals in shallow water[C].In Offshore Technology Conference,2004.
[9]Pinkster J.Wave drift forces in directional seas in shallow water[C].In ASME 2009 28th International Conference on O-cean,Offshore and Arctic Engineering,2009:831-842.
[10]Newman J N.Second-order,slowly-varying forces on vessels in irregular waves[C]//Proc Int Symp Dynm Marine Vehicles Struct Waves.IMechE,London 1974:182-186.
[11]Naciri M,Buchner B,Bunnik T,et al.Low frequency motions of LNG carriers moored in shallow water[C].In ASME 2004 23rd International Conference on Offshore Mechanics and Arctic Engineering,2004:995-1006.
[12]Newman J.Progress in wave load computations on offshore structures[C]//In Invited Lecture,23rd OMAE Conference.Vancouver,Canada,2004.
[13]Robert,G,Monica H.Shallow water effects on low-frequency wave excitation of moored ships[C].In Offshore Technology Conference.2004.
[14]肖龙飞.浅水波及软刚臂系泊FPSO浅水效应研究[D].上海:上海交通大学,2007.Xiao L F,Research on shallow water waves and shallow water effects on soft yoke moored FPSO[D].Shanghai:Shanghai Jiao Tong University,2007.
[15]Guillaume d H,Flávia R,Olaf W,et al.Review of approximations to evaluate second-order low-frequency load[C].In ASME 2012 31st International Conference on Ocean,Offshore and Arctic Engineering,2012:363-371.
[16]缪国平,刘应中.船舶在波浪上的运动理论[M].上海:上海交通大学出版社,1989.Miao G,Liu Y.Theory of ship motion on wave[M].Shanghai:Shanghai Jiao Tong University Press,1989.
[17]Zhao W,Yang J,Hu Z,et al.Coupled analysis of nonlinear sloshing and ship motions[J].Applied Ocean Research,2014,47(01):85-97.
[18]杨建民,肖龙飞,葛春花.船舶与海洋工程环境载荷[M].上海:上海交通大学出版社,2008.Yang J M,Xiao L F,Ge C H.Sea loads in naval architecture and ocean engineering[M].Shanghai:Shanghai Jiao Tong University Press,2008.
[19]Pinkster J.Low-frequency phenomena associated with vessels moored at sea[J].Society of Petroleum Engineers Journal,1975,15(06):487-494.
[20]张永宁,李志华,王 辉,等.渤海海域气象,海况对客滚船的影响及对策研究报告[J].船舶大风浪中操纵(下册),2006,2:167-211.Zhang Y N,Li Z H,Wang H,et al.Report of influence and strategy of weather and metocean in Bohai sea on ro-ro passenger ships[J].Manoeuvring Ship in Strong Wind-Sea,2006,2:167-211.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中外文摘(2022年13期)2022-08-02
星星·诗歌理论(2020年3期)2020-04-24
农产品市场周刊(2018年15期)2018-05-16
证券市场红周刊(2018年25期)2018-05-14
证券市场红周刊(2018年40期)2018-05-14
中国房地产业(2016年8期)2016-03-01
火控雷达技术(2016年1期)2016-02-06
船海工程(2015年4期)2016-01-05
小学生·多元智能大王(2014年7期)2014-08-22