
基于TCS230的双路颜色传感检测装置的研制及应用
2018-07-27 06:50邹华东贾瑞清钱礼润
现代电子技术 2018年14期
邹华东 贾瑞清 钱礼润


摘 要: 设计一种基于TCS230的双路颜色传感装置。该传感装置采用两个TCS230颜色传感器联合进行比对检测,装置整体设计成T型槽式机械结构。针对传感器运行工作环境,从结构上对安装尺寸和安装方式进行了优化设计。选择单颜色滤波器测量节省测量时间,选用测周法提高了测量精度,并且通过中位值滤波的数据处理方法提高了测量的准确度。该传感器在AGV智能搬运机器人上得到了很好的應用,确保了机器人对道路禁行标志的准确检测。
关键词: 颜色传感器; 检测装置; TCS230; 中位值滤波; 测周法; 搬运机器人
中图分类号: TN247?34 文献标识码: A 文章编号: 1004?373X(2018)14?0024?05
Development of a double?path color sensing detection device
based on TCS230 and its application
ZOU Huadong1, JIA Ruiqing1, QIAN Lirun2
(1. School of Mechanical Electronic & Information Engineering, China University of Mining & Technology, Beijing 100083, China;
2. Department of Vehicle Engineering, Anhui Vocational College of Defense Technology, Liuan 237011, China)
Abstract: A double?path color sensing device based on TCS230 is designed. In the sensing device, two color sensors TCS230 are used to cooperatively perform contrastive detection. The whole device is designed as a T?groove shape mechanical structure. In consideration of the working environment of the sensor, the design of the mounting dimension and installation method is optimized in structure. The single color filter is selected for measurement to save the measurement time. The period measurement method is selected to improve the measurement precision. The median filtering data processing method is used to improve the measurement accuracy. The sensor is well applied to the AGV smart transfer robot, and the robot′s accurate detection of road prohibitory signs is ensured.
Keywords: color sensor; detection device; TCS230; median filtering; period measurement method; transfer robot
0 引 言
颜色识别在人们的生产生活中较为常见。如食品行业的水果成熟度分辨、印染行业里的布匹色差识别。对颜色分辨的需求也逐渐从几种颜色的区分到细微色差的区分,并越来越趋向于分辨的高速化、智能化,区分颜色也由原来的人眼主导的识别也逐渐被相应的颜色传感器取代[1?2]。
常见的颜色检测系统有彩色面阵CCD构成的计算机图像处理系统,能够获取待测物的RGB分量值,但是其检测成本较高。利用不同颜色和材质的物体对于光线的反射率不同进行颜色分辨的传感器有光敏电阻、色标传感器、红外传感器等,但是其分辨颜色相对种类少,受外部环境光的影响较大,并且要根据不同颜色物体的相关特性在处理电路上进行相关的阈值区分,不适应多种颜色的区分。美国TAOS公司推出的颜色传感器TCS230,根据光的三原色机理[3?5]能够将测到的物体的颜色RGB信号分量转成对应频率信息,通过处理器进一步处理后进行颜色识别,其成本相对低廉,是目前颜色分辨常用的元件。
本文根据机器人道路红色禁行标志颜色识别这一主题,采用TCS230颜色传感器,设计了一种双路颜色传感装置。该装置提高了颜色分辨准确率和分辨效率,在机器人避障上获得了良好应用,并为其他场合的无人驾驶机器人的颜色分辨应用提供了良好借鉴作用。
1 传感器结构及基本工作原理
1.1 颜色识别基本原理
TCS230是TAOS公司推出的可编程彩色光到频率的转换器,它把可配置的硅光电二极管与电流频率转换器集成在一个单一的CMOS电路上,同时在单一芯片上集成了红绿蓝(RGB)三种滤光器,其输出方波频率信号,典型输出频率范围[6?7]为2 Hz~500 kHz。
图1为TCS230的引脚封装图。图中[OE]为传感器使能控制端,OUT为输出端。如表1所示,工作时,通过可编程引脚S2,S3选择所需要的滤波器;两个可编程引脚S0,S1来选择100%,20%或2%的输出比例因子,或电源关断模式。比例因子越小,对同样颜色的检测输出信号周期越长,考虑到响应的及时性,S0,S1直接置为高电平,全频率输出。
1.2 传感器结构及工作原理
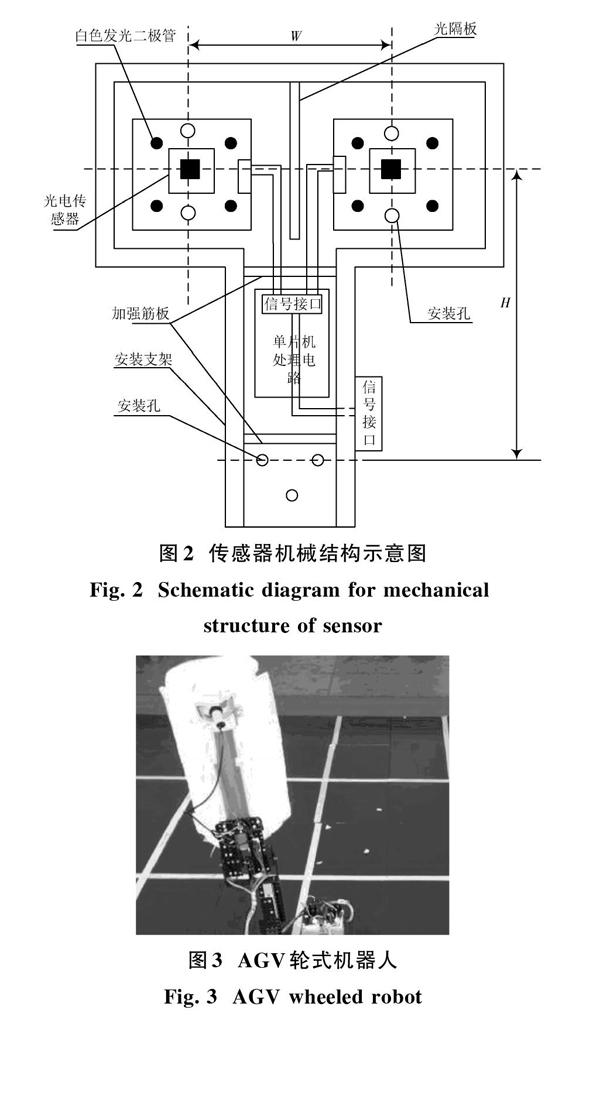
图2为双路颜色传感装置机械结构示意图。TCS230和4个阵列式分布的LED发光二极管设计在同一块电路板上,其中发光二极管用于提供合适的照明。中间隔光板用于分隔左右2個传感器的光源,防止互相间的干扰。传感器检测获得的频率信号通过信号端口与单片机处理电路模块的信号端子连接,通过单片机处理后把检测结果由信号输出端子传于控制机器人的上位机。由于传感装置通过安装孔螺纹连接的方式安装在机器人本体上,通过前端的两个探头进行探测,其安装基本为悬臂梁的模式,为减少传感器装置的上下抖动,在内部安放了两个加强筋板,用于提高刚度。安装支架为整体的T形槽,T型槽结构具有防尘、阻隔外部杂散光的作用。
图3为AGV轮式机器人实物图。其主要包括机器人抓取装置、运动本体、巡线模块、颜色检测装置等。机器人按照规划路径通过巡线传感器检测引导线,控制车身沿着白色引导线稳定前行,图中的红色圈为禁止通行标志,根据需要随机放置,即使规划路径经过该交叉点,机器人也不得从禁行标志处通过,需要自动绕开该位置。整个场地分为绿色背景、白色引导线、红色禁行标志三种颜色。
机器人本体的巡线传感器为光敏电阻,通过阈值区分绿色和白色两种颜色。禁行标志为红色,一方面巡线传感器无法区分,另一方面,巡线传感器安放在机器人中前部位置,即使能够区分反应时间也不够。如果采用单路TCS230颜色传感器,整个行进采集过程会遇到很多种情况:单一白色、单一绿色、单一红色、白色?绿色、白色?红色、绿色?红色、白?绿?红,在没有比对的情况下出现误判的概率较大。
为了减少误判几率,本传感器采用双路颜色传感器进行检测,其检测的示意图如图4所示。
当机器人本体在姿势正确的情况下,传感器识别红色标志物时,依次经过下面三种状态:绿?绿、绿/红?绿/红、红?红。此时左右传感器的状态测量值基本一致。机器人在姿势偏离引导线一定角度时,其可能情况如图4所示,在机器人巡线稳定,偏离角度θ较小的情况下([±15°以内]),不论何种情况,最终总有一个传感器能够在禁行标志范围内。而对于单传感器的情况,可能出现传感器一直处于临界位置状态,产生误判。综上可以得出,左右传感器只要有一个检测到红色信息即能判断前方存在障碍点。对于临界位置,可以通过延时法利用机器人运动惯性冲过。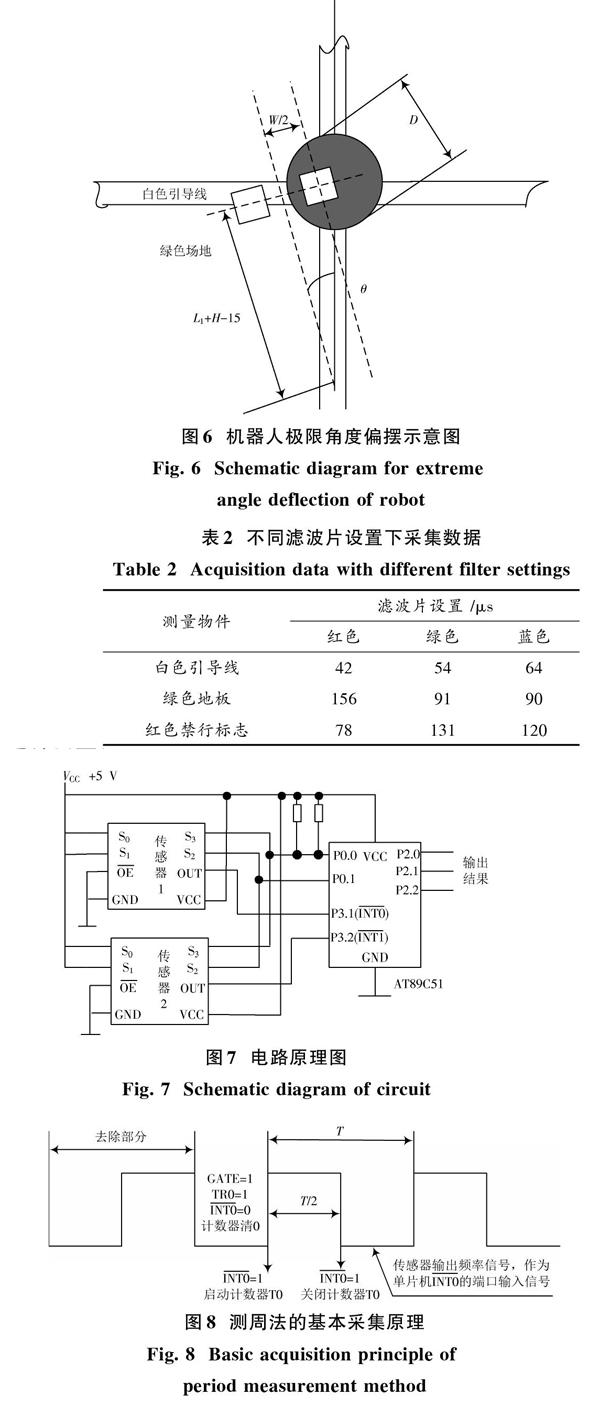
图5为机器人安装上颜色检测装置示意图。白色导向线宽为30 mm,红色禁行标志直径D为100 mm,颜色传感器的光敏面尺寸为4 mm×4 mm。传感检测装置在检测时,需要尽量减少临界位置出现概率,以减少误判率。所以双传感器之间的距离W至少应该满足的条件为30 [(L1+H-15)×tan 15°-W2≤D2-42] (1) 将各参数代入式(1),得H[≤]147.4,为确保至少有一个颜色传感器能够全部进入红色区域,H长度应当尽量短。在考虑到反应时间情况下,经过综合测试,取H为95 mm。 2 测量速度和精度提升方法 2.1 测量方法提升精度 机器人在运动时,其对于前方道路的预判具有实时性,需要传感器的响应速度与运动速度相匹配。选用速度较快的处理芯片是其中的一种方法,但是增加了成本,从测量方法和测量原理上入手来提升测量速度是有效且可靠的。 由于TCS230颜色传感器输出的是频率信号,单片机对于频率信号的常用测量方法有测频法和测周法。对于频率较高的信号,由于其周期较短,如果采用测周法,误差在单片机的一个计数周期范围内,测量相对误差较大,而采用测频法,在一定的时间间隔内计算方波个数,据此计算出其周期,误差相对较小。对于频率较低的信号,采用测周法引起的相对误差较小,测频法由于除法引起的舍去误差造成较大的测量相对误差。对于方波信号,测周法由于只需测量半个周期的时长,与测频法相比,相对费时较少。表2为颜色传感器在距离检测物表面20 mm,选用不同的颜色滤波片,设置100%输出比例因子,由示波器采集的输出信号的周期数据(无色滤波片由于各颜色物体的周期数据较为接近,区分度不够大,本表未列)。 由表2可以看出,周期最长的为156 μs ,其周期与单片机的计数器计数周期相比较大,适合采用测周法。障碍标志物的直径为110 mm,机器人的平均运行速度为0.5 m/s,正常走过110 mm距离的时间为0.22 s; 而采用测周法的耗费时间大约为1.5个周期,即0.3 ms以内,检测时间远快于运行响应需要。
电路原理如图7所示,S0,S1都连接高电平,为全频率输出模式,芯片使能信号[OE]连接低电平,为工作状态,S2,S3与单片机AT89C51的P0.0,P0.1引脚相连,由单片程序控制引脚电平选择对应滤波器,两传感器输出引脚分别接到外部中断引脚[INT0],[INT1],通过单片机程序进行测量。
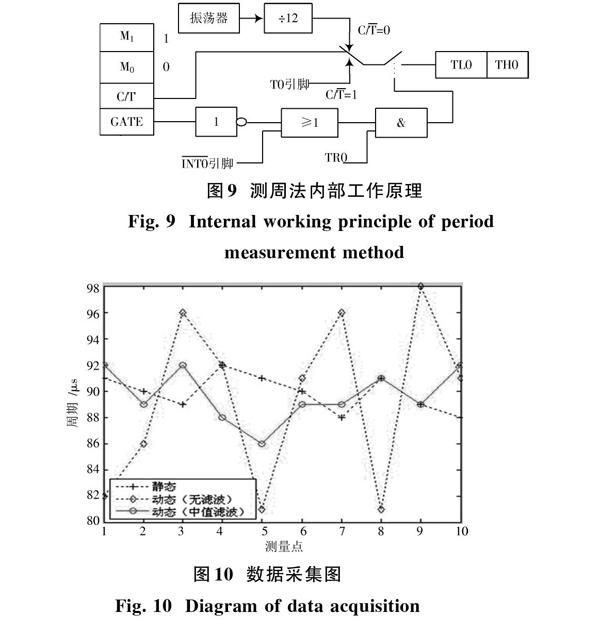
测周法的主要原理是采用单片机定时器计算方波半周期的时长。如图8所示,在开始采集时,传感器输出的方波信号[INT0]不管当前处于低电平还是高电平状态,都一直等待,直到第一个周期结束。该步确保单片机有足够时间进行相关设置。第二个周期开始,信号处于低电平时,在寄存器TMOD中设置T0的门控位GATE=1,TR0=1,此时[INT0]的信号为低电平,定时器启动条件不满足,同时设置C/[T]=0,M1M0=01,采用定时方式1,即16位计数方式,单片机晶振(12 MHz)的12分频作为定时器计数基准,计数周期为1 μs;当信号[INT0]的上升沿到来时,自动启动定时器计数,当信号下降沿到来时,关闭定时器T0,将定时器内的数值取出就是所测信号半周期,其内部工作逻辑关系如图9所示。
传感器TCS320通过调节颜色滤波片设置,使特定的原色光通过,阻止其他原色光通过,为了获取目标物的R,G,B分量值,需要测量三次频率信息,相当于单一分量测量的3倍时间。由表2可知,选择红色滤波片绿色背景和红色禁行标志的差异较大,而且禁行标志和标准的白色引导线周期数据相比,也有较好的区分度。所以如果只是区分不同物体的颜色,通过测量单一红色分量就能够很好区分。如果具有更多颜色区分的场合,在保证良好的分辨特性的前提下,也可以通过单绿、单红、单蓝、红绿、红蓝、绿蓝等多种方式中选择某种方式,从而提高检测效率。本方案选择单一红色滤波器进行检测。
2.2 数据处理提升精度
机器人在运动过程中不可避免会出现振动,传感器安装于机器人的前部,产生振动的主要原因有电机工作时的振动、工作场地不平整所引起的振动、前方空气阻力产生的振动等。振动会导致传感器上下摆动,而颜色传感器在不同的高度测量同一物体的颜色输出频率的差异性较大,影响到测量结果的准确度。另外一方面,由于机器人的运动,如果对同一位置多次采样,在采样时间内,机器人位置发生了变化,会导致不同时刻采集的数据属于不同位置的颜色信息。因此必须选择合适的数字滤波算法来剔除错误的采样数据。
常用的数字滤波算法有: 中位值平均滤波法、平均值滤波、中值滤波、限幅滤波和惯性滤波等[1,8?10]。传感装置的安装是悬臂梁的形式,其振动往往是以安装水平作为振动中心上下摆动,经过试验传感器距离目标的距离与输出结果呈现较好的线性关系,所以选择平均值滤波或者中位值平均滤波法都具有可行性。在样本数N取值为5的情况下,采样测量的时间大致为 2.3 ms, 按照机器人运行速度为0.5 m/s的速度,采样时间里的位移为1.15 mm,在可以接受的范围内。中位值滤波的运算速度比平均值滤波快,其在滤除脉冲噪声的同时可以很好地保护信号的细节信息。所以方案选择中位值滤波。图10为选择绿色滤波器,在静止情况下、运动情况下(不做滤波)、运动情况下(中位值滤波),对同样的绿色场地10次采样值。由图10可以看出,在静态采样的情况下,采集数值的变动范围在5 μs以内,而动态无滤波的采样器数值变动范围很大,到20 μs,采用中位值滤波的方法,其变动范围在7 μs左右,虽然大于静态采集的范围,但是动态范围远小于无滤波动态采集。所以中位值滤波动态采集的方法有效地提升了采集精度,确保了采集数据的可信度。
3 结 语
本文设计了一种颜色检测装置,在分析了机器人位置误差、外部光干扰、场地条件、临界位置对颜色检测效果的影响基础上,从机械结构上对传感装置进行了安装尺寸、安装部件的优化设计,并且采用双颜色传感器联合检测的模式提升检测准确度。通过选择单颜色滤波器进行测量节省了测量时间;选择舍去第一周期的测周法来提升测量精度;采用中位值滤波数据处理方法提高测量精确度。该传感器在AGV智能搬运机器人上得到了很好的应用,确保了机器人能够实时、准确地识别道路禁行标志。该传感器主要是在分析传感器特性、现实条件限制的基础上对TCS230颜色传感器的一种创新应用,其设计思路和方法对于其他类型传感器的设计应用具有较好的借鉴作用,该传感器经过改进后也可以用于其他自动导航机器人需要多种颜色辨识的场合。
参考文献
[1] 赵万剑,徐耀良,王博,等.颜色传感器TCS230在纠偏控制系统中的应用研究[J].传感技术学报,2011,24(12):1804?1808.
ZHAO Wanjian, XU Yaoliang, WANG Bo, et al. The application and research of TCS230 color sensor in correction control system [J]. Chinese journal of sensors and actuators, 2011, 24(12): 1804?1808.
[2] 陈熵,陶栋材,刘新庭,等.基于TCS230传感器的新鲜辣椒颜色识别研究[J].中國农学通报,2015,31(17):267?271.
CHEN Shang, TAO Dongcai, LIU Xinting, et al. Research on color identification of fresh pepper based on TCS230 colorimeter sensors [J]. Chinese agricultural science bulletin, 2015, 31(17): 267?271.
[3] 谢发忠,邹华东,吴年祥.基于TCS230的颜色检测装置及其在智能装配机器人避障中的应用[J].工程设计学报,2013,20(1):60?64.
XIE Fazhong, ZOU Huadong, WU Nianxiang. A color detection device based on the TCS230 and its application on the intelligent assembly robot for obstacle avoidance [J]. Chinese journal of engineering design, 2013, 20(1): 60?64.
[4] 郁道银,谈恒英.工程光学[M].4版.北京:机械工业出版社,2016.
YU Daoyin, TAN Hengying. Engineering optics [M]. 4th ed. Beijing: China Machine Press, 2016.
[5] 陆徐平,徐耀良,李渝曾,等.基于TCS230的新型雙路颜色传感器的研制[J].电子技术应用,2007,33(8):89?91.
LU Xuping, XU Yaoliang, LI Yuzeng, et al. Development of a new double?path color sensor based on TCS230 [J]. Application of electronic technique, 2007, 33(8): 89?91.
[6] 蒋寅国,邓燕妮.基于TCS3200的多点颜色检测装置的设计[J].仪表技术,2011(3):54?55.
JIANG Yinguo, DENG Yanni. Design of multipoint color measuring device based on TCS3200 [J]. Instrumentation technology, 2011(3): 54?55.
[7] 彭波,李旭宇.TCS230颜色传感器结合BP神经网络在颜色识别系统上的研究[J].食品与机械,2010,26(3):108?112.
PENG Bo, LI Xuyu. Research on color identification by TCS230 color sensor combined BP neural network [J]. Food & machinery, 2010, 26(3): 108?112.
[8] 徐科军.信号分析与处理[M].北京:清华大学出版社,2006.
XU Kejun. Signal analysis and processing [M]. Beijing: Tsinghua University Press, 2006.
[9] 李芹,王伟,彭道刚.过程控制测量信号数字滤波方法优化[J].实验室研究与探索,2016,35(4):26?29.
LI Qing, WANG Wei, PENG Daogang. Optimization of the filtering methods for process control measuring signals [J].Research and exploration in laboratory, 2016, 35(4): 26?29.
[10] 周继裕,陈思露,符少文.基于均值滑动滤波算法和STM32电子秤的设计[J].现代电子技术,2017,40(10):10?12.
ZHOU Jiyu, CHEN Silu, FU Shaowen. Design of electronic scale based on mean sliding filtering algorithm and STM32 [J]. Modern electronics technique, 2017, 40(10): 10?12.
