
基于智能视觉的割草机自动控制系统设计
2018-07-27 05:15:28
计算机测量与控制 2018年7期
(大连海洋大学,辽宁 大连 116300)
0 引言
智能视觉技术是一种通过计算机对摄像头采集的视频信息进行自动分析与处理,完成视频序列中目标区域的目标出现时间、目标运动轨迹等多种信息的捕获,进而对捕获的信息加以分析的技术[1]。割草机自动控制系统可代替或协助操作员完成割草的工作,在降低成本的同时减轻了操作员的负担[2]。将智能视觉技术应用到割草机自动控制系统中,可以自动分析由割草机摄像头拍摄到的草地图像序列,并对草坪图像中出现的异常目标做出及时响应[3]。传统的割草机自动控制系统存在区域切换行为和避障行为能力差、边缘覆盖率低的问题。如若将智能视觉技术引入割草机自动控制系统中,可省略被动录像事后处理过程、减少人力资源的浪费,通过捕获的画面信息,对草地异常现象做好应对措施,有效降低了割草机操作误差[4]。考虑智能视觉技术在割草机自动控制系统中的种种优势,提出设计一种基于智能视觉的割草机自动控制系统。
1 割草机自动控制系统路径规划分析
对基于智能视觉的割草机自动控制系统进行设计之前,需先对割草机自动控制系统中,最关键路径规划进行分析。结合直线循环推进覆盖法和中心辐射扩展覆盖法对割草机路径进行最优规划,依据实际工作环境,做出最准确的路径选择。具体描述如下。
1.1 直线循环推进覆盖法
割草机在工作时以一层为工作单位,对整个草地平面进行层层的推进,直线循环推进覆盖法较为简单。当割草机在草地的边缘处进行180度的转弯时,会出现割草机工作区域重叠的现象[5]。在使用直线循环推进覆盖法时,割草机遇到障碍会选择绕过,然后回到原来的路径继续进行割草的工作,该方法具有工作效率高、重叠区域小和覆盖率高的特点,割草机在工作时使用该方法可以根据草地环境的不同,对割草机的工作路径进行灵活的规划,直线循环推进覆盖法的路径图如图1所示。

图1 直线循环推进覆盖法的路径图
1.2 中心辐射扩展覆盖法
中心辐射扩展覆盖法是在草地中选择一个点作为割草机工作的中心点,然后以割草机工作的中心点向四周草地运动工作并辐射到整个草地平面的工作区域[6]。割草机使用该方法进行工作时可以最大程度的对工作区域进行覆盖,如图2所示。割草机使用该方法工作遇到障碍物时,可以通过基于智能视觉的割草机自动控制系统的调节避开草地中的障碍物继续进行割草的工作。

图2 中心辐射扩展覆盖法的路径图
利用以上割草机自动控制原理,对基于智能视觉的割草机自动控制系统进行优化设计。
2 硬件设计
基于智能视觉的割草机自动控制系统的设计不需要人为的控制和遥控,其目的是使割草机可以自动工作。基于智能视觉的割草机自动控制系统的结构图如图3所示。

图3 基于智能视觉的割草机自动控制系统结构图
首先设计割草机自动控制系统的硬件部分。硬件部分主要由控制单元、驱动单元、定位单元和供电单元组成。四个单元的具体设计描述如下。
2.1 控制单元
基于智能视觉的割草机自动控制系统的核心控制单元采用经济、简单的MSP430F169单片机。控制系统的控制单元是16位的超低功耗的单片机,并通过RISC结构完成控制单元的指令,其周期在125 ns,控制单元中具有运算速度快和处理能力强的硬件乘法器,其工作电压为1.8~3.6 V[7]。当基于智能视觉的割草机自动控制系统在1 MHz时钟条件下进行工作时,其活动模式的工作耗能为280 μA,割草机在待机情况下的功耗为1.1 μA,在关闭状态下割草机的耗能非常低仅达到0.1 μA。在基于智能视觉的割草机自动控制系统控制单元的单片机中设置了I/O端口、USART1及USART0串行通信、比较器A、TA及TB定位器、12位转换D/A和12为A/D。
在基于智能视觉的割草机自动控制系统中以比较输出的方式使MSP430F169单片机的定时器产生PWM波,通过I/O端口将PWM波传送到基于智能视觉的割草机自动控制系统的驱动单元,完成直流电动机的控制。直流电动机的转速由通过系统设定的定时器参数调整的PWM波控制,完成割草机停止、转弯和执行的控制。基于智能视觉的割草机自动控制系统中MSP430F169单片机的定时器通过输入捕获的方式对割草机车轮的转数进行记录,实现对割草机路线的控制。
在基于智能视觉的割草机自动控制系统的设计中,以增计数的方式对控制单元中单片机定时器的计数器进行设置,并将比较/捕获通道1,2设定为比较模式,使引脚P1.3和P1.2进行PWM波的输出。对PWM波的周期T进行控制时,采用写入寄存器CCR0值的控制方法,其中控制通道1,2输出PWM波的占空比分别由寄存器CCR1和CCR2进行控制。将P1.2和P1.3的PWM信号传送到ENA和ENB调速端口,完成对电动机速度的控制,图4为基于智能视觉的割草机自动控制系统的PWM信号输出图。

图4 PWM信号的输出图
2.2 驱动单元
以L298N驱动芯片为主对基于智能视觉的割草机自动控制系统中的驱动单元进行搭建,L298N驱动芯片具有步进机动机和大电流直流两用、高电压的特点。L298N驱动芯片内含有电流桥式驱动器和两个H桥高电压[8],并采用标准逻辑的电平信号对驱动L298N驱动芯片进行控制,L298N驱动芯片可以完成1台步进电动机和两台5-36 V直流电动机的驱动工作。在基于智能视觉的割草机自动控制系统中直流机M1和M2的驱动工作由L298N完成,其路线设计电路图如图5所示。
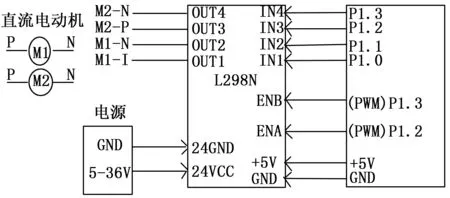
图5 直流电动机控制电路图
将L298N的调速端ENA和ENB与基于智能视觉的割草机自动控制系统MSP430F169单片机的引脚P1.32和P1.3进行连接,当基于智能视觉的割草机自动控制系统的调速端为较高的电平时,割草机的电动机为制动或转动,控制系统的调速端为较低的电平时,割草机的电动机为停止的状态。割草机直流电动机M1和M2的方向是通过单片机引脚P1.0、P1.1、P1.4和P1.6不同的输出组合值对应L298N输入信号IN1、IN2、IN3和IN4的高、低电平组合控制的。当调速端ENA为较高的电平时,输入信号IN1和IN2分别接入高电平和低电平,M1正转。当调速端ENA为较低的电平时,输入信号IN1和IN2分别接入低电平和高电平,M1反转。基于智能视觉的割草机自动控制系统中的直流电动机M2的转动方向由输入信号IN3和IN4控制。
基于智能视觉的割草机自动控制系统在L298N输入端和控制单元I/O引脚之间设置了光电隔离,避免了电动机停止和启动产生的脉冲对控制单元的影响。
2.3 定位单元
在基于智能视觉的割草机自动控制系统中定位单元可以准确的对割草机工作的路径进行控制,定位单元的主要目的是使控制单元确定割草机在工作时的位置。在基于智能视觉的割草机自动控制系统中定位单元的核心部件是增量型光电编码器,其分辨率为100。割草机在工作时车轮转动的圈数由后轮上编码器技术程序完成记录,编码器通过技术程序对割草机行走的路线进行控制。
基于智能视觉的割草机自动控制系统中的编码器可以输出Z零位信号和方波信号。当编码器转动一圈时,基于智能视觉的割草机自动控制系统中的每路信号输出N个脉冲,基于智能视觉的割草机自动控制系统可以通过脉冲计数表得到割草机的位置和圈数增量。基于智能视觉的割草机自动控制系统中编码器的相位关系是由旋转方向信号A、B之间反应的。将控制单元的比较模块和捕获模块中的输入端与编码器的输出信号进行连接,最后由基于智能视觉的割草机自动控制系统的软件进行技术和鉴相。
2.4 供电单元
基于智能视觉的割草机自动控制系统中逻辑控制部分和驱动部分中多种电压值是由L7806、L7805和LM317搭建的降压电路提供的。LM317中含有安全保护和过载保护等电路,满足基于智能视觉的割草机自动控制系统中驱动单元的电压需求。L7906和L7805满足基于智能视觉的割草机自动控制系统中逻辑部分电压的需求,供电单元可提供多种不同的电压值,满足割草机自动控制系统的需求。
综上所述,完善各硬件部分的创建方案,使其功能得到最大化实现,从而完成基于智能视觉的割草机自动控制系统硬件设计,为系统软件设计提供最优硬件环境。
3 软件设计
基于智能视觉的割草机自动控制系统的控制要求为:操作简单、割草机的转向灵活,具有降低强度的特点、控制系统中的执行结构要方便维护和简单。通过对割草机自动控制系统操作流程、人机界面进行优化,采用GC编程软件实现自动控制程序,完成基于智能视觉的割草机自动控制系统软件设计。具体描述如下:
基于智能视觉的割草机自动控制系统的设计特点要具有经济性、可靠性、灵活性和系统性,要便于操作者的控制和操作,利于运动状态的显示和参数的修改,并且要保证系统的可靠性和稳定性。基于智能视觉的割草机自动控制系统具有一次性复位的功能,可对各部件进行一次性复位。
3.1 自动控制系统操作流程设计
采用基于智能视觉的割草机自动控制系统的割草机进行工作时,其工作流程如下:按下割草机的启动键,基于智能视觉的割草机自动控制系统控制割草机中的设备回到初始的位置-切割刀保持静止并架在上升的状态,指示灯和刀架高度等信息显示在LCD显示屏上;可以根据工作环境的不同用手滑动数据对刀架的高度进行选择,方便割草机的工作。结束割草机刀架的调整工作后,按下割草机的切割刀启动按钮;切割机结束了当前的工作后,自动向前运动并进行切割工作,减少了劳动时间和劳动力,可在基于智能视觉的割草机自动控制系统中的LCD显示屏对切割速度进行调整,提高切割机的工作效率。给出割草机自动控制流程图如图6所示。

图6 自动控制软件实现流程图
为了方便基于智能视觉的割草机自动控制系统程序的标志,对执行元件和控制元件进行I/O地址的分配,表1为I/O地址的分配表。

表1 I/O地址分配表
3.2 人机界面设计
基于智能视觉的割草机自动控制系统在工作时采用的人机界面为MCGS,在实现“软按键”操作的同时完成了割草机工作的可视化。可以修改控制系统的人机界面结构以便适应不同的工作环境,使基于智能视觉的割草机自动控制系统操作更加简单。
3.3 自动控制程序的实现
根据基于智能视觉的割草机自动控制系统的I/O地址、程序设计和工作要求采用GC编程软件对系统的程序进行编程。GC编程软件具有操作简单和实用性好的特点,可以完成SFC和梯形图的编辑。图7为采用基于智能视觉的割草机自动控制系统割草控制的程序图。

图7 割草控制程序图
根据以上步骤,完成了基于智能视觉的割草机自动控制系统设计。
4 实验结果分析
为了验证所设计基于智能视觉的割草机自动控制系统的性能,本次实验环境为一块公共绿地草坪,草坪的土壤较为结实且没有坡度。区域切换行为能力、避障行为能力及边缘覆盖率是评估自动控制系统性能的三大重要指标。针对三项指标进行实验。
基于智能视觉的割草机自动控制系统根据智能视觉技术对割草区域的位置信息进行定位,为了验证基于智能视觉的割草机自动控制系统的区域切换行为能力和避障行为能力,在进行测试的割草区域内放置一些障碍物,图8为测试区域中的障碍物在三维空间的模型。图中每一层代表的是割草机工作的中间路径点,每一个方块都代表着割草机工作区域中的障碍物。

图8 障碍物三维空间模型
在割草机的工作区域中有一个灯柱为静态障碍物,分别采用传统该系统和改进系统对割草机的区域切换行为进行控制,使割草机的工作路径为沿着灌木丛的边缘前进,通过区域切换信号分析系统的区域切换行为能力,测得两种不同系统区域切换信号对比结果如图9所示。

图9 两种不同系统区域切换信号对比结果
由图9可知,图9(a)为传统系统区域切换信号,信号波谱较弱,平均区域切换信号保持在30 dB到60 dB之间。图9(b)为改进系统区域切换信号,信号波谱较强,平均区域切换信号保持在40 dB到100 dB之间。对比改进系统和传统系统的实验结果,改进系统的区域切换信号远远强于传统系统的区域切换信号,充分说明改进系统的区域切换行为能力更强,验证了改进系统的实用性。
分别将传统系统和改进系统装入割草机中,对割草机进行避障行为能力进行测试,在割草机的工作区域中存在6个障碍物,记录两种系统的避障路径,得到两种不同系统的避障避障路径对比结果如图10所示

图10 两种不同系统避障路径对比结果
观察图10可知,图10(a)为实际规划避障路径,图10(b)为传统系统避障路径,与实际规划避障路径相对比,传统系统的避障路径大大偏离了实际规划避障路径,路径总距离长,说明传统系统的避障行为能力较弱。图10(c)为改进系统避障路径,与实际避障路径近乎一致,且在障碍物拐点处选取的路径比实际避障路径拐点处路径短,总避障路径缩短,提高了系统的避障速率。改进系统控制的割草机,可以连续平稳的工作在景观物的边界,能够最大程度的靠近景观物的边缘工作,使割草机的工作范围完整的覆盖在景观物周围的区域。对比改进系统和传统系统的实验结果,充分说明改进系统的避障行为能力更强,验证了改进系统的有效性。
为了验证基于智能视觉的割草机自动控制系统的性能,需要对基于智能视觉的割草机自动控制系统进行测试,分别采用改进系统和基于PLC的割草机自动控制系统进行实验,通过跟踪轨迹得到割草机的工作路径,对比两种不同系统控制的割草机在障碍物边界旁区域的工作覆盖率,得到两种系统边缘覆盖率对比结果如图11所示。

图11 两种不同系统边缘覆盖率对比结果
分析图11可知,在一个有边界的工作区域内进行测试,采用传统系统控制的割草机在贴近边缘进行工作时,其边缘覆盖率曲线偏离实际边缘覆盖率曲线,无法实现对边界区域草坪的准确切割,边缘覆盖率较低。采用改进系统控制的割草机在贴近边缘进行工作时,其边缘覆盖率曲线与实际边缘覆盖率曲线基本保持一致。对比两种系统的实验结果可得,改进系统的边缘覆盖率更高,说明改进系统的控制精度高,对割草机的控制效果更好。
综合以上实验可得,所设计的基于智能视觉的割草机自动控制系统,其区域切换行为和避障行为能力强,便捷覆盖率高,对割草机的控制效果更好,具有一定的实用性和有效性。
5 结论
为解决传统割草机自动控制系统存在区域切换行为和避障行为能力差、边缘覆盖率低的问题,设计了一种基于智能视觉的割草机自动控制系统,主要对割草机的区域切换行为和避障行为能力、边缘覆盖率进行研究,通过在场地进行测试,验证了所设计的基于智能视觉的割草机自动控制系统区域切换行为和避障行为能力强,边缘覆盖率高,在割草机运行应用方面具有很大的实用性。但在控制速度方面仍有欠缺,未来将针对这一问题进行深入研究。
猜你喜欢
民间故事选刊·上(2022年4期)2022-04-17 11:24:45
民间故事选刊(2022年7期)2022-04-15 03:19:18
学生天地(2020年5期)2020-08-25 09:09:08
时代文学·上半月(2019年6期)2019-12-13 07:20:41
环球时报(2019-06-11)2019-06-11 06:17:18
电子测试(2018年10期)2018-06-26 05:53:36
汽车博览(2016年9期)2016-10-18 13:05:41
中国科技博览(2016年2期)2016-04-25 20:32:39
小学生导刊(2016年34期)2016-04-11 00:49:44
电测与仪表(2015年5期)2015-04-09 11:30:52
