基于ContextCapture实景建模及应用
2018-07-25 02:27:32李伟哲
西北水电 2018年3期
李伟哲
(陕西省水利电力勘测设计研究院测绘分院,西安 710002)
0 前 言
倾斜摄影是采用倾斜相机搭载在航空飞行器上获取地物信息的一种新型的航空摄影方法。倾斜摄影航拍与传统的垂直于地面的航空摄影方式不同,倾斜摄影技术一般情况下采用5个航拍镜头不同角度的组合设备,同时采集下、前、后、左、右5个方向航拍影像数据,配合航空飞行器的惯导系统获取具有较高的位置以及姿态数据,通过专门的影像数据处理软件进行空中三角测量(空三)处理,将所有拍摄的影像解算至统一的坐标系,通过在线分发,使用者可在线从不同的角度对数据进行浏览和量测,在信息快速获取方面优势明显。
航空器采用大疆创新公司的“悟”Inspire 1 Pro,其为专业的航拍飞行器,标配含有15 mm镜头,拥有三轴增稳云台、定点环绕等功能,设备采用的新一代大疆自己研制的Lightbridge高清视频无线传输技术。所有数码相机和无人机的飞控参数可以完全通过移动设备安装的软件来设置调整,同时其支持一键起飞。无人机除了拥有基于GPS在室外的导航系统外,还拥有一定条件下的视觉定位系统,可以在没有外部GPS信号的条件下实现其自主悬停,保证无人机的安全。
采集的影像数据处理软件采用Bentley公司的实景建模软件:Context Capture(原名Smart 3D Capture),可使用各种数码相机所拍摄的影像资料,为所需环境轻松生成具有高分辨率的实景三维模型。为使用者生成可用于导航的三维模型产品,而此实景三维模型拥有逼真的细节、清晰的边缘和精确的几何特性。可以按照自己的工作需要,采用任何尺寸或分辨率来创建所需三维模型。拥有数码照片纹理的、并且按照地理位置采用坐标系统定位的三维模型,这些模型产品都直接从影像资料中解算生产。
1 数据采集
测区是以龙首坝坝址为中心的矩形区域,区域长约500 m、宽500 m,共0.25 km2,相控点布设较密,其间距约为80 m,相控点采用RTK动态采集。无人机航拍采用DJI“悟” Inspire 1 Pro拍摄,挂载相机ZENMUSE X5,镜头焦距15 mm,传感器尺寸M4/3,有效像素1 600万。倾斜影像获取采用正射及前后左右倾斜30°共5个方向获取,测区设置航向重叠度80%,设置旁向重叠度70%,航拍相对航高大约200 m,地面分辨率约为5 cm,飞行架次5次,采集照片数量356张,共2.16 GB。经确认,影像完整,相控点清晰可见,可以使用,即完成外业的航测数据采集工作。
2 数据处理
通过新建工程,设置工程目录,填写必要的备注信息,即可成功创建一个工程。在空白工程的新区块导入影像数据后,如图1。
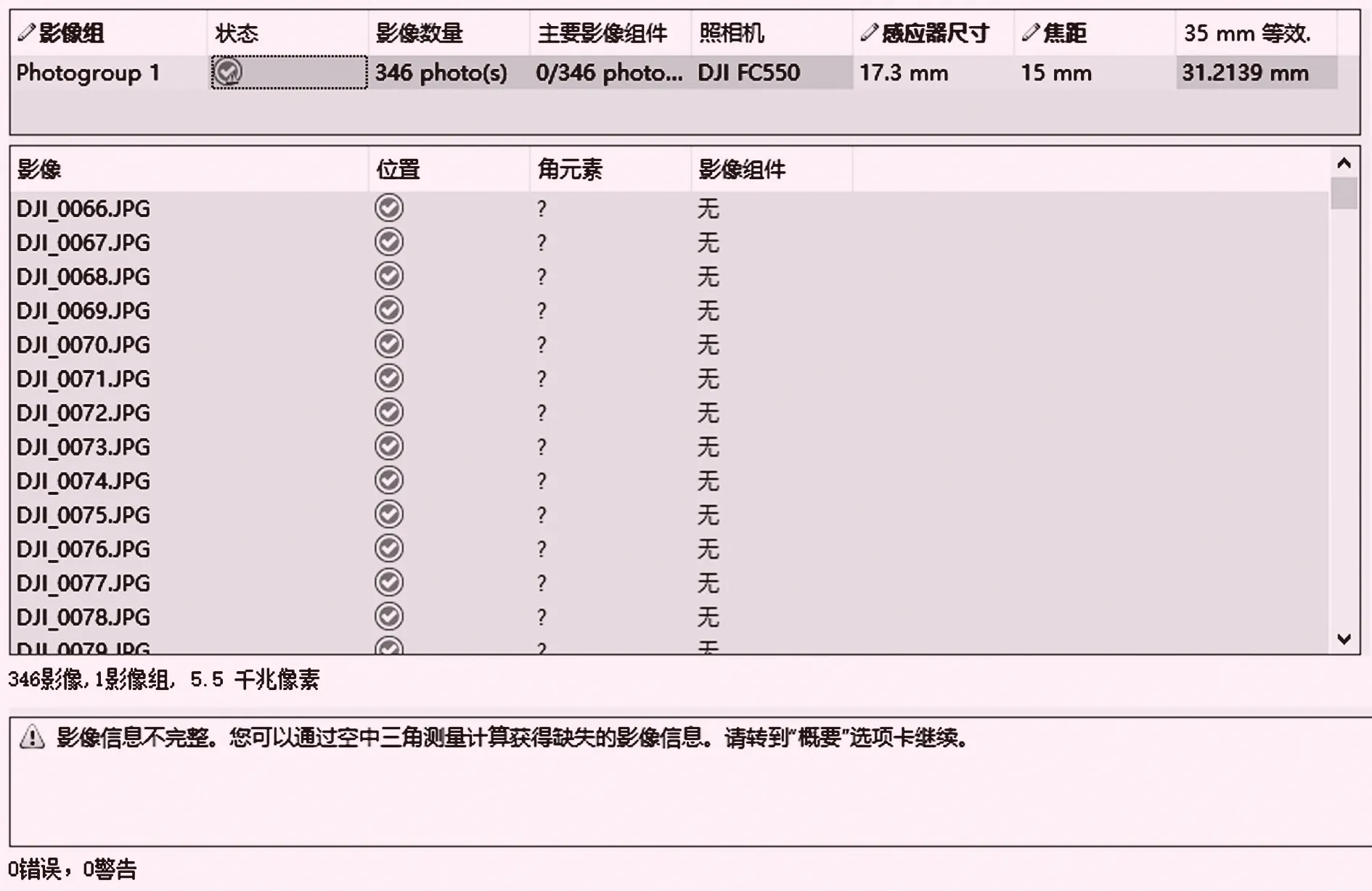
图1 ContextCapture导入影像信息界面图
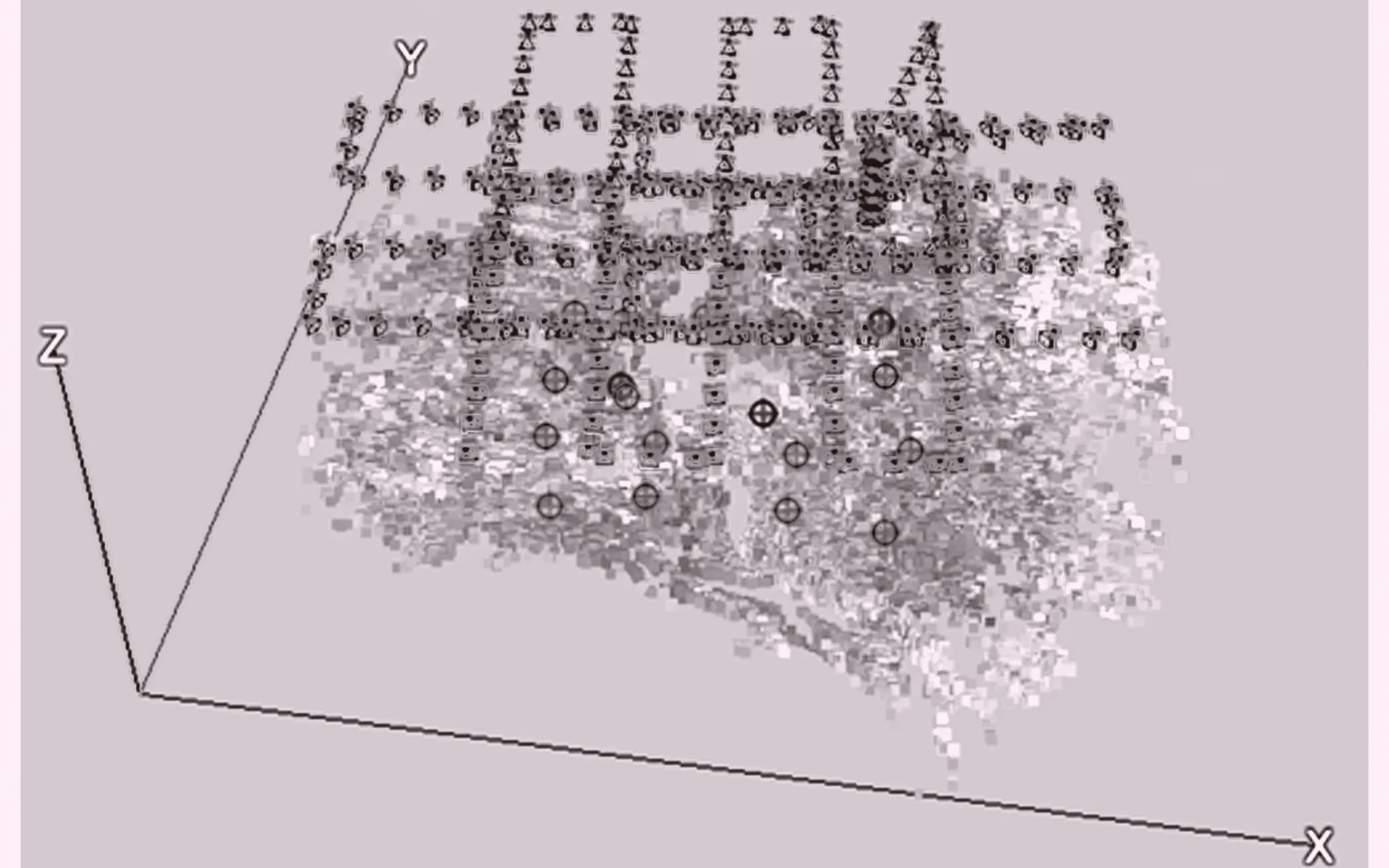
图2 航拍点及连接点概略3D视图
根据测区实际情况选择投影坐标系并导入相控点,对每个架次的影像进行刺点操作。无人机航拍时自带GPS定位系统,并将拍照时的概略位置信息实时写入了照片的EXIF信息内,故无需再次将位置数据导入其中。但是因为照片中并没有包含姿态数据,所以在导入照片以后,图1中提示“影像信息不完整”,需要通过第一步的空三处理来获得每一幅参与解算影像的精确位置信息及角元素信息。同时,输出了拥有连接点的概略3D视图模型,如图2,根据该连接点模型,查看空三结果是否正确,同时检查空三后相控点的精度结果,避免因模型分层、影像位置信息错误、匹配漂移、相控点刺点错误等原因使得空三结果不满足要求,造成后期的返工,确保处理工作顺利进行。
当完成所有解算影像的匹配,即具有了完整且精确的位置信息及角元素信息,相控点的匹配精度也满足要求,就是完成了初步空三解算[1]。
3 成果输出及应用
在完成初步空三解算基础上提交新的生产项目,就可以使用ContextCapture生产各种不同格式的产品成果,其中包括三维网格(如图3)、点云、正射影像等多种类型。可以导入各种各样软件进行浏览编辑,甚至直接参与勘察设计。

图3 ContextCapture生成三维网格模型图
3.1 3MX、S3C文件格式
这两种格式都是ContextCapture自带的三维模型数据格式,其中S3C格式是原软件未被Bentley收购之前叫做Smart3D时使用的模型格式,可以手动配置S3C索引文件来合并倾斜模型数据,但模型接边高程有较小的差值。3MX格式是可以在Bentley软件中使用的通用格式,可以在Bentley Microstation[2]进行模型参照,如图4,在Bentley Descartes中对模型进行一定的修改。基于Bentley公司强大的Microstation系列软件可以多种操作,可以完成多种设计,规划等工作。
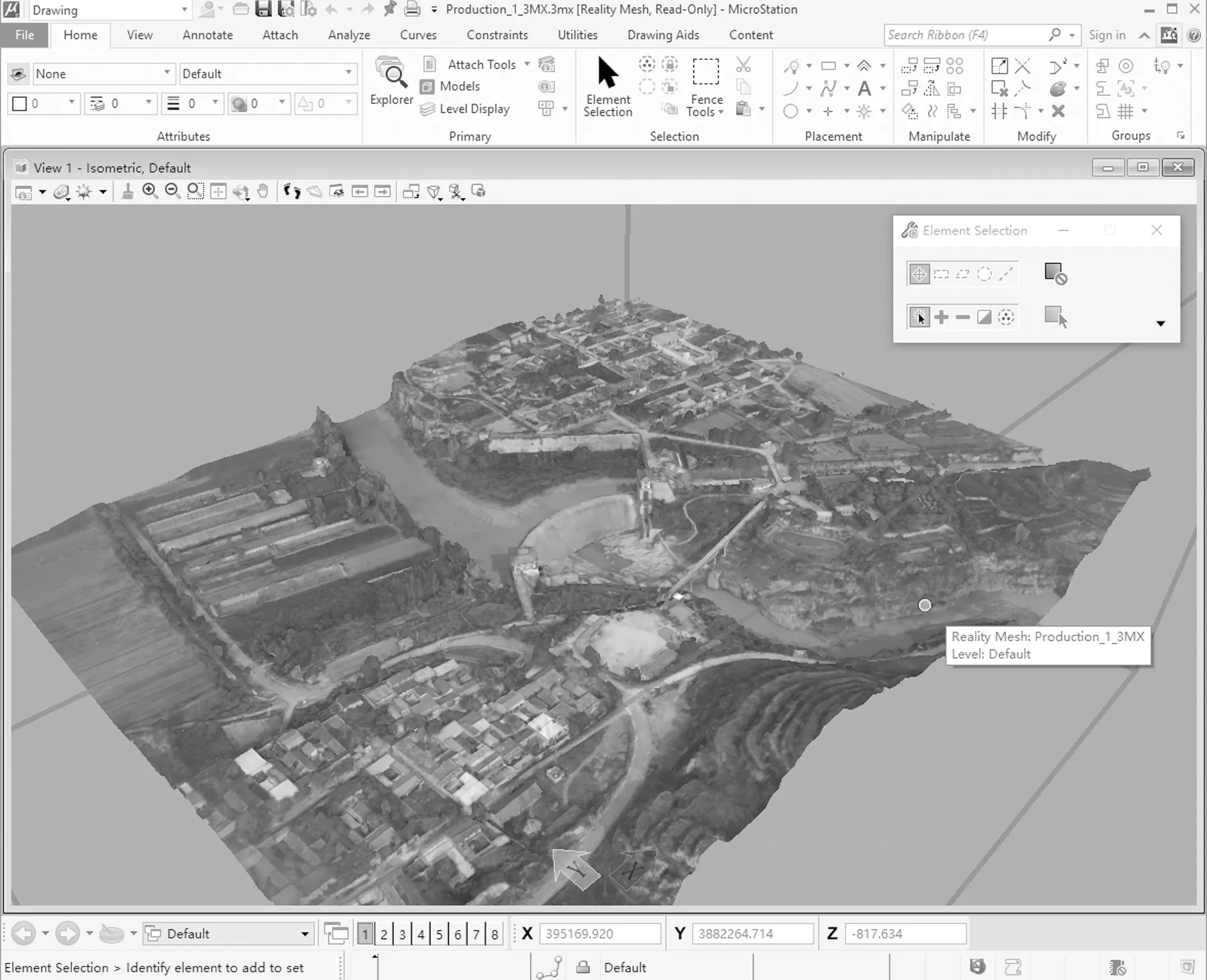
图4 3MX文件导入Microstation作为参照图
3.2 OSG等通用文件格式
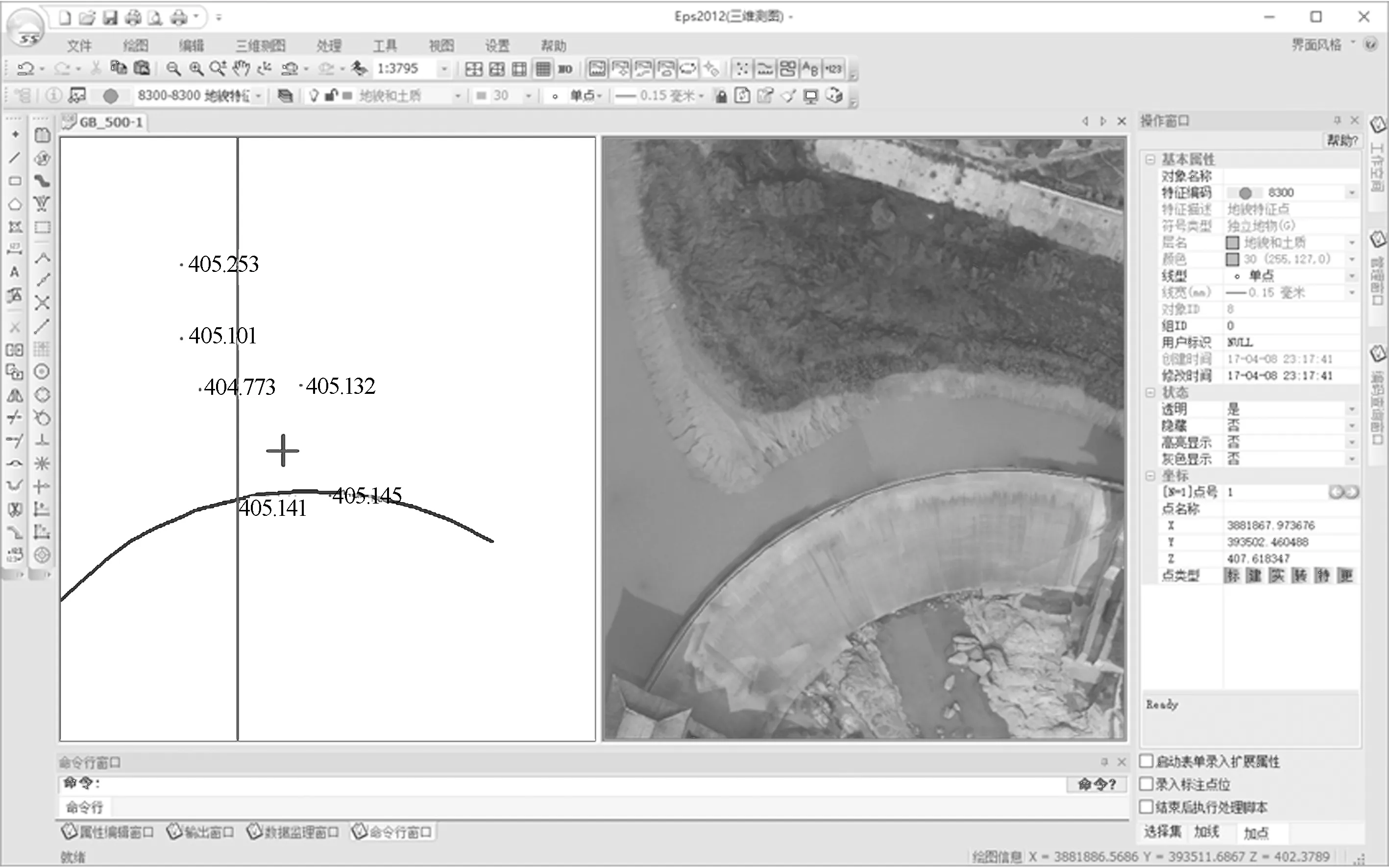
图5 在清华山维EPS中提取OSGB的元素信息图
OSG(OSGB)是目前应用最广且开源的通用文件格式[3],OSG支持骨骼动画、关键帧动画等各种流行的动画,它可以将3DStudio Max创建的模型数据转化成为OSG格式,导入数据到项目中进行操作,osgAnimation库里拥有大量的动画实用类。而在OSG相关的扩展中,最引人注意的是osgEarth、VPB和osgOcean,它们可以帮助开发者制作一个功能强大并且完善的三维地形数据展示系统,osgEarth的功能与GoogleEarth类似,且地形的生成效率可与GoogleEarth媲美。osgOcean是OSG的海洋扩展模块,其特点是可以非常逼真地仿真大面积水域,同时还可以在此基础上做二次开发,做更多的功能应用。
清华山维的EPS作为与南方CASS类似功能的软件,无需基于AutoCAD就可以独立使用,它可以导入OSGB格式的三维模型文件,如图5。通过软件内置的编辑功能可以提取三维模型中的点、线、面等元素信息[4],具有与南方CASS同样的绘图功能,但由于用户普及率较低,与用户的交互性相对较弱。由于EPS可以进行二次开发,不同格式和编码的转化、批量化操作等都可以通过脚本来完成[5]。
3.3 OBJ文件格式
OBJ文件格式是Wavefront软件公司为它的3D建模和动画软件“Advanced Visualizer”开发的一种标准三维模型文件数据格式,很适合用于3D软件模型之间的互相转换。OBJ文件是一种采用文本格式存储的数据文件,可以直接用写字板等的文本编辑软件打开进行查看和编辑修改[6]。
现在几乎所有著名的3D应用软件都支持对OBJ格式文件的读写,如:3D Studio Max、Autodesk Maya、Geomagic等。在建模软件中无法直接编辑其生产的产品,通过在这些软件中的编辑等操作,可以解决建模成果一些无法自动识别的误差及错误,可以通过ContextCapture中的“导入修饰模型”功能,将修改之后的模型导入工程文件,更新产品模型,生产更加符合要求、且更精细的模型产品。
3.4 STL文件格式
STL文件格式是最多快速原型系统所应用的数据标准文件类型。STL是采用三角网格来展现三维模型。STL文件格式简练,其只描述三维物体的几何位置信息,并不支持颜色及材质等数据信息,它是计算机图形学处理、数字几何处理、数字几何工业应用支持的最常见文件格式。
使用模块化的CATIA提供产品的风格和外型设计、机械设计、设备与系统工程、管理数字样机、机械加工、分析和模拟等。CATIA软件基于开放式可扩展的V5架构。
通过导入STL文件,不包含纹理信息,只需要将模型中影响因素剔除掉,替代了原有的加载数字线画图形式,可以在白膜的基础上设计加载建筑等BIM模型[7],如图6,使得设计工作更加准确、直观。

图6 STL文件与设计文件叠加在CATIA图
3.5 Google Earth KML文件格式
Google Earth KML是一种可以导入谷歌地球软件用于展示的三维模型格式,在谷歌地球软件应用广泛的前提下,它也可以作为浏览器快速地、方便地浏览三维模型,如图7。但是由于谷歌地球软件所使用高程数据即为SRTM3,精度90 m,所以在导入模型内插时,位置信息及高程信息并不准确,仅可以用作展示。Google Earth软件具有良好的开放性且多样化,高分辨率卫星影像数据不断累积,可以通过人工,提高模型精度,必然会改变未来勘察设计应用及作业模式,有力推动三维模型的发展应用[8]。

图7 Google Earth KML叠加在软件中展示图
3.6 正射影像、DSM
现在基本上空三解算软件都可以生产正射影像及DSM的产品,利用行业所熟知的ArcGIS导入该产品,在ArcScene中将正射影像与DSM叠加展示,形成可视的三维模型,也可以在其中提取所需要的元素信息[9],例如点、线、面、坡度等元素。也可以单独将正射影像导入CAD软件中,作为底图,提取影像上所需要的地物类信息,方便快捷。
3.7 三维点云
三维激光扫描技术又称之为实景复制技术,是测绘学领域继GNSS技术之后的再一次技术创新革命,具有效率高、精度高等的优势。三维激光扫描技术能扫描物体表面的三维模型点云数据,通过该技术获取的地形图,精度可靠、作业效率高。对于布设在岸坡陡峭且植被稀少地形中的水电枢纽等工程,其应用优势尤为明显[10]。
三维点云是其产品成果,在技术不断更新的情况下,ContextCapture已经支持点云与倾斜摄影配合的建模方法,具有更高的精度。编辑软件也是多种多样,诸如LP360、Terrasolid、CATIA、MicroStation、AutoCAD等,为点云的应用提供多样的方案。
4 实景建模存在问题的分析
虽然倾斜摄影技术基本上能够全面地展示实际情况,新的技术也逐渐得到开发及应用。但是该技术目前仍然存在一定的问题需要改进。
(1) 无人机航拍几乎成为倾斜影像数据采集的应用基础,灵活的作业方式、方便的采集手段、较高的采集精度都是无人机的优势。但是它的续航是数据采集效率的短板,续航能力成为其推广的制约条件,研发体积小、重量轻、容量大的能源载体迫在眉睫。
(2) 在后期计算时,航摄比例尺不一致、分辨率不统一、地表物体遮挡等原因导致数据存在一定的粗差,影响后期影像空三计算结果的精度。应加强对倾斜摄影大量冗余的合理利用,提高匹配精度、减少影响。
(3) 在倾斜摄影的产品生产中,某些区域存在模型缺失或产品失真等问题,无法完整清晰表达,是由影像数据不完整或地物遮挡所导致。需要通过再次航拍补测、人工相机拍摄或车载近景摄影测量将缺失数据补全。
(4) 激光雷达技术已经进入我们的视野,在无人机和车载技术的支持下,可以用它得到的点云数据将地表的植被、构筑物、移动物体等数据信息分类提取应用,且激光雷达技术拥有较高的数据精度,将其加入数据处理的原始数据中,与倾斜摄影相结合,可以提高空三计算的效率、三维模型数据精度、倾斜实际产品效果等。在进行修模作业时,大大减少了人工修改、构筑物分类、单体化分类的工作量。虽然目前采集成本较高,但是优势明显,必将得到广泛应用。
(5) 计算机技术成为模型产品生产的基础,单机的低效率同样制约模型的生产效率。近些年通过对计算机的硬件性能提升、软件算法的改进优化、增加多节点并行计算的功能,已经很大程度上改善的生产效率问题,将仅仅由计算机参与的生产时间压缩到较短的范围。
5 结 语
基于ContextCapture实景建模及应用技术,改变了传统的测绘行业作业方式,并且大幅提升了测绘作业效率,节约大量外业工作时间,同时协助设计工作从简单的平面画图为基础转变到了以三维模型为基础,大大增加了设计的直观性和三维模型的适用范围,可以满足不同的工程需要。倾斜摄影实景建模技术具有高效率、高还原度、以及快速获得海量地理信息数据的特点,倾斜摄影技术日趋成熟,不断发展,应用将更加广泛。三维技术不断向高科技和数字化的方向发展,未来必将成为测绘的核心技术,成为数字城市的数据基础。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
中外文摘(2021年10期)2021-05-31 12:10:40
华人时刊(2021年23期)2021-03-08 09:27:24
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
小学生优秀作文(低年级)(2018年6期)2018-05-19 01:54:27
作文通讯·高中版(2017年6期)2017-07-10 03:21:34
北方音乐(2017年4期)2017-05-04 03:40:09
陕西画报(2017年1期)2017-02-11 05:49:48