
高速铁路无砟轨道精调测量方法探索
2018-07-20 09:05:44吴维军朱洪涛曹娟华王志勇
铁道学报 2018年7期
吴维军, 朱洪涛, 曹娟华, 王志勇
(南昌大学 机电工程学院, 江西 南昌 330031)
轨道不平顺是指轨道的几何形状、尺寸和空间位置相对于其正常状态的偏离,包括轨向、高低、轨距、水平、轨距变化率及长波不平顺等。轨道不平顺是引起列车车辆产生振动的主要原因,是引起轮轨作用力增大的主要根源,也是直接限制列车行车速度的主要因素[1]。为满足高速铁路行车安全和舒适的要求,保证轨道的高平顺性、稳定性和可靠性,需要对轨道进行反复测量和精细调整。目前我国高速铁路精调测量主要有两种技术模式,以轨道测量仪为核心的绝对测量模式和以轨道检查仪为核心的相对测量模式。
在高速铁路无砟轨道建设阶段,因为需要控制轨道线形和三维坐标,以绝对测量模式为主,该模式以CPⅢ控制网为基准,以全站仪为核心。全站仪完成自由设站,进行逐枕测量得到轨枕处轨道中线及左右轨三维坐标,并依据设计线形计算得到横向偏差和高程偏差,以控制轨道绝对位置[2]。当数据采集完成后,依据前后测点的相对位置,计算轨道平顺性信息,主要是基于10、20 m 弦短波不平顺和固定300 、150 m弦校核的长波不平顺。虽然长短波的计算公式并不完全相同,但基本原理相同,都是基于前后测点的横垂向偏差计算得到[3]。绝对测量模式长波控制效果较好,得到普遍认可,但其短波控制能力的不足常为人们所忽视,依据文献[4],对于保证高速铁路±1 mm 的短波平顺性比较困难。
在高速铁路无砟轨道运营阶段,多采用相对测量模式进行轨道评价和维护,该模式以光纤陀螺仪为核心,通过惯性法测量轨道相对轨迹,同时辅以轨距、水平等传感器测量轨道内部几何状态。但轨道检查仪上的陀螺仪需要在较长时间内持续工作,而陀螺仪自身的漂移(主要包括偏差重复性、偏差稳定性、随机游走等)特性带来的测量误差,极有可能导致无法满足轨道平顺性检测的准确度要求,在实际使用中已经发现这一缺陷带来的问题,尤其在高速铁路轨道长波平顺性检测方面[5]。
1 两种测量模式测量不确定度分析
1.1 绝对测量短波计算模型与不确定度分析
高速铁路轨道精调维护中除了控制线路定位误差之外,还需要控制线路的相对点位误差,即通常意义下的轨道平顺性[6]。保证高速铁路无砟轨道的高平顺性,主要取决于相对点位误差。根据文献[4],绝对测量定位点(s)的测量误差依据来源包括与直接观测值l、β相关的站内各点的相对点位误差和与(xs,ys,βs)相关的设站起算误差,测量中误差为
( 1 )
式中:ρ=206 265″;l、β分别为测站内某点的观测距离、方位角;ml、mβ分别为全站仪测距、测角中误差;mβs、mxs、mys分别为全站仪设站的方向中误差和x、y坐标中误差,假设用于分析轨道平顺性的3个测点均属于同一测站内,设站起算误差相同,可忽略;Dxx、Dyy分别为x、y坐标的标准差。
由于全站仪在轨道道床上架设,测量方向与轨道纵向基本平行,同时,轨道位置偏差和不平顺指标均在轨道横断面内进行评价,与测距误差无关,故将式( 1 )简化为轨道法线方向的测量中误差
( 2 )
高低、轨向等不平顺的中点弦测模型为
( 3 )
式中:M(s)为轨道不平顺,mm;f(s)为轨道平面(垂面) 法向的轨道几何形位,mm;s为里程,m;L为测弦基长,m。其中,对于高低、轨向,L=10 m;对于正矢,L=20 m。
mc=
( 4 )
以mβ=0.5″,l=70 m,L=10 m计算,轨道平顺性测量中误差为0.318 mm。当其他条件都不变,mβ=1″,轨道平顺性测量中误差为0.589 mm。
关于测量仪器示值误差符合性评定的基本要求[7]
( 5 )
式中:U95为绝对测量示值误差的不确定度( 置信度95%) ,U95≈2mc;MPEV为被评定量的最大允许误差的绝对值,根据文献[8],轨向、高低平顺性控制指标为±2 mm。因此,可得到mc≤0.33 mm。
由此可知,1″精度等级绝对测量系统测定的轨向误差偏大,不能够满足高速铁路± 2 mm 的轨向调整要求;0.5″精度等级绝对测量系统,基本能满足要求,但考虑实际测量中的换站、环境变化、人为因素等,其安全裕度并不高,经常导致精调后TQI改善不明显,须进行多遍反复精调。
1.2 相对测量模式下长波计算模型与不确定度
根据文献[9],轨检仪的短弦中点矢距推算长弦中点矢距的模型为
( 6 )
式中:vk为短弦中点矢距;Vn为长弦中点矢距。
测量不确定度u为表征合理地赋予被测量之值的分散性,与测量结果相联系。当全部输入量xi彼此独立或不相关时,合成标准不确定度uc(y)为
( 7 )
v1,v2,…,vn,…,v2n-1可认为相互独立且其不确定度皆等于u(l),则
( 8 )
式中:u(xi)为分量的测量不确定度;u(L)为长弦中点矢距测量不确定度。
根据文献[10],轨检仪的准确度分为0、1 级两个等级,0 级轨检仪用于测量允许速度不大于350 km/h 的高速铁路在内的全部线路。0级轨检仪高低、轨向测量不确定度为0.7 mm,而正矢测量不确定度为1 mm,部分企业仪器出厂标准略高于行业标准,轨向、高低、正矢均为0.7 mm,计算结果见表1。
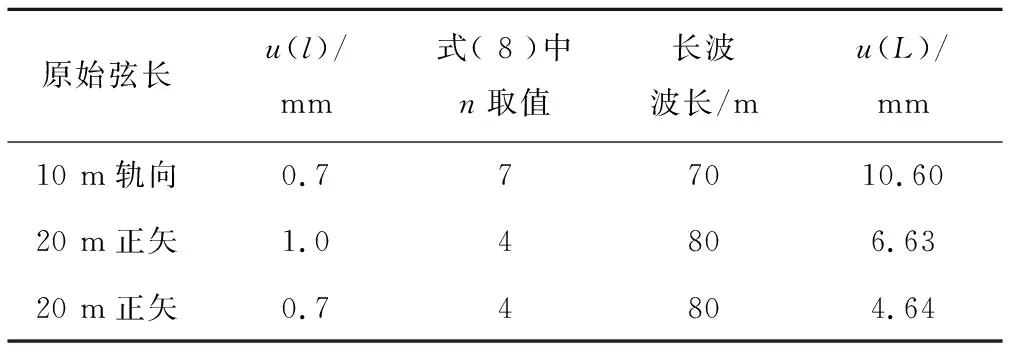
表1 长波不确定度计算结果
由此可知,相对测量模式长波测量不确定度约为4.64 mm,并不理想。江西日月明公司在0级轨检仪基础上推出了长波精测模式,即长波精测时需要往返测量轨道,在以小推大基础上进一步提高长波测量的精度,但即便如此,长波测量精度提高有限,效率降低明显。
2 轨道空间位置信号的变换与逆变换
认识到两种测量模式的不足,探索性地将两种方法结合使用,如先采用绝对测量控制轨道长波,再用相对测量控制轨道短波,反复交替使用,以更好地同时控制轨道长短波平顺性。虽然这种测量方式收到一定效果,但由于其方式上只是单纯的将两种方法叠加使用,所以周期和成本都有所增加。如何更加深刻地认识相对测量和绝对测量所采集到的轨道数据,并高效合理的使用,对轨道平顺性控制有积极意义。轨道波形是按空间分布的信号,在数学上可将绝对测量和相对测量所采集的数据信号定义为一种关于轨道空间位置变化的离散数字时域信号。傅里叶变换是一种分析信号的方法,它可分析信号的成分,也可用这些成分合成信号[11]。以下以离散傅里叶变换(DFT)和离散傅里叶逆变换(IDFT)为核心[12],进行轨道空间位置信号的处理和分析。
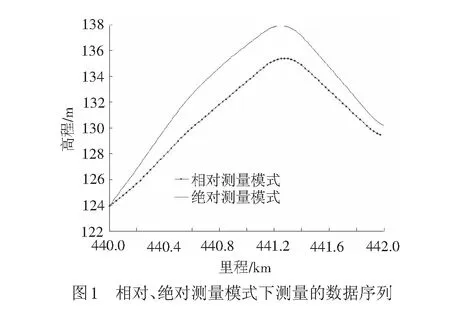
两种模式下分别测量轨道440~442 km范围内的高程数据:xr(n)为相对测量模式下得到的数据序列,检测时采用里程触发方式每步进0.125 m采样一次(n=1,2,…,Nr-1;Fsr=8,Nr=16 000)。xa(n)为绝对测量模式下测量的数据序列,每25 m采样一次(n=1,2,…,Na-1;Fsa=0.04,Na=80),见图1。相对测量模式采用陀螺仪测量轨道角度变化,最终计算得到轨道的相对轨迹,其起算值一般为0,为对比方便,其初值设为起始点的绝对高程。陀螺仪需要在较长时间内持续工作,由于自身的漂移造成的累积误差,导致其轨迹逐渐偏离其实际位置。
采用离散傅里叶变换(DFT),将信号从空间域变换到频域
k∈[0,N/2]
( 9 )
式中:X(k)为x(n)的傅里叶变换X(ejω)在频率区间[0,2π]上的N点等间隔采样,幅频特性曲线见图2,同时,信号的幅度谱和相位谱分别为
(10)
(11)
(12)
且当k=0 或k=N/2 时
(13)
式中:ReX[k]为X[k]实部;ImX[k]为X[k]虚部。


(14)
最终采用X′(k)进行离散傅里叶逆变换为
(15)
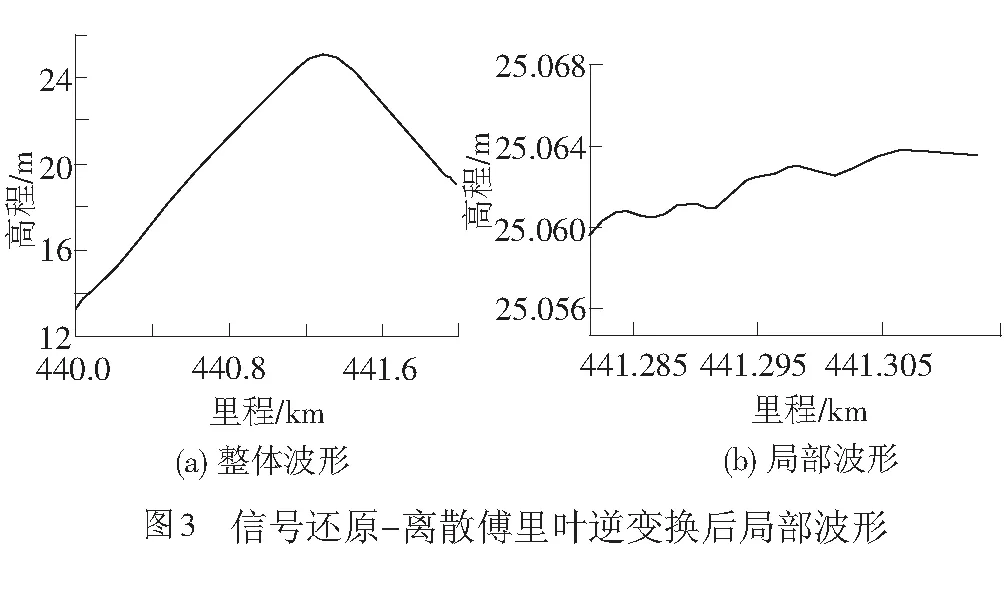
逆变换后波形见图3。
3 方法评价
通过离散采样得到轨道波形信号属于非周期性离散信号,而离散傅里叶变换是将要变换的数据序列默认为离散周期信号的主值序列,因此,图1给出的数据序列通过离散傅里叶变换提取其高频部分后再经逆变换得到的波形在首尾将出现较大震荡,正如方波分中出现非连续变化斜率。为解决此问题,应当在变换前将测量到的非周期性离散信号通过前后数据延拓的方式变为无斜率突变的周期离散信号,本节按此方法进行处理,Nr=20 000,Na=100,变换完成后再截取原里程范围内数据进行讨论。
3.1 两种模式下轨道空间位置信号的幅频分析
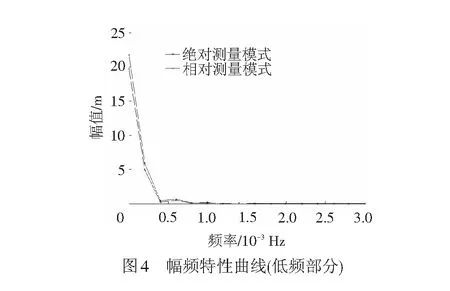
两种模式下数据信号的频谱特性,由于长短波幅值相关差较大,整体和细节无法在一幅图中同时显示,低频部分的幅值曲线见图4。两种数据波形都含有直流分量,分别为19.673、21.765 m(绝对测量模式在前,下同),第1组谐波分量幅值为5.001、5.932 m,其波长为2.5 km。第2组谐波分量幅值为0.240、 0.425 m,其波长为1.25 km。两种模式下分析的结果相差较大,认为绝对测量模式可信度较高,其绝对位置的偏差小于3 mm,而相对测量模式是由陀螺仪测量通过积分计算得到,自身漂移带来的误差不断累积,长波幅值误差较大,但测量2.5 km线路,其偏差小于1 m,可见陀螺仪精度之高。由图2可见,随着频率不断增大,两种模式下幅值偏差逐渐变小,与实际相符,当波长小于50 m,可认为相对测量模式可信度较高,选取频率分界点为0.018,其波长为55.55 m。
3.2 轨道绝对位置误差分析
虽然轨道精调的首要目标是轨道平顺性,但轨道绝对位置也同样需要控制,为验证频域分析方法得到轨道波形绝对位置的准确性,采用绝对测量模式按每5 m点对轨道进行数据采集,得到xa5(n)=[x(0),x(1),…,x(N-1)],N=400,将式(15)中对应5 m点的数据筛选出来与xa5(n)构成一列N个相互独立的观测对,若没有误差的影响,则观测对值之差应为0,即Δ(n)=xa5(n)-x′(n)的真值为0,采用白塞尔公式可计算出观测对值之差的中误差[13]为
(16)
式中:xa5(n)和x′(n)的测量相互独立,根据误差传播定律
(17)
依据高速铁路轨道绝对位置(中线横向偏差和左右轨高程偏差)10 mm的控制标准[14]和测量仪器示值误差符合性评定的基本要求(式( 5 )),ma不应大于1.67 mm,而由式(17)可知,轨道绝对位置中误差ma小于1.36 mm。因此,频域分析方法得到的轨道波形精度可以满足高速铁路轨道绝对位置±10 mm的控制要求。
3.3 轨道平顺性误差分析
高速铁路轨道精调作业标准中明确指出10 m弦短波平顺性控制标准为2 mm,而未对70 m长波平顺性控制标准进行明确规定[15]。根据经验,当70 m长波幅值达到7 mm时,动检车会出分(扣分),同时,依据文献[16],速度为250~350 km/h时,高低不平顺的最大敏感波长约为60~80 m,当其幅值增大,车体垂向加速度和轮重减载率线性增大;长波幅值达到7 mm 时,垂向加速度接近0.10g;长波幅值达到11 mm时,垂向加速度超过0.15g;长波幅值达到15mm时,垂向加速度超过0.20g。相应的幅值标准为:Ⅰ级为7 mm,Ⅱ级为10 mm,Ⅲ级为14 mm。因此,以长波7 mm为控制标准,短波2 mm为控制标准,讨论频域分析方法得到的轨道波形精度是否满足轨道平顺性控制要求。
3.4 效率分析
相对测量模式测量效率约4 km/h,绝对测量模式下将小车停稳并完成数据采集的效率约为8 s/点。新的测量模式(绝对测量每25 m采集一次数据,40 点/km,相对测量约15 min采集完1 km数据),与单独绝对测量模式(逐枕测量,约1 600 点/km)相比,减少了测量点的个数,节省测量时间约3 h/km。
4 结论
通过测量不确定度分析,认识到现有测量模式(绝对测量模式和相对测量模式)存在的不足,以离散傅里叶变换和逆变换为核心,对两种轨道空间位置信号及其处理方法进行了研究,并对该方法的有效性进行了分析和验证,结论如下:
(1) 绝对测量模式长波值得信赖,短波精度有限,对于保证高速铁路±1 mm 的短波平顺性比较困难。相对测量模式短波精度较高,可迅速消除TQI超限,提高轨道质量指数,但由于陀螺仪测量的累积误差导致长波测量精度有限,对高速铁路长波控制较为困难。
(2) 频域分析方法原理清晰,物理意义明确,与轨道平顺性波长直接相关,有利于针对性的提取特定波长的轨道平顺性信息,如10、20 m短波及70 m长波轨道不平顺。
(3) 通过频域分析方法得到轨道波形的频域信息,筛选谐波分量后通过离散傅里叶逆变换,可得到具有绝对位置准确,细节信息丰富的轨道波形,长短波平顺性精度达到要求。
(4) 新的测量模式在丰富测量信息,提高长短平顺性测量效果的同时,提高了测量的效率,但其数据计算量大,耗时长,增加了数据处理的难度,如何更好的在工程上推广和应用,还需要进行一步的研究和实践。
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:08
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
人民音乐(2016年1期)2016-11-07 10:02:42
时代风采(2016年12期)2016-07-21 15:07:45
时代风采(2016年10期)2016-07-21 15:07:34
林业与生态(2016年3期)2016-02-27 14:24:23
中国铁道科学(2015年4期)2015-06-21 06:46:06
中国光学(2015年1期)2015-06-06 18:30:20
建筑材料学报(2014年6期)2014-03-11 17:08:59
