旋翼无人机气流特征及大田施药作业研究进展
2018-07-19 16:12:58李继宇兰玉彬施叶茵
农业工程学报 2018年12期
李继宇,兰玉彬※,施叶茵
(1.国家精准农业航空施药技术国际联合研究中心,广州 510642;2.华南农业大学工程学院,广州 510642;3.内布拉斯加大学林肯分校生物系统工程系,林肯,美国,68583)
0 引 言
旋翼植保无人机一般是指具有一个或多个旋翼、能够垂直起降、具有一定载荷量和续航时间、在田间低空低速进行植保作业的无人驾驶飞行器。由于其具有作业效率高、雾滴穿透性强、无需专用起降机场、自动或自主飞行、机动性好等优点,近年来发展迅猛[1]。大田作物是重要的粮食作物,以水稻为例,在120个国家和地区广泛种植,全球一半以上的人口以稻米为主食[2]。中国是水稻生产大国,水稻面积约占全国谷物面积1/3,约占世界水稻面积21%;稻谷产量约占全国粮食总产量37%,约占世界稻谷产量34%,居世界第一位[3]。提高大田作物生产全程机械化水平是保障国家粮食安全、增强中国农业综合生产能力、增加农业收入和推进农业现代化的重要措施之一[4-5]。旋翼植保无人机在水田、高秆作物间进行植保和授粉作业以及应对爆发性病虫害等方面已经表现出突出的优势[6],近年来已经逐步在水稻、小麦、玉米、棉花等大田作物上展开应用。
1 旋翼植保无人机发展现状
旋翼植保无人机在大田展开施药与授粉作业目前主要在国内蓬勃展开,属于精准农业航空应用体系中一个重要环节[1]。国外农业航空发达国家比如美国主要以载人大型固定翼开展施药与授粉作业[7],其飞行参数与工作方式与小型旋翼无人机存在根本不同;美国多利用小型旋翼无人机进行农业遥感监测[8],近年也逐步开始对小型旋翼无人机喷施作业参数展开研究[9]。而日本雅马哈公司生产的油动力单旋翼无人直升机在日本国内开展田间作业已有多年[10],仍以人工操控模式为主,购机费高昂、培训时间长以及维护保养复杂繁琐[11],日本将其列为对中国禁售商品和技术保密[12],极少有渠道能获取相关研究资料。近期,以中国深圳大疆创新科技有限公司、广州极飞科技有限公司为代表的一批植保无人机公司已开始在日本、韩国开设子公司从事旋翼无人机植保作业[11,13]。其他国家如巴西、印度近年来也对旋翼无人机田间施药作业控制方法展开相关研究[14-15]。
随着国内外相关行业的推动与发展,旋翼植保无人机迅速成为当前学者研究的焦点。围绕旋翼植保无人机的施药作业系统、作业参数以及作业模式等方面做了大量研究[16-17],在机型、施药关键技术、施药配套装与技术等方面取得了一系列成果[18]。但仍然存在施药作业基础体系不够清晰、关键问题研究不够深入等问题,本文拟围绕气流作业特征探讨旋翼无人机作业基础体系的构建,同时对国内外旋翼植保无人机的研究进展和现状进行梳理和归纳,指出现有研究中存在的遗漏,提出基础研究方向,以期为国内相关科研机构、企业的深入研究提供参考。
2 旋翼无人机气流作业特征
旋翼的存在使无人机可以在田间垂直起降,旋翼旋转与空气的相互作用既为机体提供了必要升力,也同时产生了包裹机体并作用在作物冠层的旋翼气流。旋翼气流向下“包裹”住机体及附属喷洒装备,裹挟着喷洒出来的雾滴“拍击”在作物冠层上,与作物茎叶互相作用呈现出类似锥体的涡旋(水稻、小麦),这是旋翼无人机大田低空作业的典型特征,如图1所示。机体低速作业时机载喷施装备将药液转化为雾滴后脱离机体,喷洒目标是地面作物冠层,此时决定雾滴如何附着到作物冠层的重要因素就是旋翼气流,旋翼气流的体积大小决定了雾滴在空间的分布范围,旋翼气流作用在作物冠层上的接触区域即是喷施雾滴的靶标区域,决定了雾滴的沉积位置。在作业效果的角度来说,旋翼气流本质上是旋翼无人机大田作业体系中制约机体飞行参数以及决定地面作业效果的重要作业参数,对无人机田间作业体系研究具有基础意义。
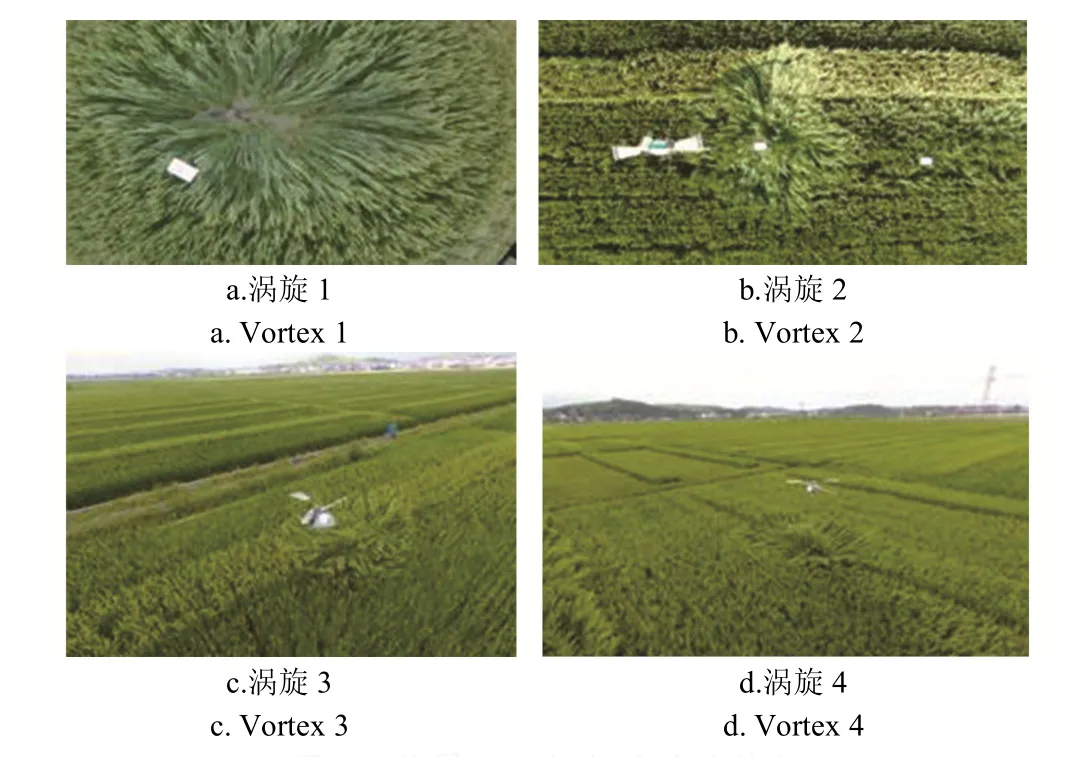
图1 旋翼无人机气流作业特征Fig.1 Performance characteristics in airflow of rotor UAV
3 旋翼无人机气流作业体系
旋翼植保无人机在大田作业归根到底就是要将农药转化为雾滴喷洒在植株上,达到植物保护的目的。其作业体系本质上是:①农药的装载搬运过程(主要与无人机本体载重性能相关);②农药转化为雾滴的过程(与机载喷施装备有关);③雾滴空间运动过程(主要由旋翼气流分布规律决定,并影响雾滴的沉积与飘移);④雾滴在作物上扩散过程(必须要考虑气流与作物的互作及雾滴在植株的附着性);⑤作业方法等的集合。⑤是对①-④过程综合的具体方法。上述过程关系如图2所示,围绕旋翼无人机气流作业特征,无人机本体及旋翼提供了农药载运所需的装置与升力,旋翼产生的气流流场必然受到包裹于其中的机体及喷施装备影响,进而决定了雾滴在空间中的运动规律,最终气流与作物之间的互相作用体现了雾滴的扩散与沉积效果,并用具体施药作业方法实现。
3.1 农药装载搬运研究
农药的装载与搬运主要体现在无人机机体、药箱及其技术。
3.1.1机体
无人机机体主要包括机架结构、旋翼结构(桨、电机或发动机)和能源动力(传动、电池或燃料)。旋翼无人机机体传统构造是单旋翼直升机结构,韩建达等设计了一种手动操控喷药和自动导航喷药相结合、施药精准度高的施药无人直升机,通过摄像机实时采集反馈作物数据,并通过控制系统控制喷洒装置施药时间和快慢,从而实现施药准确[19];张逊等[20]设计的直升机机载电气系统包括飞行控制器,GPS,航向计,微型惯性测量组件,测控链路,舵机控制器,供电系统。机体框架中部装有由药箱、液泵、喷杆及喷头组成的施药装置。
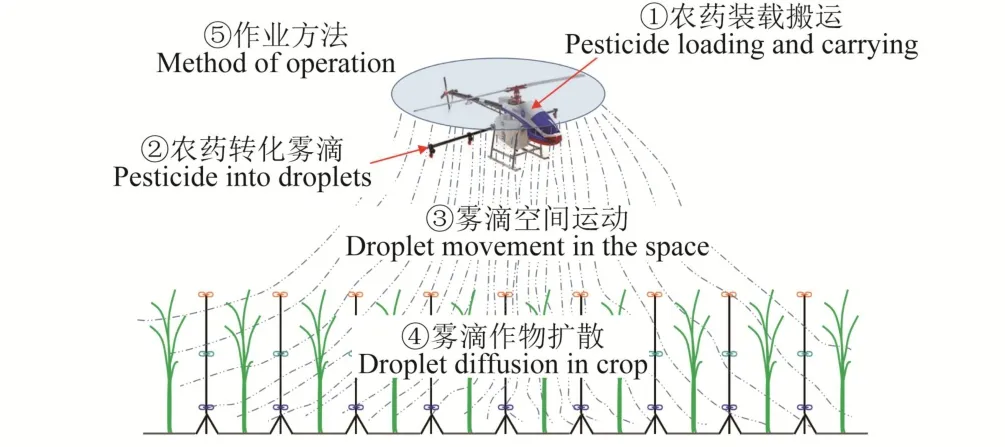
图2 旋翼无人机作业体系Fig.2 Rotor UAV operating system
而多旋翼结构中目前最常见的是四旋翼无人机,其结构较传统直升机简单,设计门槛低。X4Z四旋翼农用植保无人机采用独创的倾角合力升举式设计,该设计有效地降低了多旋翼农用植保无人机在农田飞防过程中的机械晃动问题,提高了农用无人机在高荷载作业情况下的飞行稳定性[21]。张文星[22]用2对4个旋翼组成内外2套“共杆反桨”,且4个旋翼弧面分布,镜像对称,旋翼的转轴线共面,用1对2个旋翼组成一套“共轴反浆”,再通过几根碳纤维管和连接固定件,构成1个左右镜像对称、前后不对称的六旋翼无人机结构;顾文杰等[23]设计了一种适合中小田块的六旋翼农药喷洒无人机。采用Solidworks软件进行建模,确定机体中央仓、机臂折叠件和喷洒装置脚架安装结构,机臂整体实现上翘以增强无人机抗风能力。苑进等采用发动机驱动的横列式反转双旋翼,采用2对电动小旋翼,提供无人机水平方向姿态调整和作业飞行所需的推力,具有结构和控制原理简单的特点[24];李俊杰[25]提供一种多旋翼农用无人机螺旋桨装置,包括盖体、锁定部件、若干机臂和若干连杆;万丹[26]公开了一种双并联舵机结构,能分摊缓解1个舵机受到的扭矩,保证了植保无人机的控制及传动平稳。
李继宇等[27-30]提出了对称和非对称布局多旋翼无人机动态受力中心位置的检测方法;以及定载荷与动载荷的电动力无人机的分段能耗评价方法,周志艳等与广州天翔航空科技有限公司一起提出了一种折叠快拆式多旋翼无人飞行器,方便田间地头运载[31];海南崇航无人机服务有限公司黎勇创新地提出一种无时间限制、地面供电供药植保无人机[32]。
上述研究涵盖了各类旋翼无人机机体,但对于无人机机体的载质量需求大的基本特点关注不多。无人机机体是一个很复杂的系统,旋翼结构同时承担着机体的载质量能力和姿态控制需求,不同的本体架构、旋翼配置和能源供给会带来不同的系统表现,特别是系统在机体载质量需求与机体控制需求的资源分配比例上,会涉及到桨效、螺距、桨速、能量密度、气动布局等几乎所有机体部件参数。而不同于普通航拍、遥感和测绘等行业无人机,为提高作业效率,植保无人机当然需要装载搬运尽可能多的农药,对机体系统载质量资源的分配要求更高。现阶段中国各植保无人机企业在机体研发、制造与组装上已有较丰富经验,表1为目前市场上具有代表性的4种旋翼无人机机体载质量参数[33-36]。在大田作业基础体系中,植保无人机更加关注的是最大起飞质量、满载悬停时间以及标准载荷等更能体现其搬运农药能力的参数。
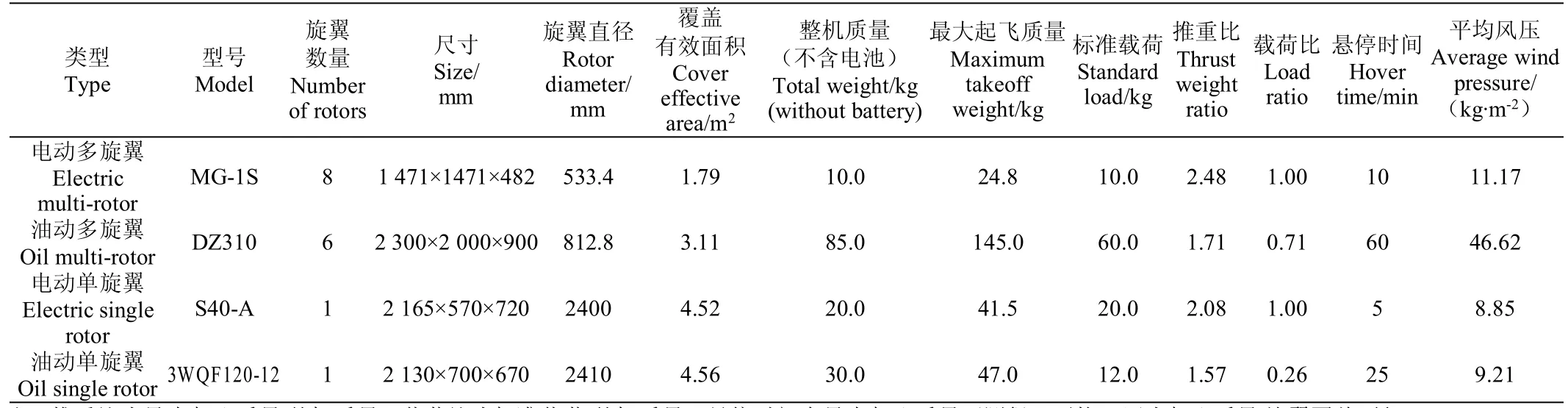
表1 四种旋翼无人机机体参数Table 1 Four types of rotor UAV body parameters
以表1中参数为例,从载质量的绝对参数最大起飞质量和悬停时间来看,油机表现好于同类型电机;从相对参数推重比和载荷比来看,电机则相比油机有优势。从旋翼作业有效面积来看,单旋翼大于多旋翼;而从旋翼施加于空气的作用力形成的有效面积风压压强来看,多旋翼优于单旋翼。上述指标哪些对植保无人机更重要?植保无人机机体的设计是以发展绝对载质量能力为主还是强调相对载质量能力?是有效面积重要还是风压压强更重要?回答这些问题需要展开大量基础研究。在国防科技、航模竞技中,能够衡量机体载质量能力、控制厄余的参数推重比、载荷比、能耗等已经具有相当的研究成果,而针对植保无人机大载质量特点的机体资源配置研究尚未见报道。2017年由农业部南京农业机械化研究所主持的国家重点研发计划“农用航空作业关键技术研究与装备研发/2017YFD0701000”已经开始对旋翼无人机的“大载荷机体”和“能源载荷匹配”技术立项研究[37]。
3.1.2药箱
药箱是无人机机体上装载农药的容器,围绕药箱构造与防振荡技术,近年来不少学者开展了研究工作。王大伟对无人机喷洒过程中药箱进行了分析和建模,推导出长方体药箱质量和转动惯量随时间变化的公式,进一步得到了植保无人机精确的时变性动力学模型[38];姜锐等[39-40]提出一种双气压式液量监测装置的设计方案,包括双气压式液位监测、药箱液面震荡干扰滤波、机身倾斜干扰校正以及液位-液量换算模型等;何勇等[41-43]分别都提出了一种减轻药液倾荡的农用植保无人机药箱。类似于无人机机体研究,药箱作为机载装备体积最大的部位,其形状与大小影响到整个机体的载质量性能与控制性能,甚至会影响旋翼气流的分布特性。围绕无人机载质量性能与控制性能的平衡点,研究设计与机体一体化的药箱将会是未来旋翼无人机发展的一个方向。
3.2 . 农药转化雾滴研究
农药转化成雾滴依靠机载喷雾系统完成,主要考虑2个问题:雾滴的初始物理状态(大小、角度、均匀度、是否携带荷电)和雾滴的初始运动状态(流量、流速)。
3.2.1 雾滴初始物理状态
兰玉彬关注气流-喷头作用时影响雾滴4种特性的相关性,有助于对喷头选择漂移还原剂来满足特定应用下漂移缓解标准[44];茹煜等[45-48]就航空静电喷雾过程中雾滴的雾化过程、荷电过程、输运过程和沉积过程进行了基础理论分析和测试研究;国家农业信息化工程技术研究中心王继环等通过在一种现有喷头TXVK-6的基础上进行静电喷雾系统的搭建,对静电喷雾的雾化过程、充电过程以及无静电状态下沉积过程进行理论分析[49];文晟等[50]基于旋流雾化的原理并采用模块化方法,提出了一种超低容量旋流喷嘴结构。刘武兰等提出了航空静电喷雾技术应用在植保无人机飞行航空作业上所面临的难题和未来可能的发展趋势和解决方案[51];而廉琦[52]则设计了无人机静电喷雾系统的组成方案,对雾滴的荷电机理进行研究,确定了充电电极的荷电方式;确定了静电喷头类型并建立该静电喷头的荷电量数学模型;找出影响荷电量的关键因素进行试验优化;田源等[53]设计了基于无人机的静电离心雾化装置,在喷头部分采用了将静电雾化和离心雾化结合的方法,进一步细化雾滴;孙竹等[54]使用电机、喷嘴、离心雾化转盘,并设计以单片机和外围电路构成的嵌入式控制系统,根据无人机当前的飞行高度调整雾化转盘的转速,达到改变雾滴尺寸的目的;周晴晴通过对比液力喷嘴和离心喷嘴的雾化原理,选择窄雾滴谱的离心喷嘴作为研究对象。采用变频器调整电机转速,采用回水阀稳定喷洒液体的流量和压力,设计并搭建了离心雾化试验台。试验研究了喷嘴的雾化形状[55];高圆圆[56]运用雾滴粒径测试系统对Af-811小型无人机雾化系统的性能参数进行了初步研究。雾滴物理初始状态研究以喷嘴结构和静电喷雾系统为主。
3.2.2 雾滴初始运动状态
Huang等[57]开发了一个低容量喷雾系统,配合全自主的无人机应用在特殊小区域指定作物农田中,取得了不错的效果;Giles等[58]在无人机上针对喷头与静电释放处的位置关系进行研究,并安装商业喷施系统在加利福尼亚价值较高作物上作业,获得较好效果;武志明等[59]提供了一种植保无人机喷头、雷达自动调节装置及其使用方法;于海涛等[60]设计了植保无人机喷雾性能综合实验台,可以模拟农业植保无人机工作状态下,对喷头的压力、流量、雾锥角、喷幅、雾滴粒径、雾滴沉积量、雾滴分布规律、雾滴分布变异系数等重要参数的测试;徐兴等[61]提出一种用于多旋翼无人施药机的喷头增稳装置及方法用于雾滴运动测量,李继宇等[62]发明一种无人机作业飞行器用的伸缩装置调节喷头位置,改变雾滴初始运动状态;王飞等[63]对植保无人机的喷洒方向进行控制进而影响雾滴的运动状态。
3.2.3小结
从上述内容可看出,机载喷雾系统作为无人机系统中除了机体外唯一可以有效控制的部位,已经成了旋翼无人机系统研究的热点,特别是静电喷雾方式吸引了很多科研工作者的注意力,也已经取得了丰硕的成果。然而,目前几乎所有机载喷雾系统都处于旋翼气流的包裹中,针对旋翼无人机的特征:旋翼气流对雾滴的物理和运动状态所产生的影响,却鲜有提及。宋坚利等[64]公开了一种单旋翼植保无人机用农药喷洒系统,根据主旋翼下旋气流场边界来确定扇形雾喷头的安装位置,能够有效避免无人机主旋翼和尾翼对喷头雾化产生的喷雾扇面的卷扬影响,定向沉积到靶标上,大大提高了农药利用率;王森[65]则进行了单旋翼植保无人机垂直风场的研究,然后针对无人机风场研究结论,选用一种航空专用喷头,并对其进行了试验室内的特性试验研究。上述两位学者都注意到了旋翼气流对雾滴运动状态的影响,指引出未来研究需要注意的方向。值得指出的是,除工程应用研究外,雾滴在旋翼气流环境下与喷头或喷嘴脱离的过程中,其物理与运动状态的变化机理也是需要探究的基础科学问题。
3.3 雾滴空间运动研究
传统固定翼飞机喷洒农药时主要依靠雾滴自然沉降达到靶标区域[66]。区别于此,旋翼无人机大田植保作业时总是保持低空低速飞行,是为了利用旋翼气流对雾滴的的“风送”性能,从而提高雾滴对靶标的穿透性和均匀性[67]。旋翼气流直接决定了雾滴在空间中的运动规律,不仅是影响雾滴的风送对靶沉积量的主要因素,也是雾滴在空间脱靶产生漂移的主要原因。
3.3.1 旋翼气流
张文星设计了“桨叶弧面分布六旋翼的农用植保无人机”,这种结构相对于市面上的“桨叶平面分布中心对称结构的六旋翼无人机”,有效地降低了下洗气流的流速,增大了下洗气流的面积[68];另外 “共杆反桨”和“共轴反浆”通过几根碳纤维管和连接固定件,“杆”垂直“轴”。下洗气流的方向,就是弧面的外向法线方向;梁建等[69-70]提出移动式无人机农用喷洒作业风场测试设备及测试方法;并在对水稻品质影响研究中设计了无人旋翼机喷洒作业风场与测试方法,研究无人旋翼机旋翼下洗气流场;胡炼等[71]为了实现田间多点、多风向、可移动、实时采集无人直升机旋翼气流在作物冠层所形成的风场相关参数,设计了一种风场无线传感器网络测量系统,李继宇等[72-74]提出2种不同的适用于无人机的立体风场测量系统及其使用方法和一种零点可调的动压式风速测量装置;兰玉彬等[75]模拟无人机室外飞行环境提出一种带检测功能的无人机测试风房;李诚龙[76]结合旋翼动力学模型给出多旋翼无人机在高空飞行风场环境下的仿真建模方法,在半实物仿真环境基础上,结合对飞行试验过程中的数据分析,讨论了飞行过程中海拔高度变化引起的空气密度改变对旋翼气动特性的影响;杨璐鸿[77]对纵列式六旋翼大载荷无人机气动特性数值进行了模拟及优化研究;广东华南农业航空工程研究院提出了一种检测旋翼无人机气动特性的装置及检测方法[78]。综上,学者主要对机体气动特性和旋翼气流的检测方法提出了各自见解。
3.3.2 对靶沉积量
Lan等[79]通过对雾滴、沉积量、顺风漂移量和液滴在棉花冠层光谱特征4种因素,收集水敏纸和聚酯薄膜卡的测量,分析出沉积量、雾滴大小、雾滴覆盖率,漂移距离和处理手段或制剂高度相关;廖娟等[80]研究不同因素条件下的雾滴分布情况,为航空喷施作业时选择相对合适的喷嘴型号、喷雾压力、喷施角度、作业高度、作业速度、药剂配方及药剂浓度的选择提供参考,提出了作物航空植保技术规程中作业参数的优选及评价方法;中国农业大学张京等用红外热像仪与无人机联用测试喷雾前、后作物冠层温度,通过温度变化率反映雾滴在水稻冠层的沉积效果。以雾滴沉积量与冠层温度变化率为评价指标得到的结果一致,红外热成像技术可以准确反映雾滴在水稻上的沉积规律[81];王昌陵则提出了一种无人机施药雾滴空间质量平衡测试试验方法,并且使用该方法对3种无人机进行了田间实际试验研究,可以有效获得准确飞行速度和高度下无人机施药雾滴空间分布情况和下旋气流场分布情况[82-83];北京市植物保护站技术人员在顺义科技展示基地,针对3种旋翼无人机,开展了最佳作业参数、相应有效喷幅、作业效率的测定,以及适用农药剂型比较[84];许童羽等[85]发现植保无人机低空喷雾在水稻垂直方向的雾滴覆盖率存在显著差异,有效喷幅内旋翼下方区域的雾滴覆盖效果最好,而远离旋翼的位置,雾滴覆盖率较差。上述研究显示,通过地面沉积量来间接验证雾滴空间运动情况是目前使用最多的一种手段。
3.3.3 脱靶飘移
秦维彩等[86]为了找出多旋翼无人机喷洒农药时影响农药沉积的因素及其影响程度,提高雾滴在靶标上的沉积水平,在单因素试验的基础上,采用Box-Benhnken的中心组合试验设计理论对施药机具的喷雾参数进行研究;薛新宇则研究了航空喷洒雾滴沉降飘移规律、农药植株沉降附着基本特性、低量高浓度喷洒剂型对水稻安全性;进行室内及田间喷洒试验验证[87];陈盛德等[88-92]以HY-B-10L型单旋翼电动无人机搭载北斗定位系统UB351绘制作业轨迹,以质量分数为5‰的丽春红2R水溶液模拟生长调节剂喷施沉积情况,以图像处理软件DepositScan、对比人工、有效喷幅的角度来分析靶区和非靶区的雾滴沉积参数得出雾滴的沉积分布与飘移结果,兰玉彬等[93]提出一种农用无人机喷雾防漂移装置及其使用方法;中国农业大学王潇楠等研究油动单旋翼植保无人机在精准作业参数(速度、高度)条件下的雾滴飘移分布特性,建立了雾滴飘移收集测试平台,分别用雾滴飘移测试框架、等动量雾滴收集装置和培养皿收集3WQF80-10型油动单旋翼植保无人机在作业时空中及地面飘移的雾滴[94-95]。
3.3.4小结
国内外学者聚焦旋翼气流及靶标沉积与飘移问题已经展开了大量研究工作,增加雾滴沉积,减小雾滴漂移。但大部分方法都是通过改变机载喷施参数,然后观察喷施效果的间接手段来描述雾滴空间运动状态,能够知道雾滴沉积了多少和飘移了多少,但并不知道其本质原因,缺乏对旋翼气流具体形态的直接分析,缺乏能够指导施药实践的雾滴运动模型,2016年由华南农业大学主持的国家重点研发计划“地面与航空高工效施药技术及智能化装备/2016YFD0200700”中涉及到旋翼气流及雾滴空间运动状态相关研究[96];在中国农业工程学会2017年学术年会农业航空分会场上,也有该项目参与单位做了相关研究进展报告[97],期待进一步深入研究内容见诸报道。
另旋翼无人机作业系统从旋翼气流特征、雾滴运动目的来看,更类似于一个“会飞的”风送式喷雾系统。除了喷施角度、机体位置、喷施量[98]等参数不同外,最大的区别在于该系统的风送气流来源于旋翼对空气的反作用力,而该作用力决定了无人机的飞行高度与飞行速度。故借鉴风送式喷雾系统的研究成果,深入研究无人机的飞行参数(高度、速度等)与雾滴空间运动状态的关系也是未来旋翼无人机作业体系的重要研究方向。
3.4 雾滴作物扩散研究
雾滴经旋翼气流“风送”的最终目的地是作物,大田不同作物植株对旋翼气流的作用表现不一,如水稻、小麦等禾本科茎叶小穗形态适合风媒,会迎风飘扬[99]。此时雾滴扩散需要考虑2个问题,一是气流与作物植株之间的互作关系,二是雾滴在气流下对作物植株的附着能力。
3.4.1 气流与作物互作研究
李继宇等[100-101]提出旋翼所产生气流到达作物冠层后形成的风场也有较大差异,对应的风速、风向和风场宽度等参数对作业效果均不同,单轴单旋翼与圆形多轴多旋翼的旋翼气流在水稻冠层形成的风场分布就各不相同,冠层平面风场的覆盖宽度、风场内各方向风速的大小以及风场的分布规律将会直接影响到农用无人机田间作业效果[102],还对旋翼无人机风场下花粉在水稻冠层处的分布规律做了总结与研究[103];徐文彬等[104-105]研究大载荷植保无人直升机近地飞行时下洗流场的特征,建立了FR-200植保无人机三维实体模型,并对计算区域进行网格划分,采用SSTk-ω湍流模型计算了大载荷植保无人直升机近地飞行流场,植株冠层处风场随着飞行高度的降低,风场宽度增加,获得较佳的飞行高度为H=4 m。王森[106]则试验研究作物不同冠层高度的沉积率变化,垂直风场及飞行气流对雾滴在冠层的穿透性沉积影响;李中秋等[107]分析了气流作用下植株受力及气力作用层下层的花粉运动情况,对气流不同作用位置产生的弯曲变形进行了对比分析,从花粉的分散密度、水平分布、竖直分布3个方面评价气流作用位置对花粉分布的影响效果。
3.4.2 雾滴附着植株研究
王景旭等[108]探讨在温室环境中用气流辅助方式喷施农药时,施药对象(靶标)周围的流场对雾滴飞行轨迹及雾滴附着行为产生的影响;王志强等[109]结合气力雾化、风送和静电的弥雾技术增强了雾化效果,提高了雾滴的均匀性和吸附性;董祥[110]对雾滴撞击植物叶面过程试验测试及仿真的研究增加农药喷雾液滴在植物叶面上的附着率,减少雾滴的滚动或溅射,使之在叶面上稳定沉积;张铁等[111]发现风幕式施药技术能够有效提高雾滴在大豆冠层中的穿透性和分布均匀性,增加雾滴在植株各冠层叶片背面的附着率,但雾滴的地面流失率相对不使用风幕有所增加。
雾滴附着参数快速获取方面,张瑞瑞等[112-113]基于变介电常数电容器原理设计雾滴沉积传感器及检测系统,由此实现对航空施药中雾滴地面沉积量的快速获取;蔡坤等[114]提供一种农药雾滴沉积与蒸发检测装置及方法,当雾滴沉积到共平面插指式电容器表面时,电容值变大,而当雾滴蒸发时,电容值逐渐变小恢复至初始状态值;李继宇等发明了一种田间颗粒物作业参数实时检测装置及其方法[115];吴亚垒等[116]提出一种基于驻波率原理的叉指型雾滴采集极板结构。应用三维电磁仿真软件HFSS对系统进行电磁仿真结果表明,叉指型极板内部出现了静电屏蔽,极板间通过雾滴能够实现电磁耦合,可用于雾滴沉积量检测,系统灵敏程度将随着极板间距的增大而减小。
薛新宇等结合国家863项目“水田超低空低量施药技术研究与装备创制”研究内容,对9种水稻常规农药及剂型对表面润湿展布性能展开研究[87];周晓欣[117]选用不同种类喷雾助剂进而探索筛选出一种能够抗蒸发,抗飘移,润湿性好的飞防专用喷雾助剂,从而减少蒸发飘移产生的药害问题;杨帅[118]则分别使用WSZ-2410型、VH-2型、EH-3型及TXC-8-5-0-1型无人机喷洒雾滴蒸发问题进行了探索。
3.4.3小结
相对于农药转换雾滴和雾滴空间运动,雾滴扩散过程研究相对较少,尚未得到足够重视。现有研究中,华南农业大学对旋翼气流在水稻冠层上分布规律做了大量研究,但未见实质体现旋翼气流与作物之间互作关系的报道;而在气流环境下雾滴在植株上附着性能的研究报道基本来自于风送式果园研究领域,这与旋翼无人机气流环境存在本质区别。另外,雾滴在气流环境中在叶面上的润湿展布及蒸发的机理研究有待深入。由此可见,该领域具备研究潜力,尚存在大量的基础性问题需要广大学者做出进一步探索。
3.5 施药作业方法研究
施药作业方法是通过对无人机机体及机载装备的控制,实现农药-雾滴的转化,达到雾滴精准抵达作物靶标的目的。施药作业方法目前也是企业、科研院所研究的热点,近2年研究成果数量增长很快,展现出许多新思路和新方法。主要包括机体控制与导航、喷施量控制和作业模式3个方面。
3.5.1 机体控制
在旋翼无人机控制系统与喷洒系统结合的算法设计方面,Faiçal等[119]考虑到具体作物特征和无人机机械结构,提出了微调设置控制规则的进化算法;李继宇等[120-121]分别设计了四旋翼无人机的惯性测量系统,在测试翻滚角误差小于0.5º时确定融合算法权重系数K为12,利用PID闭环控制实现3 m高度悬停飞行的偏移误差不超过5 m;刘浩蓬[122]发现传统PID控制算法在调试稳定后只在飞行器结构参数固定时具有较好的控制品质,而在外界环境干扰较大或者飞行器自身机构特性发生改变时的控制品质较差,基于模糊PID控制的四轴飞行器,能够在线优化控制系数,具有很好的抗干扰能力;孙策等[123]以ARM9为控制核心,设计遥控器或PC计算机为交互设备的无人机农业值保系统;蔡红专等[124]同时采取了模块化设计思路,便于调试和测试,采用了导航级和控制级两级PID控制方式设计了农用喷洒无人直升机飞控系统;李永伟等[125]将六旋翼植保无人机各个传感器的测量参数输入到模糊自适应PID算法中,可以得到对应的控制量,实现飞行器稳定运行;丁力等[126]提出了一种基于线性自抗扰控制(LADRC)算法来实现航向通道高性能控制方法,能够使Trex-600型无人直升机的航向角快速、精确地跟踪参考轨迹。牟涛等[127-128]分别基于Pixhawk开源飞行控制系统的基础上,开展了对植保无人机控制系统的研究,验证了Pixhawk飞行控制的稳定性与可靠性以及与喷洒系统间串口通信的可行性;苑进等[129-130]提出了一种植保无人机的自主飞行控制,铅垂升力与水平推力的驱动解耦保证控制系统的简单可靠,并提出了一种植保无人机专用飞控系统。机体控制方法从PID参数整定到开源飞控Pixhawk研究,从进化算法到驱动解耦,多种方法反映出该领域的研究热度。
除此之外,在旋翼无人机作业的定高、定位、监测、避障方面,卢致辉等[131]设计了一种基于植保无人机超声波可控定高作业系统则使植保无人机实现自我调节并可以实现可控高度;龙文等[132]针对负载发生变化时无人机的高度控制会出现不稳定现象,采用了基于气压计和加速度计卡尔曼滤波融合的高度测量系统,并设计了一个双闭环PID控制加前馈控制的高度控制器;袁玉敏[133]为提高农业植保无人机的定位精度基于GPS和GPRS,设计混合农业植保无人机高精度定位系统可以有效地弥补GPS在复杂环境的定位不足;卢璐等[134]基于RTK技术结合北斗卫星导航系统优化了植保无人机飞控系统,大幅度提高了航线飞行精度;张昆等[135]为了实现无人机飞行状态信息的自动化采集和性能评估,设计了基于 Labview的无人机飞行状态实时监测评估系统,能够用于实时监测、图形化显示、评估和记录无人机飞行状态信息;杨泽等[136]基于Django架构构建了一个用于监听无人机的各种信息服务器端系统实时监听端口数据,采集农业植保无人机实时回传的定位信息、各个传感器以及重要组件的工作状态信息;张逊逊等[137]将无人机与障碍物的相对运动速度引入到人工势场中,给出基于改进人工势场的避障控制算法;肖儒亮[138]采用开源飞控APM,避障控制系统采用开源模块Arduino mega2560,避障测距系统采用超声波测距模块US-016,提出了避障系统控制策略并进行软件设计。
3.5.2 喷施量控制
Zhu等[139]早在2010年设计了一种脉冲宽度调制(PWM)控制器,基于TL494固定频率与数据采集板的精细农业喷雾器,使用LabVIEW 8.2在实验室中进行分析,PWM控制器具有较高的精度喷雾技术的应用前景,提高农药的应用效率;Xue等[140]采用高度集成、超低功耗MSP430单片机设计具有独立功能的模块,设计机载自动控制喷雾系统,在自主规划路线的模式下,取得了喷雾均匀性优于超低体积喷雾变异系数的标准要求;王大帅等[141-142]设计了基于ARM架构单片机的施药控制系统,提出基于PWM(脉宽调制)的施药流量控制方法,采用多传感器融合技术,实现施药参数的实时动态监测;广州极飞科技有限公司公开了一种喷洒控制装置,微控制器根据流量检测信号获取水泵输送液体的实时流量值,并根据实时流量值调节水泵电机的转速,从而准确控制流过水泵的液体流量[143];无锡汉和航空技术有限公司提供一种无人机喷洒农药的作业方法根据不同农作物的特点、农药种类、农药稀释比例、单位面积的喷洒药量并结合无人机的飞行速度,精确计算出液泵控制电压,实现对喷洒流量的精确控制[144];徐旻等[145-146]提供一种基于流量动态预测的无人机喷洒控制系统及方法;兰玉彬等[147-148]提出了一种适用于无人机的变量喷施系统以及喷施系统自动调节装置和方法;王玲等[149-150]设计了微型无人机脉宽调制型变量喷药系统,基于LabWindows/CVI的地面测控软件,采用频率为10 Hz、占空比可调的脉冲信号经无线数传模块远程控制机载喷施系统,以ARM Cortex-M3系列的STM32F103VC微处理器为核心,接收地面控制信号实时调节电动隔膜泵电动机转速,以改变系统喷雾压力和喷药量,实现变量喷雾调节。广大学者集中对PWM流量控制及智能控制方法的研究凸显该方法的重要性。
3.5.3 作业模式研究
BS Faiçal,FG Costa根据田间无线传感器的实时反馈,评估无人机和WSN之间的通信消息数目的影响,利用传感器反馈信息对线路进行调整的作业模式可显著减少农药和化肥的浪费[151];Costa等[152]也有类似田间传感器作业模式研究;Heimfarth等[153]则将无人机视为无线节点之间的连接者;Wang等[154]提出了一种低空多平面编队组成的各种功能模型的无人机作业模式。
彭孝东等[155]为了得到在无导航目视遥控模式下农用无人机的直线飞行特性、检验农田作业航线的人为即时规划情况和评价实际作业质量及效果,设计了基于GPS的坐标采集无线传输系统;王林惠等[156]也研制一种基于图像识别的无人机精准喷雾控制系统;徐博等[157-158]为尽可能地减少飞行总距离和多余覆盖面积,节省无人机的能耗和药液消耗,研究了一种基于作业方向的不规则区域作业航线规划算法;同时利用栅格法对工作区域进行划分,在以作业架次数最少为约束条件的情况下,研究了一种多架次返航路线规划算法[159-160]。张喜海等[161-162]提出了一种基于无线传感器网络的植保无人机喷施作业方法以及一种农用植保无人机来回往复喷施过程中的转弯路径飞行控制方法、装置及无人机;王宇等[163]运用栅格法构建环境模型,根据实际的作业区域规模、形状等环境信息和无人机航向,为相应栅格赋予概率,无人机优先选择概率高的栅格行进,实现了在形状不规则的作业区域内进行往复回转式全覆盖路径规划;杨泽等[164-165]设计一种高效可靠的无人机植保作业电子围栏模式,能够实时检测无人机是否越界,并在有越界风险时及时发出预警;肖儒亮等[166]设计的一种农用无人机喷洒系统以四旋翼无人机为平台,则是利用无线传输技术最终实现喷洒系统的液位高度测量、液位临界点报警、水泵自动关闭等功能;张茂林[167]基于梯田特点,建立梯田覆盖区域模型,结合激光测距仪和多路超声波传感器针对梯田环境模型设计了全区域遍历法,仿真实现了梯田的全覆盖路径飞行。
3.5.4小结
旋翼无人机大田作业首先要控制机体飞行稳定,其次要控制机载喷施设备做变量喷洒,最后结合两者需要对飞行轨迹及参数进行规划。围绕这一主线,施药作业方法已成为广大学者研究的热点,近年来不断涌现出新的方法。但围绕旋翼无人机的气流作业特征,特别是针对旋翼气流规模大小的控制问题和方法,尚未见报道。这需要充分认识到旋翼气流在植保旋翼无人机作业体系中的核心地位,并对直接反映气流作业效果的飞行参数及喷施参数进行融合机理研究。
4 亟待解决的问题及建议
综上所述,国内外学者聚焦旋翼无人机大田植保作业,对机体架构、药箱及其技术、喷头喷嘴系统与方法、旋翼气流检测装置与方法、雾滴沉积、飘移和附着参数、机体控制、喷施控制、路径规划等方面展开了大量研究,逐步形成了农药装载搬运-农药转化雾滴-雾滴空间运动-雾滴作物扩散及施药作业方法的大田气流作业研究体系。然而,考虑到旋翼植保无人机气流作业特征及其核心作用,总体来看,作业体系中现有研究仍然存在着研究内容不均衡、不深入,作业参数关联性不强和作业模式无法直接表征作业效果等亟待解决的问题。
4.1 旋翼无人机作业体系内容研究不均衡,机理研究不深入
从作业体系整体来看,五要素之间存在内在因果联系:①农药装载搬运与②农药转化雾滴过程发生在空中机体部位,也是⑤施药作业方法中能够控制到的地方;④雾滴在作物上的扩散发生在地面冠层,而联系空中机体控制与地面作业效果之间的纽带即为③雾滴空间运动过程,体系中五个部分要素相辅相承,互为作用,缺一不可。而现阶段②与⑤是被多数学者研究的热点,尽管涌现出一些新的思想与方法,但一些经典的控制方法存在简单重复的研究报道;①的研究水平主要体现在植保无人机企业制造的机体,研究院所则缺乏相关深入的研究进展报道;③与④更多的聚焦于雾滴沉积性能方面的研究,这与研究手段和实验工具较易满足存在一定关系,其他诸如飘移性能、气流规律和附着性能的研究报道甚少。这种研究不均衡的现象与近年农用无人机专利申请集中于上述几个热点[168]的趋势保持一致,需要学者们对尚未形成热点的要素深入思考,补充相关研究,构成完整的旋翼无人机作业体系研究链。
同时,在已经形成热点的要素研究中,围绕旋翼无人机气流作业特征,仍有许多需要进一步深入研究的科学问题,比如要素①中根据旋翼产生气流规模如何合理分配载质量与控制资源的问题,要素②中旋翼气流环境下雾滴与喷头或喷嘴脱离过程中状态的变化机理,要素③中无人机飞行参数(高度、速度等)与雾滴空间运动状态的关系,要素④中实质性反映旋翼气流与作物冠层互作关系的机理,要素⑤中直接反映气流作业效果的飞行参数与喷施参数的融合问题,上述问题都是亟需深入展开研究的基础科学问题。基础问题的研究是工程实际应用的前提,2016年、2017年国家自然科学基金批准资助的项目中已经出现了涉及上述部分基础问题的研究课题[169],但仍需要广大学者积极对基础研究投入大量精力。
4.2 旋翼无人机作业参数关联性不强,大田试验条件精准性有待提高
旋翼无人机在田间低空作业时,飞多快,飞多高,载质量多少,药液流量应该是多少?针对这些作业参数的试验与研究已不少见,例如在“3种旋翼无人机的最佳飞行作业参数测定”研究表明,“飞行速度—飞行高度”分别为3 m/s—3 m、2 m/s—2 m、3 m/s—1 m;单组动力最佳作业效率分别为1.88、0.41、9.72 hm2[84],此类研究方法是预先选定离散的无人机作业参数来甄别作业效果;又例如“一种无人机施药雾滴空间质量平衡测试试验方法”研究表示,在平均风速1.7 m/s、平均气温31.5℃、平均相对湿度34.1%的条件下,飞行高度2.5 m、速度5.0 m/s时,3WQF80-10型无人机喷雾作业雾滴在上风向部、顶部、下风向部和底部的平均分布比例为4.4%,2.3%,50.4%和43.7%[82],此类研究思路则为满足一定作业效果后分别测定出对应的无人机作业参数。总体来看,现有无人机作业研究方案普遍缺乏作业参数之间关联性的深入研究,研究结论可以回答出“需要飞多快,需要飞多高”的问题,但尚不能够回答“为什么飞这么快并且飞这么高”的问题。该问题的回答需要在旋翼无人机完整作业体系下寻找出反映作业参数内在关联性的典型物理特征。
精准实施旋翼无人机大田试验并不容易,首先无人机的作业参数需要精准收集。许多研究报道中获取无人机的飞行高度、飞行速度等参数数据的精度不够高,甚至有些是通过估测得来的,由此得到的参数无法体现出实际作业效果;其次田间雾滴参数收集手段精准性需要提高,以水敏纸为代表的雾滴采集卡存在易变色、潮湿环境敏感的问题,如果采样点数量多,每次收集的样本容易产生数据不一致的情况;最后则是田间自然风的影响,旋翼无人机主要依靠气流特征作业,而往往作业过程中自然风直接干扰到旋翼气流分布,而现阶段研究报道中少见对自然风的合理处理方式。今后的旋翼无人机大田试验需要努力避免上述问题,需要大力发展适应于旋翼无人机的田间测量传感器技术及提高测量精度,得到精准可靠的试验数据。
4.3 旋翼无人机作业模式无法直接表征作业效果,高精度飞行参数难转化为作业参数
旋翼无人机田间作业时协同制定各项作业参数的策略是什么?以旋翼无人机施药作业为例,在“基于目视遥控的无人机直线飞行与航线作业试验”中指出根据田块实际大小智能优化并生成作业航线的自主飞行作业模式是未来农用无人机进行精准作业的发展方向[147];在“基于无人机航向的不规则区域作业航线规划算法与验证”中基于作业方向采用算法进行航线规划,无人机作业的多余覆盖率最低可达到11.5%[157];同时在“多架次作业植保无人机最小能耗航迹规划算法研究”中以作业架次数最少为约束条件,相比于仅以药液耗尽为返航依据的航迹规划,能耗节省率达到了12.89%[158]。上述以田块大小、作业方向和作业架次为视角,以覆盖率、能耗为指标的作业模式难以直接体现出实际喷施效果。
而广州极飞科技有限公司推出的P20系列四旋翼无人机则强调采用GNSS RTK(载波相位差分技术)让航线飞行精度达厘米级,为精准喷洒提供条件[170]。该作业模式聚焦于机体飞行精度,能够体现出飞行效果,却无法直接体现喷洒雾滴附着在作物冠层的作业精度和效果。
聚焦旋翼无人机的气流特征,寻找出能够直接表征出作业效果的具体气流特征的物理参数,将有助于旋翼无人机精准作业模式的提出,同时帮助将无人机作业系统中的精准定位目标从机体本体转移到作物靶标,切实提高旋翼植保无人机的大田作业效果。
5 结论与展望
近年随着小型无人机在农业航空上的迅猛发展,旋翼植保无人机大田施药作业作为精准农业航空体系中非常重要的一个环节,吸引了众多学者的目光,涌现出许多研究成果。然而,对于旋翼无人机大田的作业特征:旋翼气流的研究并不多见。旋翼气流本质上是旋翼无人机大田作业体系中制约机体飞行参数以及决定地面作业效果的重要作业参数,对无人机田间作业体系研究具有基础意义。
现有研究中围绕农药装载搬运-农药转化雾滴-雾滴空间运动-雾滴植株扩散-施药作业方法的旋翼无人机大田作业体系,尚存在大载质量特点机体资源配置问题、雾滴物理与运动状态的变化机理、飞行参数与雾滴运动状态的关系、旋翼气流与作物冠层互作机理、飞行参数与喷施参数的融合等基础科学问题需要进一步深入研究。也存在旋翼无人机作业参数关联性不强,大田试验条件精准性有待提高以及作业模式无法直接表征作业效果,高精度飞行参数难转化为作业参数等实践问题亟需解决。
未来研究需要重视旋翼气流在旋翼无人机施药作业体系中的核心纽带作用,进一步探寻出旋翼控制、载质量性能、作业参数三者之间的内在规律;进一步探寻出旋翼气流与雾滴运动之间的本质关系;进一步探寻出旋翼气流与作物植株之间的互作关系将是上述问题的解决思路;加强对旋翼无人机大田施药作业体系的基础科学问题凝练与工程实践问题探索将是上述问题的解决途径;寻找出能够直接反映气流作业特征的各种物理参数将是上述问题的解决方案。
[1]Lan Y B,Chen S D,Fritz B K.Current status and future trends of precision agriculturalaviation technologies[J].International Journal of Agricultural & Biological Engineering,2017,10(3):1-17.
[2]崔涵.中国杂交水稻贡献世界[J].农产品市场周刊,2010(23):28-29.
[3]白人朴.关于水稻生产机械化技术路线选择的几个问题[J].中国农机化学报,2011(1):15-18.BaiRenpu.Severalissues on the route choice of mechanization of rice production technology[J].Chinese Agricultural Mechanization,2011(1):15-18.(in Chinese with English abstract)
[4]罗锡文,王在满.水稻生产全程机械化技术研究进展[J].现代农业装备,2014(1):23-29.
[5]牟楠.水稻全程机械化生产技术及装备研究[J].农业科技与装备,2014(3):34-35.Mou Nan.Research on the technology and equipment for completely mechanized rice production[J].Agricultural Science&Technology and Equipment,2014(3):34-35.(in Chinese with English abstract)
[6]何雄奎.大力推进我国农业航空植保产业发展[J].农机科技推广,2015(3):10-11.
[7]薛新宇,兰玉彬.美国农业航空技术现状和发展趋势分析[J].农业机械学报,2013,44(5):194-201.Xue Xinyu,Lan Yubin.Agricultural aviation applications in USA[J].Transactions of the Chinese Society for Agricultural Machinery,2013,44(5):194-201.(in Chinese with English abstract)
[8]何勇,张艳超.农用无人机现状与发展趋势[J].现代农机,2014(1):1-5.
[9]Giles D K,Akesson N B,Yates W E.Pesticide application technology:Research and development and the growth of the industry[J].American Society of Agricultural and Biological Engineers.2008,51(2):397-403.
[10]刘开新.俄日韩等国家农业航空产业发展现状[J].时代农机,2015,42(7):169-169.
[11]网易无人机.极飞科技成立日本子公司 进军国际植保市场[EB/OL].(2017-01-24)[2017-10-20]/17/0124/11/CBHSN 5UI0001899S.html
[12]华夏经纬网.雅马哈无人机风波:日本阻止我国获取先进技术[EB/OL].http://www.huaxia.com/js/jswz/2006/00415746.html,2006-01-27.
[13]环球网.日媒:大疆创新要在日本小型无人机市场发力[EB/OL].(2015-05-21)[2017-10-20]http://uav.huanqiu.com/hyg/2015-05/6495459.html.
[14]Bruno S F,Gustavo P,Geraldo P R F,et al.Fine-tuning of UAV control rules for spraying pesticides on crop fields:An Approach for dynamic environments[J].International Journal of Artificial Intelligence Tools,2016,25(1):1660003.
[15]Aditya S N,Prof S C K.Adoption and utilization of drones for advanced precision farming:A Review[J].International Journal on Recent and Innovation Trends in Computing and Communication,2016,4(5):563-565.
[16]周志艳,臧英,罗锡文,等.中国农业航空植保产业技术创新发展战略[J].农业工程学报,2013,29(24):1-10.Zhou Zhiyan,Zang Ying,Luo Xiwen,et al.Technology innovation development strategy on agricultural aviation industry for plant protection in China[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2013,29(24):1-10.(in Chinese with English abstract)
[17]周志艳,明锐,臧禹,等.中国农业航空发展现状及对策建议[J].农业工程学报,2017,33(20):1-13.Zhou Zhiyan,Ming Rui,Zang Yu,et al.Development status and countermeasures of agricultural aviation in China[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(20):1-13.(in Chinese with English abstract)
[18]张东彦,兰玉彬,陈立平,等.中国农业航空施药技术研究进展与展望[J].农业机械学报,2014,45(10):53-59.Zhang Dongyan,Lan Yubin,Chen Liping et al.Current status and future trendsof agriculturalaerialspraying technology in China[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(10):53-59.(in Chinese with English abstract)
[19]韩建达,齐俊桐.一种施药无人直升机[J].机器人学研究室,2015.
[20]张逊,戴勇,尚其龙,等.一种智能施药无人直升机:CN103770943A[P].2014-05-07.
[21]李兵,樊江岩,王玉宏.冀北农用无人机优化设计及露地蔬菜飞防植保应用探讨[J].中国蔬菜,2016,1(3):10-12.
[22]张文星.桨叶弧面分布六旋翼的农用植保无人机:CN105438455A[P].2016-03-30.
[23]顾文杰,贺勇,王成波,等.六旋翼农药喷洒无人机的结构设计[J].安徽农业科学,2015(31):335-337.Gu Wenjie,He Yong,Wang Chengbo,et al.Structural design of six-rotor UAV for pesticide spraying[J].Journal of Anhui Agricultural Sciences,2015(31):335-337.(in Chinese with English abstract)
[24]苑进,刘雪美,陈荣康,等.一种低成本高负载的植保专用无人机及驱动方法:CN104554724A[P].2015-04-29.
[25]李俊杰.多旋翼农用无人机螺旋桨装置:CN206351779U[P].2017-07-25.
[26]万丹.植保无人机十字盘双并联舵机结构:CN206125424 U[P].2017-04-26.
[27]李继宇,姚伟祥,兰玉彬,等.一种对称布局多旋翼无人机动态受力中心位置的检测方法: CN201710116231.2[P].2017-07-07.
[28]兰玉彬,姚伟祥,李继宇,等.一种不规则多旋翼无人机悬停状态受力中心位置检测方法: CN201710115933.9[P].2017-06-13.
[29]李继宇,朱长威,欧阳帆,等.一种定载荷电动力无人机的分段能耗评价方法:CN201710407306.2[P].2017-09-15.
[30]李继宇,朱长威,欧阳帆,等.一种动载荷电动力无人机有效作业能耗评价方法:CN201710468644.7[P].2017-09-26.
[31]周志艳,朱秋阳,陈盛德,等.一种折叠快拆式多旋翼无人飞行器:CN204399473U[P].2015-04-08.
[32]黎勇.一种无时间限制地面供电供药植保无人机:CN205872474U[P].2017-01-11.
[33]DJI大疆创新.MG-1S技术参数[EB/OL].[2017-10-20]https://www.dji.com/cn/mg-1s/info#specs
[34]辽宁壮龙无人机科技有限公司 大壮 参数 [EB/OL].[2017-10-20]https://www.zluav.com/dazhuang.html
[35]深圳高科新农技术有限公司 高新 S40主要技术参数[EB/OL].[2017-10-20]http://www.szgkxn.com/UploadFiles/files/20170510100116653.pdf
[36]全丰飞防 全丰无人机 3WQF120-12型智能悬浮植保机[EB/OL].[2017-10-20]http://www.qfhkzb.com/custom/g/32
[37]郑庆伟.“农用航空作业关键技术与装备研发”项目研讨会在南京召开[J].农药市场信息,2016(23):59
[38]王大伟,高席丰.植保无人机药箱建模与姿态控制器设计[J].排灌机械工程学报,2015(11):1006-1012.Wang Dawei,Gao Xifeng.Liquid tank modelling and attitude controller design of plant protection UAV[J].Journal of Drainage and Irrigation Machinery Engine,2015,33(11):1006-1012.(in Chinese with English abstract)
[39]姜锐,周志艳,徐岩,等.植保无人机药箱液量监测装置的设计与试验[J].农业工程学报,2017,33(12):107-115.Jiang Rui,Zhou Zhi】yan,Xu Yan,et al.Design and experiment of liquid quantity monitor for pesticide tank in spraying UAV[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(12):107-115.(in Chinese with English abstract)
[40]周志艳,姜锐,罗锡文,等.液位监测技术在植保无人机中的应用分析[J].农业机械学报,2017,48(4):47-55.Zhou Zhiyan,Jiang Rui,Luo Xiwen,et al.Application analysisof liquid-level monitoring technology to plant protection UAV[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(4):47-55.(in Chinese with English abstract)
[41]何勇,肖宇钊.一种减轻药液倾荡的农用植保无人机药箱:CN204527645U[P].2015-08-05.
[42]李熙,张俊雄,曲峰,等.农用无人机药箱防晃内腔结构优化设计[J].农业工程学报,2017,33(18):72-79.Li Xi,Zhang Junxiong,Qu Feng,et al.Optimal design of anti-sway inner cavity structure of agricultural UAV pesticide tank[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(18):72-79.(in Chinese with English abstract)
[43]李伟,王大帅,张文强,等.一种弹性内腔式植保无人机防震荡药箱:CN201610362703.8[P].2017-11-10.
[44]Lan Y,Opapeju F O,Nyachoti C M.True ileal protein and amino acid digestibilities in wheat dried distillers'grains with solubles fed to finishing pigs[J].Animal Feed Science&Technology,2008,140(1):155-163.
[45]茹煜,金兰,周宏平,等.航空施药旋转液力雾化喷头性能试验[J].农业工程学报,2014,30(3):50-55.Ru Yu,Jin Lan,Zhou Hongping,etal.Performance experiment of rotary hydraulic atomizing nozzle for aerial spraying application[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2014,30(3):50-55.(in Chinese with English abstract)
[46]茹煜,金兰,贾志成,等.无人机静电喷雾系统设计及试验[J].农业工程学报,2015,31(8):42-47.Ru Yu,Jin Lan,Jia Zhicheng,et al.Design and experiment on electrostatic spraying system forunmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(8):42-47.(in Chinese with English abstract)
[47]周宏平,茹煜,舒朝然,等.应用于直升机的航空静电喷雾系统设计与试验研究[C]//中国林业学术大会-s12现代林业技术装备创新发展.2009.
[48]金兰,茹煜.基于无人直升机的航空静电喷雾系统研究[J].农机化研究,2016(3):227-230.Jin Lan,Ru yu.Research on UAV-based aerial electrostatic spraying system[J].Journal of Agricultural Mechanization Research,2016(3):227-230.(in Chinese with English abstract)
[49]王继环.基于无人直升机静电施药装置研究[D].杨凌:西北农林科技大学,2015.Wang Jihuan.Application of Unmanned Electrostatic Spraying Apparatus Unmanned Helicopter Based on the Deposition Effect[D].Yangling:Northwest A&F University,2015.(in Chinese with English abstract)
[50]文晟,兰玉彬,张建桃,等.农用无人机超低容量旋流喷嘴的雾化特性分析与试验[J].农业工程学报,2016,32(20):85-93.Wen Sheng,Lan Yubin,Zhang Jiantao,et al.Analysis and experiment on atomization characteristics of ultra-low-volume swirl nozzle for agricultural unmanned aviation vehicle[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(20):85-93.(in Chinese with English abstract)
[51]刘武兰,周志艳,陈盛德,等.航空静电喷雾技术现状及其在植保无人机中应用的思考[J].农机化研究,2018,40(5):1-9.Liu Wulan,Zhou Zhiyan,Chen Shengde,et al.Status of aerial electrostatic spraying technology and its application in plant protection UAV[J].Journal of Agricultural Mechanization Research,2018,40(5):1-9.(in Chinese with English abstract)
[52]廉琦.多旋翼无人机静电喷雾系统的试验研究[D].大庆:黑龙江八一农垦大学,2016.
[53]田源,邹凡,杨金星,等.基于无人机的静电离心喷雾装置的设计[J].南方农机,2017,48(12):9.
[54]孙竹,薛新宇,张宋超,等.农业航空自适应离心雾化控制系统:CN204148033U[P].2015-02-11.
[55]周晴晴.航空低量窄雾滴谱旋转离心喷嘴雾化性能研究[D].南京:中国农业科学院,2016.Zhou Qingqing.Research ofNarrow DropletsSpectral Atomization Property of Centrifugal Nozzle in Low Volume Aviation Spray[D]. Nanjing: Chinese Academy of AgriculturalSciences,2016.(in Chinese with English abstract)
[56]高圆圆.无人直升机(UAV)低空低容量喷洒农药雾滴在禾本科作物冠层的沉积分布及防治效果研究[D].哈尔滨:东北农业大学,2013.Gao Yuanyuan.Study on Distribution of Pesticide Droplets in Gramineous Crop Canopy and Control Effect Sprayed by Unmanned Aerial Vehicle(UAV)[D].Haerbin:Northeast Agricultural University,2013.(in Chinese with English abstract)
[57]Huang Y,Hoffmann W C,Lan Y,et al.Development of a spray system for an unmanned aerial vehicle platform[J].Applied Engineering in Agriculture,2009,25(6):803-809.
[58]Giles D K,Billing R,Anderson P G,et al.Unmanned aerial platforms for spraying:Deployment and performance[J].Aspects of Applied Biology,2014,122:64-69.
[59]武志明,王云岗,刘伟洪,等.一种植保无人机喷头、雷达自动调节装置及其使用方法:CN107037822A[P].2017-08-11.
[60]于海涛,李君兴,董云哲,等.植保无人机喷雾性能综合实验台设计[J].时代农机,2016,43(9):38.Yu Haitao,Li Junxing,Dong Yunzhe,et al.Plant protection design of UAV spray performance comprehensive experimental platform[J].Hunan Agricultural Machinery,2016,43(9):38.(in Chinese with English abstract)
[61]徐兴,徐胜,刘永鑫,等.一种用于多旋翼无人施药机的喷头增稳装置及方法:CN103587688 A[P].2014-02-19.
[62]李继宇,罗锡文,张铁民,等.一种无人机作业飞行器用的伸缩装置及其作业方法:CN103274053 B[P].2015-07-29.
[63]王飞,林劲,梁水,等.一种具有喷洒方向控制的植保无人机:CN205910593U[P].2017-01-25.
[64]宋坚利,刘亚佳,何雄奎,等.单旋翼植保无人机用农药喷洒系统:CN203946276U[P].2014-11-19.
[65]王森.单旋翼无人机航空施药效果分析与试验研究[D].大庆:黑龙江八一农垦大学,2016.
[66]张伟巍,杨克军.浅谈如何保证农用飞机喷洒作业质量[J].农机质量与监督,2013(11):24-26.
[67]吕晓兰,傅锡敏,吴萍,等.我国果园风送式喷雾技术研究现状[C]//植保机械与施药技术国际学术研讨会.2010.
[68]张文星.桨叶弧面分布六旋翼的农用植保无人机:CN105438455A[P].2016-03-30.
[69]梁建,薛新宇,周立新,等.移动式无人机农用喷洒作业风场测试设备及测试方法:CN101718615A[P].2010-06-02.
[70]薛新宇,屠康,兰玉彬,等.无人机高浓度施药对水稻品质的影响[J].农业机械学报,2013,44(12):94-98.Xue Xinyu,Tu Kang,Lan Yubin,et al.Effects of pesticides aerial applications on rice quality[J].Transactions of the Chinese Society for Agricultural Machinery,2013,44(12):94-98.(in Chinese with English abstract)
[71]胡炼,周志艳,罗锡文,等.无人直升机风场无线传感器网络测量系统设计与试验[J].农业机械学报,2014,45(5):221-226.Hu Lian,Zhou Zhiyan,Luo Xiwen,et al.Development and experimentofawirelesswind speed sensornetwork measurement system for unmanned helicopter[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(5):221-226.(in Chinese with English abstract)
[72]李继宇,姚伟祥,林晋立,等.一种适用于无人机的立体风场测量系统及其使用方法:CN201610973681.9[P].2017-05-17.
[73]李继宇,林晋立,兰玉彬,等.无人机旋翼下方风场测量平台及采用该平台的风场测量方法:CN201710151904.5[P].2017-08-18.
[74]李继宇,黄聪,兰玉彬,等.一种零点可调的动压式风速测量装置:CN201610983366.4[P].2017-04-19
[75]兰玉彬,刘琪,李继宇,等.一种带检测功能的模拟无人机室外飞行环境的风房:CN201611106776.7[P].2017-05-31.
[76]李诚龙.多旋翼无人机高空飞行稳定控制问题研究[D].杭州:浙江大学,2016.Li Chenglong.Flight Stability And Automatic Control of Multirotor UAVs in a Wide Range Task[D].Hangzhou:Zhejiang University,2016.(in Chinese with English abstract)
[77]杨璐鸿.纵列式六旋翼大载荷无人机气动特性数值模拟及其优化研究[D].长春:吉林大学,2015.Yang Luhong.Aerodynamic CharacteristicsNumerical Simulation and Optimization Research of Tandem Six-Rotor Large Loads UAV[D].Changchun:Jilin University,2015.(in Chinese with English abstract)
[78]李继宇,朱长威.一种检测旋翼无人机气动特性的装置及检测方法:CN201710241797.8[P].2017-09-01.
[79]Lan Y,Hoffmann W C,Fritz B K,et al.Spray drift mitigation with spray mix adjuvants[J].Applied Engineering in Agriculture,2008,24(1):5-10.
[80]廖娟,臧英,周志艳,等.作物航空喷施作业质量评价及参数优选方法[J].农业工程学报,2015,31(增刊2):38-46.Liao Juan,Zang Ying,Zhou Zhiyan,et al.Quality evaluation method and optimization of operating parameters in crop aerial spraying technology[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(Supp.2):38-46.(in Chinese with English abstract)
[81]张京,何雄奎,宋坚利,等.无人驾驶直升机航空喷雾参数对雾滴沉积的影响[J].农业机械学报,2012,43(12):94-96.Zhang Jing,He Xiongkui,Song Jianli,et al.Influence of spraying parameters ofunmanned aircrafton droplets deposition[J].Transactionsofthe Chinese Society for Agricultural Machinery,2012,43(12):94-96.(in Chinese with English abstract)
[82]王昌陵,何雄奎,王潇楠,等.无人植保机施药雾滴空间质量平衡测试方法[J].农业工程学报,2016,32(11):54-61.Wang Changling,He Xiongkui,Wang Xiaonan,etal.Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(11):54-61.(in Chinese with English abstract)
[83]王昌陵,宋坚利,何雄奎,等.植保无人机飞行参数对施药雾滴沉积分布特性的影响[J].农业工程学报,2017,33(23):109-116.Wang Changling,Song Jianli,He Xiongkui,et al.Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(23):109-116.(in Chinese with English abstract)
[84]王俊伟,贾峰勇,张梁.3种旋翼无人机飞行作业参数测定及农药剂型比较[J].中国植保导刊,2014,34(增刊1):55-58.
[85]许童羽,于丰华,曹英丽,等.粳稻多旋翼植保无人机雾滴沉积垂直分布研究[J].农业机械学报,2017,48(10):101-107.Xu Tongyu,Yu Fenghua,Cao Yingli,etal.Vertical distribution of spray droplet deposition of plant protection multi rotor UAV for japonica rice[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(10):101-107.(in Chinese with English abstract)
[86]秦维彩,薛新宇,张宋超,等.基于响应面法的P20型多旋翼无人机施药参数优化与试验[J].江苏大学学报:自然科学版,2016,37(5):548-555.Qin Weicai,Xue Xinyu,Zhang Songchao,et al.Optimization and test of spraying parameters for P20 multi rotor electric unmanned aerial vehicle based on response surface method[J].Journal of Jiangsu University:Natural Science Editions,2016,37(5):548-555.(in Chinese with English abstract)
[87]薛新宇.航空施药技术应用及对水稻品质影响研究[D].南京:南京农业大学,2013.Xue Xinyu.Applications ofModern Pesticide Aerial Application Technology and the Impact on Rice Quality[D].Nanjing:Nanjing Agricultural University,2013.(in Chinese with English abstract)
[88]陈盛德,兰玉彬,李继宇,等.小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J].农业工程学报,2016,32(17):40-46.Chen Shengde,Lan Yubin,Li Jiyu,et al.Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(17):40-46.(in Chinese with English abstract)
[89]陈盛德,兰玉彬,李继宇,等.植保无人机航空喷施作业有效喷幅的评定与试验[J].农业工程学报,2017,33(7):82-90.Chen Shengde,Lan Yubin,Li Jiyu,et al.Evaluation and test of effective spraying width of aerial spraying on plant protection UAV[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(7):82-90.(in Chinese with English abstract)
[90]陈盛德,兰玉彬,Bradley K F,等.多旋翼无人机旋翼下方风场对航空喷施雾滴沉积的影响[J].农业机械学报,2017,48(8):105-113.Chen Shengde,Lan Yubin,Bradley K F,et al.Effect of wind field below rotor on distribution of aerial spraying droplet deposition by using multi-rotor UAV[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(8):105-113.(in Chinese with English abstract)
[91]陈盛德,兰玉彬,李继宇,等.航空喷施与人工喷施方式对水稻施药效果比较[J].华南农业大学学报,2017,38(4):103-109.Chen Shengde,Lan Yubin,Li Jiyu,et al.Comparison of the pesticide effects of aerial and artificial spray applications for rice[J].Journal of South China Agricultural University,2017,38(4):103-109.(in Chinese with English abstract)
[92]Chen S D,Lan Y B,Li J Y,et al.Effect of wind field below unmanned helicopter on droplet deposition distribution of aerial spraying[J].International Journal of Agricultural&Biological Engineering,2017,10(3):67-77.
[93]兰玉彬,陈盛德,姚伟祥,等.一种农用无人机喷雾防漂移装置及其使用方法:CN201610218229.1[P].2016-04-11.
[94]王潇楠,何雄奎,王昌陵,等.油动单旋翼植保无人机雾滴飘移分布特性[J].农业工程学报,2017,33(1):117-123.Wang Xiaonan,He Xiongkui,Wang Changling,et al.Spray drift characteristics of fuel powered single-rotor UAV for plant protection[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(1):117-123(in Chinese with English abstract)
[95]王潇楠.农药雾滴飘移及减飘方法研究[D].北京:中国农业大学,2017.Wang Xiaonan.Study on Spray Driftand Anti-drift Method[D].Beijing:China Agricultural University,2017.(in Chinese with English abstract)
[96]国家精准农业航空中心 国家专项 地面与航空高工效施药技术及智能化设[EB/OL][2017-10-20]http://npaac.scau.edu.cn/a/guoji.http://npaac.scau.edu.cn/a/guojiazhuanxiang/dimianyuhangkonggaogongxiaoshiy/
[97]常蕊.加强农业工程科技创新推动农业供给侧改革:中国农业工程学会2017年学术年会(CASE2017)在淄博市圆满召开[J].农业工程,2017,7(5):2.
[98]周良富,薛新宇,贾卫东,等.CFD技术在果树风送喷雾中的应用与前景分析[J].排灌机械工程学报,2014,32(9):776-782.Zhou Liangfu,Xue Xinyu,Jia Weidong,et al.Application of CFD technology in air-assisted spraying in orchard and analysis of its prospects[J].Journal of Drainage and Irrigation Machinery Engin,2014,32(9):776-782.(in Chinese with English abstract)
[99]互动百科 禾本科 形态特征 [EB/OL].[2017-10-20]http://www.baike.com/wiki/禾本科
[100]李继宇,周志艳,胡炼,等.单旋翼电动无人直升机辅助授粉作业参数优选[J].农业工程学报,2014,30(10):10-17.Li Jiyu,Zhou Zhiyan,Hu Lian et al.Optimization of operation parameters for supplementary pollination in hybrid rice breeding using uniaxial single-rotor electric unmanned helicopter[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2014,30(10):10-17.(in Chinese with English abstract)
[101]李继宇,周志艳,胡炼,等.圆形多轴多旋翼电动无人机辅助授粉作业参数优选[J].农业工程学报,2014,30(11):1-9.Li Jiyu,Zhou Zhiyan,Hu Lian,et al.Optimization of operation parameters for supplementary pollination in hybrid rice breeding using round multi-axis multi-rotor electric unmanned helicopter[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2014,30(11):1-9.(in Chinese with English abstract)
[102]李继宇,周志艳,兰玉彬,等.旋翼式无人机授粉作业冠层风场分布规律[J].农业工程学报,2015,31(3):77-86.Li Jiyu,Zhou Zhiyan,Lan Yubin,et al.Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(3):77-86.(in Chinese with English abstract)
[103]Li J Y,Lan Y B,Wang J W,et al.Distribution law of rice pollen in the wind field of small UAV[J].International Journal of Agricultural&Biological Engineering,2017,10(4):32-40.
[104]徐文彬,王军锋,闻建龙,等.大载荷植保无人直升机近地飞行流场模拟[J].江苏大学学报:自然科学版,2017,38(6):665-671.Xu Weibin,Wang Junfeng,Wen Jianlong,et al.Numerical simulation for downwash flow field of large-size plant protection unmanned helicopter hedgehopping[J].Journal of Jiangsu University:Natural Science Editions,2017,38(6):665-671.(in Chinese with English abstract)
[105]王军锋,徐文彬,闻建龙,等.大载荷植保无人直升机喷雾气液两相流动数值模拟[J].农业机械学报,2017,48(9):62-69.Wang Junfeng,Xu Wenbin,Wen Jianlong,et al.Numerical simulation on gas-liquid phase flow of large-scale plant protection unmanned aerial vehicle spraying[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(9):62-69.(in Chinese with English abstract)
[106]王森.单旋翼无人机航空施药效果分析与试验研究[D].大庆:黑龙江八一农垦大学,2016.
[107]李中秋,汤楚宙,王慧敏,等.气流作用位置对杂交水稻制种气力式授粉花粉分布的影响[J].农业工程学报,2012,28(增刊 2):107-113.Li Zhongqiu,Tang Chuzhou,Wang Huimin,et al.Effects of location of airflow on pollen distribution for pneumatic pollination in hybrid rice breeding[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2012,28(Supp.2):107-113.(in Chinese with English abstract)
[108]王景旭,祁力钧,夏前锦.靶标周围流场对风送喷雾雾滴沉积影响的CFD模拟及验证[J].农业工程学报,2015,31(11):46-53.Wang Jingxu,Qi Lijun,Xia Qianjin.CFD simulation and validation of trajectory and deposition behavior of droplets around target affected by air flow field in greenhouse[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(11):46-53.(in Chinese with English abstract)
[109]王志强,郝志强,刘凤之,等.气力雾化风送式果园静电弥雾机的研制与试验[J].果树学报,2017(9):1161-1169.
[110]董祥.植保机械喷头雾滴撞击植物叶面过程试验测试及仿真研究[D].北京:中国农业机械化科学研究院,2013.Dong Xiang.SystematicInvestigation of3-dimentional Spray Droplet Impaction on Leaf Surfaces[D].Beijing:Chinese Academy of Agricultural Mechanization Sciences,2013.(in Chinese with English abstract)
[111]张铁,董祥,尹素珍,等.轻便型高地隙喷杆喷雾机大豆田间施药试验[J].农业机械学报,2016,47(增刊):182-188.Zhang Tie,Dong Xiang,Yin Suzhen,et al.Spraying performance of lightweight high clearance boom sprayer in soybean field[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(supp):182-188.(in Chinese with English abstract)
[112]张瑞瑞,陈立平,兰玉彬,等.航空施药中雾滴沉积传感器系统设计与实验[J].农业机械学报,2014,45(8):123-127.Zhang Ruirui,Chen Liping,Lan Yubin,et al.Development of a deposit sensing system for aerial spraying application[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):123-127.(in Chinese with English abstract)
[113]张瑞瑞,文瑶,伊铜川,等.航空施药雾滴沉积特性光谱分析检测系统研发与应用[J].农业工程学报,2017,33(24):80-87.Zhang Ruirui,Wen Yao,Yi Tongchuan,et al.Development and application of aerial spray droplets deposition performance measurement system based on spectral analysis technology[J].Transactionsofthe Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(24):80-87.(in Chinese with English abstract)
[114]蔡坤,兰玉彬,李继宇,等.一种农药雾滴沉积与蒸发检测装置及方法:CN106442235A[P].2017-02-22.
[115]李继宇,高泽锋,兰玉彬,等.一种田间颗粒物作业参数实时检测装置及其方法:CN201610247643.5[P].2016-09-21.
[116]吴亚垒,祁力钧,张亚,等.基于驻波率原理的农药雾滴沉积量检测系统设计与试验[J].农业工程学报,2017,33(15):64-71.Wu Yalei,Qi Lijun,Zhang Ya,et al.Design and experiment of pesticide droplet deposition detection system based on principle of standing wave,ratio[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(15):64-71.(in Chinese with English abstract)
[117]周晓欣,雾滴蒸发规律的探索及几种航空喷雾助剂的评价[D].沈阳:沈阳农业大学,2017.Zhou Xiaoxin.Droplets Evaporation Rule of Exploration and Evaluation of Several Aviation Spray Adjuvants[D].Shenyang:Shenyang AgriculturalUniversity,2017.(in Chinese with English abstract)
[118]杨帅.无人机低空喷雾雾滴在作物冠层的沉积分布规律及防治效果研究[D].北京:中国农业科学院,2014.Yang Shuai.Spray Droplet Deposition and Distribution Inside Crop Canopy and Control Efficiency Applied by Unmanned Aerial Vehicle[D].Beijing:Chinese Academy of AgriculturalSciences,2014.(in Chinese with English abstract)
[119]Faiçal B S,Pessin G,Filho G P R,et al.Exploiting Evolution on UAV Control Rules for Spraying Pesticides on Crop Fields[M].Engineering Applications of Neural Networks.Springer International Publishing,2014:49-58.
[120]李继宇,张铁民,彭孝东,等.四旋翼飞行器农田位置信息采集平台设计与实验[J].农业机械学报,2013,44(5):202-206.Li Jiyu,Zhang Tiemin,Peng Xiaodong,et al.Collection platform of field location information based on four-rotor aircraft[J]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(5):202-206.(in Chinese with English abstract)
[121]廖懿华,张铁民,兰玉彬.农田信息采集用多旋翼无人机姿态稳定控制系统设计与试验[J].农业工程学报,2017,33(3):88-98.Liao Yihua,Zhang Tiemin,Lan Yubin.Design and test of attitude stabilization control system of multi-rotor unmanned aerial vehicle applied in farmland information acquisition[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(3):88-98.(in Chinese with English abstract)
[122]刘浩蓬.植保四轴无人飞行器关键技术研究[D].武汉:华中农业大学,2015.Liu Haopeng.Key TechnologiesofEppo Unmanned Quadrocopter[D].Wuhan:Huazhong Agricultural University,2015.(in Chinese with English abstract)
[123]孙策,董立志,丁宁,等.基于ARM9的无人机农业植保作业系统[J].金田,2015(3):465.
[124]蔡红专,牟涛,刘静超,等.一种农用喷洒无人机飞控系统的设计[J].农业与技术,2015(17):41-42.
[125]李永伟,王红飞.六旋翼植保无人机模糊自适应PID控制[J].河北科技大学学报,2017,38(1):59-65.Li Yongwei,Wang Hongfei.Fuzzy adaptive PID control for six rotor eppo UAV[J].Journal of Hebei University of Science and Technology,2017,38(1):59-65.(in Chinese with English abstract)
[126]丁力,马瑞,单文桃,等.小型无人直升机航向线性自抗扰控制[J].农业机械学报,2017,48(5):22-27.Ding Li,Ma Rui,Shan Wentao,etal.Linear active disturbance rejection control for yaw channel of small-scale unmanned helicopter[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(5):22-27.(in Chinese with English abstract)
[127]牟涛.Pixhawk飞控技术在植保无人机上的应用与实践[D].西安:西京学院,2017.Mou Tao.Application and Practice of Pixhawk Flight Control Technology in Plant Protection UAV[D].Xi’an:Xijing University,2017.(in Chinese with English abstract)
[128]蒋彪.基于Pixhawk的植保无人机控制系统研究[D].武汉:湖北工业大学,2017.Jiang Biao.Research of Control System for Plant Protection Unmanned Aerial Vehicle based on Pixhawk[D].Wuhan:Hubei University of Technology,2017.(in Chinese with English abstract)
[129]苑进,刘雪美,陈荣康,等.一种驱动解耦植保无人机的控制系统及控制方法:CN104407586A[P].2015-03-11.
[130]苑进,刘雪美,陈荣康,等.一种植保无人机专用飞控系统:CN204270115U[P].2015-04-15.
[131]卢致辉,屈党行.一种基于植保无人机超声波可控定高作业系统:CN204536909U[P].2015-08-05.
[132]龙文,陈洋,吴怀宇,等.变载荷下六旋翼无人机高度控制[J].传感技术学报,2017,30(7):1125-1130.Long Wen,Chen Yang,Wu Huaiyu,et al.Altitude control of six rotor UAVs with variable load[J].Chinese Journal of Sensors and Actuators,2017,30(7):1125-1130.(in Chinese with English abstract)
[133]袁玉敏.农业植保无人机高精度定位系统研究与设计:基于GPS和GPRS[J].农机化研究,2016,38(12):227-231.Yuan Yumin.Research and design ofhigh-precision positioning system for agricultural plant protection UAV-based on GPS and GPRS[J].Journal of Agricultural Mechanization Research,2016 28(12):227-231.(in Chinese with English abstract)
[134]卢璐,耿长江,边玥,等.基于RTK的BDS在农业植保无人直升机中的应用[C]//中国卫星导航学术年会.2017.
[135]张昆,张铁民,廖贻泳,等.基于Labview的无人机飞行状态实时监测评估系统设计[J].农业工程学报,2016,32(18):183-189.Zhang Kun,Zhang Tiemin,Liao Yiyong,et al.UAV flight status real-time monitoring evaluation system based on Labview[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(18):183-189.(in Chinese with English abstract)
[136]杨泽,郑立华,李民赞,等.基于Django的植保无人机飞行监视系统[J].农业网络信息,2016(9):41-47.Yang Ze,Zheng Lihua,Li Minzan,et al.A monitoring system of UAVs for plant protecting based on django[J].Agriculture Network Information,2016(9):41-47.(in Chinese with English abstract)
[137]张逊逊,许宏科,朱旭.低空低速植保无人直升机避障控制系统设计[J].农业工程学报,2016,32(2):43-50.Zhang Xunxun,Xu Hongke,Zhu Xu.Design of obstacle avoidance control system for low altitude and low speed eppo unmanned helicopter[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(2):43-50.(in Chinese with English abstract)
[138]肖儒亮.植保无人机避障技术应用研究[D].西安:西京学院,2017.Xiao Ruliang.Application and Research of Avoidance Technology about Crop Protection UAV[D].Xi’an:Xijing University,2017.(in Chinese with English abstract)
[139]Zhu H,Lan Y,Wu W,et al.Development of a PWM precision spraying controller for unmanned aerial vehicles[J].Journal of Bionic Engineering,2010,7(3):276-283.
[140]Xue X,Lan Y,Sun Z,et al.Develop an unmanned aerial vehicle based automatic aerial spraying system[J].Computers&Electronics in Agriculture,2016,128:58-66.
[141]王大帅,张俊雄,李伟,等.植保无人机动态变量施药系统设计与试验[J].农业机械学报,2017,48(5):86-93.Wang Dashuai,Zhang Junxiong,Li Wei,et al.Design and test of dynamic variable spraying system of plant protection UAV[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(5):86-93.(in Chinese with English abstract)
[142]李伟,王大帅,张俊雄,等.一种植保无人机智能施药系统:CN205661666U[P].2016-10-26.
[143]彭斌,黎登峰.喷洒控制装置、喷洒系统和植保无人机:CN205509903U[P].2016-08-24.
[144]黄海,沈建平.一种无人机喷洒农药的作业方法:CN102591302A[P].2012-07-18.
[145]徐旻,陈立平,张瑞瑞,等.基于流量动态预测的无人机喷洒控制系统及方法:CN 105947216A[P].2016-09-21.
[146]王继环,赵春江,王秀,等.一种模拟旋翼飞机农药静电喷洒沉积装置的设计与试验[J].农机化研究,2016,38(1):95-100.Wang Jihuan,Zhao Chunjiang,Wang Xiu,et al.Design and test of an analog rotorcraft electrostatic spraying pesticide deposition apparatus[J]. Journal of Agricultural Mechanization Research,2016,38(1):95-100.(in Chinese with English abstract)
[147]兰玉彬,姚伟祥,王林琳,等.一种适用于无人机的变量喷施系统:CN201610973668.3[P].2017-05-17.
[148]兰玉彬,陈盛德,刘琪,等.一种农用无人机喷施系统自动调节装置及调节方法:CN201610673650.1[P].2016-11-09.
[149]王玲,兰玉彬,Clint Hoffmann W,等.微型无人机低空变量喷药系统设计与雾滴沉积规律研究[J].农业机械学报,2016,47(1):15-22.Wang Ling,Lan Yubin,Clint Hoffmann W,et al.Design of variable spraying system and influencing factors on droplets deposition of small UAV[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(1):15-22.(in Chinese with English abstract)
[150]王玲.多旋翼植保无人机低空雾滴沉积规律及变量喷施测控技术[D].北京:中国农业大学,2017.Wang Ling.Research on Low-Attitude Droplets Deposition and Technology of Variable Spraying Measurement and ControlSystem based on Multi-rotorCrop Protection UAV[D].Beijing:China Agricultural University,2017.(in Chinese with English abstract)
[151]Faiçal B S,Costa F G,Pessin G,et al.The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides[J].Journal of Systems Architecture,2014,60(4):393-404.
[152]Costa F G,Ueyama J,Braun T,et al.The use of unmanned aerial vehicles and wireless sensor network in agricultural applications[C]// Geoscience and Remote Sensing Symposium.IEEE,2012:5045-5048.
[153]Heimfarth T,Araujo J P D.Using unmanned aerial vehicle to connect disjoint segments of wireless sensor network[C]//IEEE,International Conference on Advanced Information Networking and Applications.IEEE Computer Society,2014:907-914.
[154]Wang Z,Lan Y,Clint H W,et al.Low altitude and multiple helicopter formation in precision aerial agriculture[C]//2013 Kansas City,Missouri,July 21-July 24,2013.
[155]彭孝东,张铁民,李继宇,等.基于目视遥控的无人机直线飞行与航线作业试验[J].农业机械学报,2014,45(11):258-263.Peng Xiaodong,Zhang Tiemin,Li Jiyu,et al.Experiment of straight and airline flight operation for farmland based on UAV in visual remote mode[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(11):258-263.(in Chinese with English abstract)
[156]王林惠,甘海明,岳学军,等.基于图像识别的无人机精准喷雾控制系统的研究[J].华南农业大学学报,2016,37(6):23-30.Wang Linhui,Gan Haiming,Yue Xuejun,et al.Design of a precision spraying control system with unmanned aerial vehicle based on image recognition[J].Journal of South China Agricultural University,2016,37(6):23-30.(in Chinese with English abstract)
[157]徐博,陈立平,谭彧,等.基于无人机航向的不规则区域作业航线规划算法与验证[J].农业工程学报,2015,31(23):173-178.Xu Bo,Chen Liping,Tan Yu,et al.Route planning algorithm and verification based on UAV operation path angle in irregular area[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(23):173-178.(in Chinese with English abstract)
[158]徐博,陈立平,谭彧,等.多架次作业植保无人机最小能耗航迹规划算法研究[J].农业机械学报,2015,46(11)::36-42.Xu Bo,Chen Liping,Tan Yu,et al.Path planning based on minimum energy consumption for plant protection UAVs in Sorties[J]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(11):36-42.(in Chinese with English abstract)
[159]徐博.植保无人机航线规划方法研究[D].北京:中国农业大学,2017.Xu Bo.Research on Route Planning for Plant Protection Unmanned Aerial Vehicles[D].Beijing:China Agricultural University,2017.(in Chinese with English abstract)
[160]徐博,陈立平,徐旻,等.多作业区域植保无人机航线规划算法[J].农业机械学报,2017,48(2):75-81.Xu Bo,Chen Liping,Xu Min,et al.Path planning algorithm for plant protection UAVs in multiple operation areas[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(2):75-81.(in Chinese with English abstract)
[161]张喜海,于啸,魏晓莉,等.一种基于无线传感器网络的植保无人机喷施作业方法:CN103950540A[P].2014-07-30.
[162]张喜海,范成国,房俊龙,等.农用植保无人机来回往复喷施过程中的转弯路径飞行控制方法、装置及无人机::CN107065919A[P].2017-08-18.
[163]王宇,陈海涛,李煜,等.基于Grid-GSA算法的植保无人机路径规划方法[J].农业机械学报,2017,48(7):29-37.Wang Yu,Chen Haitao,Li Yu,et al.Path planning method based on Grid-GSA for plant protection UAV[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(7):29-37.(in Chinese with English abstract)
[164]杨泽,郑立华,李民赞,等.基于射线检测算法的无人机植保作业电子围栏设计[J].农业机械学报,2016,47(增刊1):442-448.Yang Ze,Zheng Lihua,Li Minzan,et al.Design of electronic fence of UAV for plant protection assignment based on ray method[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(Supp.1):442-448.(in Chinese with English abstract)
[165]杨泽,郑立华,李民赞,等.基于R树空间索引的植保无人机与植保作业匹配算法[J].农业工程学报,2017,33(增刊 1):92-98.Yang Ze,Zheng Lihua,Li Minzan,et al.Matching algorithm for plant protecting unmanned aerial vehicles and plant protecting jobs based on R-tree spatial index[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(Supp.1):92-98.(in Chinese with English abstract)
[166]肖儒亮,何景峰,张广桢.农用无人机喷洒系统研究[J].农业与技术,2016,36(5):71-72.
[167]张茂林.面向梯田环境的四旋翼飞行器路径规划与跟踪控制研究[D].深圳:深圳大学,2016.Zhang Maolin.Research on Path Planning and Tracking ControlofQuad RotorforTerracesEnvironment[D].Shenzhen:Shenzhen University,2016.(in Chinese with English abstract)
[168]黄欢,苏琦.农业无人机领域中国专利申请态势分析[J].现代农业科技,2016(13):347-348.
[169]国家自然科学基金委员会科学基金网络信息系统项目综合查询 [EB/OL].https://isisn.nsfc.gov.cn/egrantindex/funcindex/prjsearch-list
[170]杨晶,张颖达.极飞农业引领植保无人机行业发展[J].农机市场,2016(4):38-39.
猜你喜欢
科学大众(2021年21期)2022-01-18 05:53:46
广西植保(2021年4期)2022-01-06 07:55:00
今日农业(2021年17期)2021-11-26 23:38:44
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
新农业(2017年2期)2017-11-06 01:02:23
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
新农业(2016年22期)2016-08-16 03:34:45
深空探测学报(2016年2期)2016-05-17 05:19:19