基于高斯过程的ADS-B监视性能评估研究
2018-07-18 03:26张榆薪王欣
现代计算机 2018年17期
张榆薪,王欣
(中国民用航空飞行学院计算机学院,广汉 618307)
0 引言
广播式自动相关监视(ADS-B)是一种航行监视的新技术,因其相对于传统监视技术的众多优势,被国际民航组织确定为未来主要的监视技术。由于ADS-B地面站受到众多不良因素的影响,例如所处地形环境和电磁环境以及地面站自身性能限制等,所以导致ADS-B的监视性能达不到我们需要的监视要求,但ADS-B监视数据提供的各项信息以及监视数据报文本身的一些表征能反映出这些不良因素带来的影响,因此分析研究ADS-B数据,并基于此对监视性能进行评估具有非常重要的意义。
随着ADS-B的发展,对其的评估工作也相伴而行。在国外有Mueller对ADS-B数据报文中的NUCP和NACP质量进行的验证评估[1]、Schafer和Strohmeier的研究团队也进行了许多的评估验证工作[2-3]等。在国内有王子龙[4]、唐鹏[5]等进行了ADS-B的评估研究。
本文将在ADS-B数据信息能直观反映影响ADSB运行性能的不良因素的思想基础上,从数据的角度出发,分析航迹数据点特征,结合相关性能标准,对ADS-B监视性能进行评估,包括精度与完好性、漏点、离散度和跳点。在分析漏点、离散度和跳点时,为了避免传统方法建模的复杂性,本文使用了机器学习中的高斯过程回归来进行处理。最后通过实例,验证了方法的可行性,对从数据角度出发研究分析ADS-B监视性能具有一定的参考意义。
1 航迹数据分析与高斯过程回归
1.1 航迹数据分析
航迹数据是时间上的一系列位置信息点集,我们将真实航迹记作g={gi|i=1,2,…,N},对应的时间集为t={ti|i=1,2,…,N}。由于存在不可避免的不确定性和干扰,我们收到的位置信息总是有偏差的,所以收到的报告航迹y=g+ε,其中ε为偏差。在文献[6]中对偏差分布规律进行了研究,结果表明偏差服从正态分布。根据文献[6]的研究结果,我们可以将高斯回归模型用于对报告航迹的研究,即通过该模型找到时间t与报告航迹y之间的映射关系,以便分析漏点、离散度和跳点。
1.2 高斯过程回归
介绍高斯过程回归时,先将问题描述如下:通过观察,得到了一个训练集T={(xi,fi),i=1…N},其中fi=f(xi),xi的维度为M。现在又假定有一个测试集X*,它是一个N*×M的矩阵,希望经过相应的运算得到与测试集X*相对应的输出向量f*的预测。
为了方便描述,此处令向量f=(f1…fN)'。高斯过程回归解决上述问题的方案如下:假设测试集与输入集服从联合正态分布,即:

其中μ是训练集的均值向量,为测试集的先验均值向量。K、K*、K**,是通过核函数K计算出来的协方差矩阵,这里将其进行如下的描述:
然后根据贝叶斯方法,可以求出f*的后验概率:


2 基于数据的ADS-B评估方法
2.1 精度及完好性评估
在对航空器进行监视时,获得的监视位置信息需要满足一定的精度及完好性,而这个精度及完好性能帮助两架航空器在飞行时保持安全间隔。这里的精度与完好性是一种概率描述。在ADS-B报文数据中就包含有精度与完好性的相关编码信息,其编码与转换规则参见文献[7]。根据ICAO规定,NUCP≥5的ADS-B报文数据才符合类雷达服务的数据完好性要求,所以可得出精度与完好性的评估方法,即在一段时间内,从接收到的ADS-B数据中提出NUCP,并计算出NUCP≥5的航空器飞行航迹数量占接收到的总的ADS-B航迹数量的比例,则可得到位置信息精度率和完好率。
2.2 漏点评估
由于地形、电磁干扰等不良因素的影响,ADS-B数据接收会出现遗漏。通过漏点分析的反馈,以便我们及时地监测和调整,使漏点率处在一个安全的范围,确保航空的安全运行。
理论上,ADS-B航迹数据的更新周期为1s,所以我们可以这样计算漏点率:先计算出航迹起点与终点的时间差ΔT,然后计算出从起点到终点理论上应有的总的航迹点数,最后计算理论总点数TN与实际点数之差占理论总点数TN的比例即得到了漏点率。对于漏掉的数据点,我们可以利用已有的数据点,通过高斯过程回归方法计算得到。
2.3 离散度与跳点
由于ADS-B监视数据传输的过程中的各种不可避免的干扰和数据解析过程中存在的偏差,导致航空器飞行的真实航迹位置数据与我们通过ADS-B获得的报告航迹位置数据存在偏差,即位置数据的离散度。当离散度超过一定的值时,称为跳点。离散度和跳点率体现了监视系统在传输数据时的抗干扰能力以及解析过程的精确性。
计算离散度和跳点的关键在于找寻到一条代替真实航迹的基准航迹。一般在找寻这条基准航迹时使用卡尔曼滤波法[5],本文使用高斯过程回归方法,即利用已知数据,找到时间与航迹点的映射关系,从而得到一条基准航迹。接着通过报告航迹与基准航迹的偏差计算,得到离散度与跳点。
3 实验与分析
实验的数据集来自中国民航飞行学院的ADS-B数据集。原始的数据集里航迹点是按时间排列,并且同一时刻会有多架飞机的数据,所以在进行评估分析前,需要通过时间与标识号找出每条具体的航迹并储存。
3.1 精度及完好性评估分析
总结2.1节中方法,得到精度及完好性评估分析步骤如下:
第1步:从保存航迹数据的数据库中统计出航迹点总数。
第2步:从保存航迹数据的数据库中提取出所有航迹数据的SIL、NIC以及NACP信息。
第3步:根据NIC、NACP与NUCP的转换规则,对完好性情况进行统计分类,若满足NUCP≥5,则该条航迹数据属于满足监视雷达所需要求的一类,否则属于不满足要求的一类。这里需要注意的是SIL的等级编码必须为3才是符合要求的。
第4步:依据第3步中获得统计,要得到位置信息精度及完好率,可按照公式:位置信息精度及完好率=符合要求的航迹点总数/总航迹点数。
按照上述步骤,统计结果如图1-3,完好率约为99.982%。
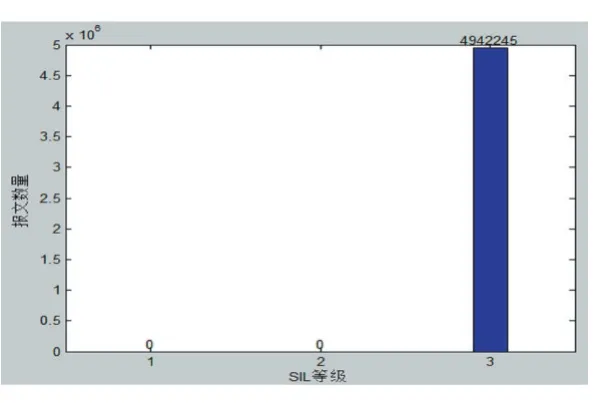
图1
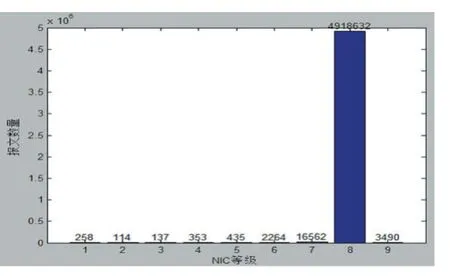
图2
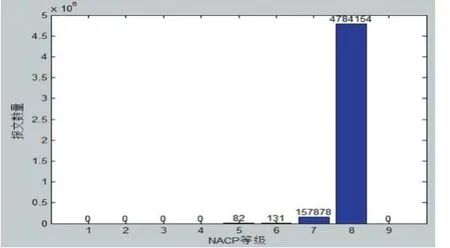
图3
3.2 漏点评估
根据2.2中所述的方法,从实际获得的数据集中随机抽取10次,每次包含100条航迹数据信息,得到了如表1的漏点率统计结果。

表1
从表1中,可以看出有的样本的漏点率较低,有的却有很大。
通过高斯过程回归可以得到具体漏点,并它画在百度地图上,如图4所示,其中报告航迹为青色、圆形,真实航迹为红色、星形。
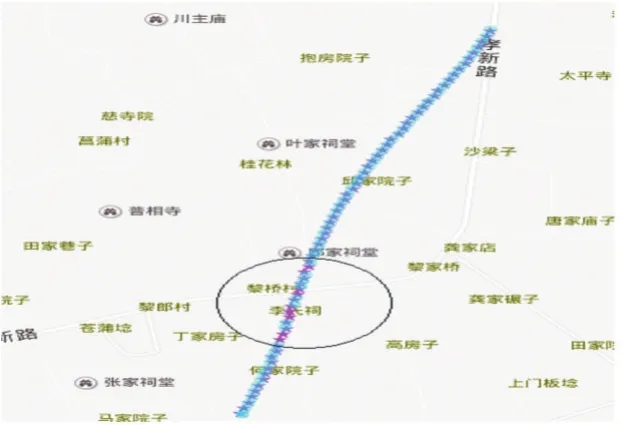
图4
这里需要说明的是航迹位置信息的经度、纬度两组状态之间没有耦合,其对应的测量值也是分别独立的,因此,可以将经度、纬度分别进行回归处理。
3.3 离散度与跳点
根据2.3节中的方法,得出离散度计算步骤如下:
(1)利用建立好的模型,对实际数据航迹进行训练与回归预测,得到关于输出值的概率分布;
(2)取概率分布对应于时间集合t的均值向量作为基准航迹,然后将实际航迹与基准航迹进行对比,统计航迹位置信息离散度。
根据上述步骤,得到的统计结果如图5。一般我们去300m为跳点阈值。
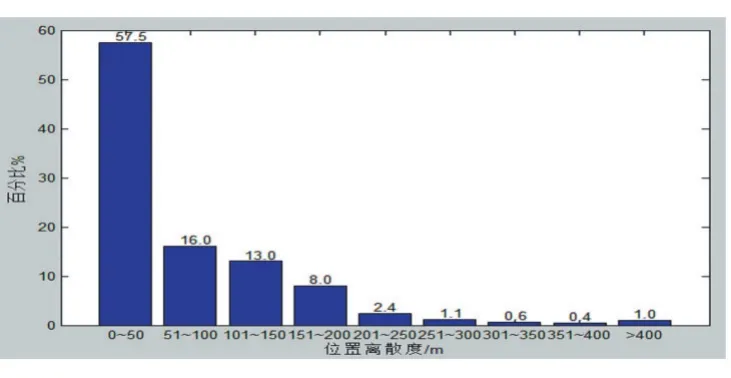
图5
4 结语
对ADS-B的性能评估具有重要意义,本文在ADS-B数据信息能直观反映影响ADS-B运行性能的不良因素的思想基础上,从数据的角度出发,分析航迹数据点特征,结合高斯过程模型,对精度及完好性、漏点、离散度和跳点进行了评估,并利用中国民航飞行学院数据集进行了实验。结果表明了评估方法的可行性,尤其是高斯过程用于分析漏点与离散度的可行性,具有一定的参考价值。
猜你喜欢
城镇供水(2022年4期)2022-08-20
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
科技视界(2022年9期)2022-04-09
工业技术创新(2020年5期)2020-12-21
雷达科学与技术(2020年4期)2020-09-11
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
电影故事(2015年16期)2015-07-14