一种S和Ka双频段相控阵卫星动中通天线设计
2018-07-16 11:54周家喜彭立军张正宇
无线电工程 2018年8期
周家喜,彭立军,张正宇
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
0 引言
随着我国天地一体化信息网络重大工程启动建设,卫星通信的应用范围将越来越广泛,诸如民航飞机、火车、长途客车等载体都逐步加装动中通卫星通信系统,以实现在运动过程中的不间断卫星通信。
在全球范围内,卫星通信主要工作频段有UHF频段、L/S频段、C频段、Ku频段、Ka频段,并朝着EHF和太赫兹等更高频段发展,目前动中通系统大多针对单一频段进行设计,在实际使用时可选择的卫星资源相对较少,给应用带来一定的限制[1-2];另外受到高速运动载体安装空间的限制,比如飞机和高铁等对气动外形有严格要求的平台,对动中通天线的高度也有严格的限制。采用抛物面天线的动中通普遍较高,只能安装在对高度要求不严格的平台上,近年来研究的重点是平板阵列形式天线的动中通[3-6],文献[7-9]研究了不同形式的天线及极化跟踪技术,文献[10-17]研究了各种伺服跟踪技术。
为了能更好地满足同时支持多颗卫星且天线高度低的要求,相控阵技术逐渐应用于卫星通信中[6-7]。本文针对双频段天线设计以及相控阵体制在卫星动中通方面应用开展了研究,设计研制了一种同时支持S和Ka频段、采用了相控阵体制的动中通天线,进一步降低了天线的高度,以满足更多高速运动平台的应用需求。
1 动中通天线系统总体设计
动中通天线的天线类型以及跟踪方式众多,根据采用的天线形式可以分为抛物面天线和切割抛物面天线、平板阵列天线,3种形式的天线高度依次降低。从采用的跟踪体制可分为两维机械跟踪、一维机械一维相控阵跟踪、两维相控阵跟踪,其中两维机械跟踪体制的动中通已有非常成熟产品。当前研究的热点则是采用平板天线的低剖面相控阵动中通,主要包含一维机械一维相控阵跟踪体制和两维相控阵跟踪体制,其中两维相控阵体制由于受到天线扫描范围的限制,目前主要是应用于导弹、战斗机等对气动外形要求非常严格的平台,且需要使用多个天线才能满足全空域的覆盖要求。一维机械一维相控阵体制既发挥了相控阵的快速跟踪和低剖面的优势,又保留了机械跟踪在空域覆盖范围上的优势。
1.1 系统硬件设计
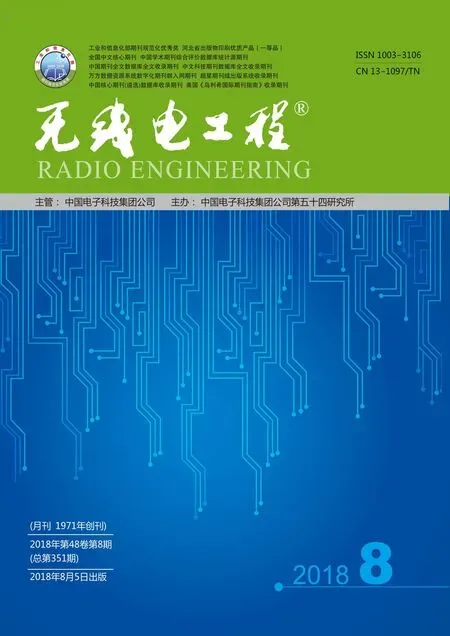
一维机械一维相控阵体制的动中通天线一般指方位机械跟踪和俯仰相控跟踪,从结构上可以分为转子和定子两部分,转子部分可实现360°无限制旋转,以保证方位向对卫星的跟踪,定子部分则实现与平台的安装接口等。从实现的功能模块上看,包含无源平板天线、发射组件、接收组件、功分器、收发通道、校正收发通道、微波铰链、汇流环、波控单元、伺服控制以及电源等部分组成。S和Ka双频段一维机械一维相控阵跟踪体制的动中通天线原理如图1所示。
系统中主要的模块功能为S和Ka频段的无源天线实现信号的空间收发。发射组件即为小功率功放,主要实现信号的末级放大,发射组件内部包含有数字移相器、数控衰减器、滤波和功放等。接收组件主要实现对天线接收信号的初级放大,接收组件内部包含低噪声放大器、数控移相器和滤波器等。功分器和合路器则实现信号的合成和分配,功分器是将发射通道输出的信号功分至多个发射组件;合路器则是将多个接收组件输出的信号进行合成,输出一路信号到接收通道后续处理模块。发射通道实现发射信号的放大
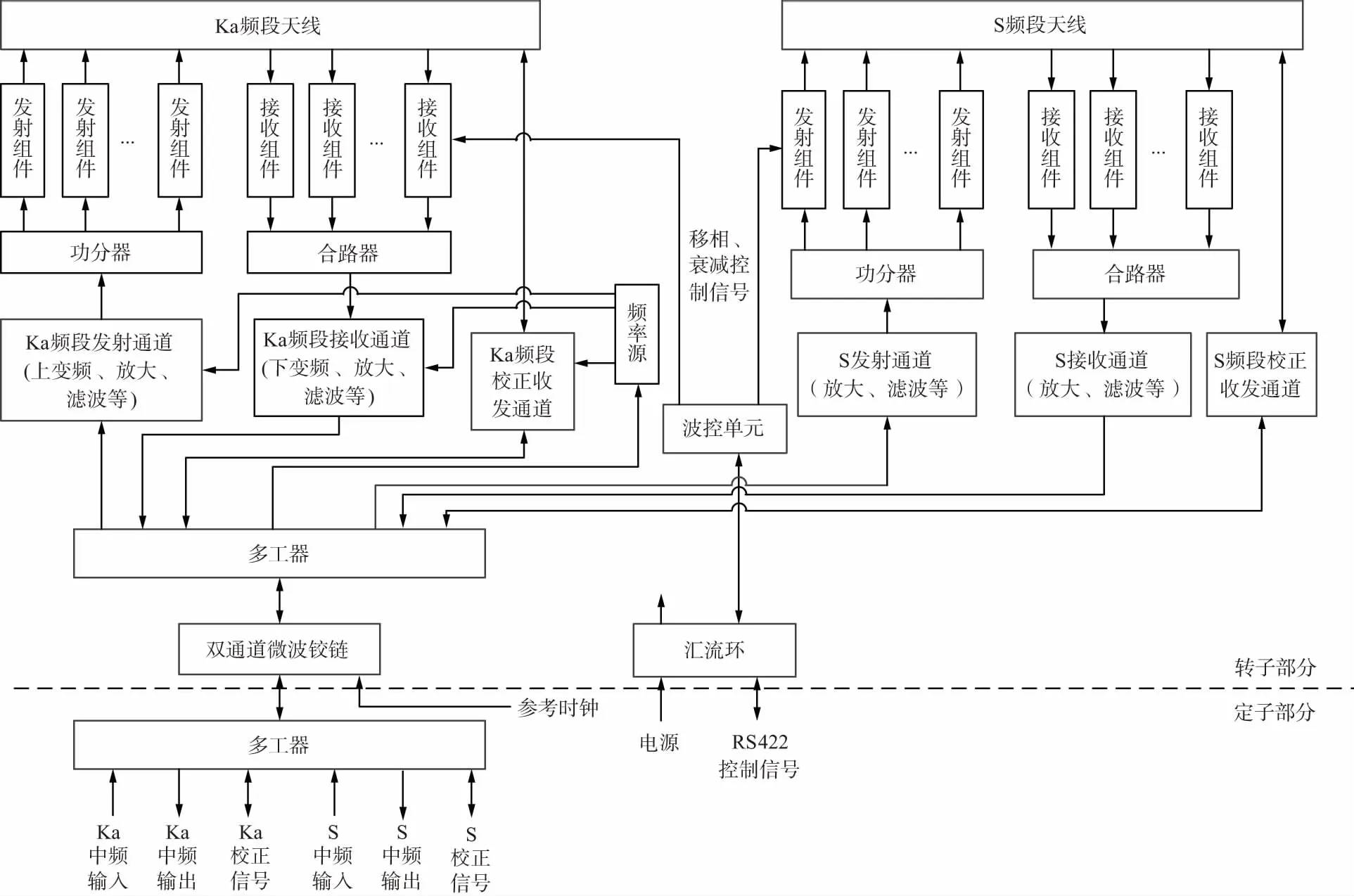
图1 一维相控阵体制双频段天线实现原理
和滤波等功能;接收通道实现接收信号放大和滤波等功能。波控单元则实现对发射组件和接收组件内的数控移相器以及数控衰减器的实时控制,以调整天线的波束指向,实现对卫星的实时跟踪。校正收发通道则实现校正信号的发射和接收。汇流环和微波铰链分别实现低频控制信号、电源和射频信号从伺服转台的定子部分到转子部分的传输。
由于Ka频段信号传输损耗大,特别是通过微波铰链时的损耗很大,且Ka频段的毫米波铰链成本极高,因此在系统设计时,将频率源和相应的变频模块放置到天线转子部分,最终变为S频段或者L频段经过多工器合并后再经过双通道的微波铰链。
转子部分的频率源为Ka频段收发通道、Ka频段接收通道以及Ka频段校正通道中的变频器提供本振时钟,特别需要注意的是,相控阵系统需要进行校正,因此全系统时钟需进行相参设计,频率源的参考时钟采用外部输入。
在该系统中,除了结构的紧凑集成设计外,最重要的是Ka频段相控阵的设计与校正以及伺服跟踪控制两个方面。
1.2 Ka频段天线与组件的综合优化设计
Ka频段相控阵天线采用多个通道并行收发,在天线设计时,为满足上半空域覆盖,天线至少需要实现±45°的扫描角度,俯仰向的天线单元间距约为半个波长;另外对于Ka频段,功放芯片的效率相对较低,通常在30%左右,且单个芯片输出功率较小,通常在1 W左右。为了实现天线阵面上热量的均匀分布,便于系统散热,在进行天线设计时除了将天线设计为俯仰向每行一个接口外,在方位向也将天线一分为二,即将天线设计为2列N行的形式,进一步增加通道数量,以在总的EIRP要求不变的前提下,降低每个通道的发射功率要求。这种设计方案既可以实现发射组件的轻小型化,又可以实现热量的均匀分布,且可直接将组件安装于天线背面,利用天线板进行散热。天线设计及组件安装示意图如图2所示。
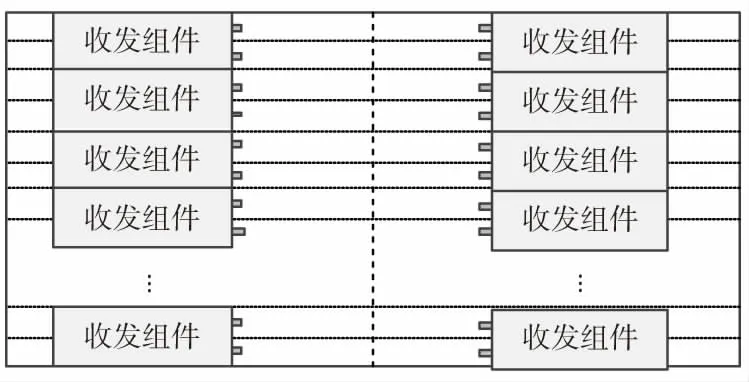
图2 天线设计及组件安装示意
1.3 相控阵天线校正设计
由于Ka频段元器件本身的一致性较差,再加上加工工艺来带的误差,使得各个天线单元以及收发组件之间的幅度和相位存在较大的不一致性,为了有效合成波束,必须对相控阵天线系统进行校正,消除各个通道之间的不一致性。通常的发射校正采用时分方式,每次打开一个发射通道,这种校正方式需要在每个发射组件内部集成开关,并且还需要波控单元输出开关控制信号到每个发射组件,增加了组件和系统的设计复杂度。而BIT(Built-in Test)行波校正法则可以利用信号的正交性,不需要对发射组件进行开关控制,可极大简化发射组件的设计,减少了模块之间的连接电缆数量。
BIT行波校正法通过在天线单元与发射组件之间增加行波馈电网络,实现对天线单元近似等幅度和线性相位激励。在单根线阵下加一根耦合波导作为校正网络,耦合波导与天线之间耦合度设计为-45 dB,校正网络与天线阵采用一体化设计和加工。校正网络的输出端接校正收发通道模块,另一端接匹配负载。校正网络结构示意图如图3所示。
图3 校正网络设计示意
BIT行波校正原理为:发射机输出射频信号激励天线,校正耦合网络通过耦合通道耦合输出各发射组件的射频信号形成行波信号,再将行波信号输出到待检的馈电系统中,从而用注入到行波馈电网络的信号来模拟辐射到θ方向的远场信号(θ为波束偏离天线阵面法线方向的角度)。在通道相位校准过程中,按照一定波束指向角(-45°~45°),设置所有移相器的相位来模拟辐射到不同角度的远场信号,通过有序地改变波束指向,接收机测出每一扫描位置发射信号的相位和幅度值,并将信号通过接口送入计算机,在计算机内进行矩阵求逆后可以得到阵元幅度和相位值。
对于N个单元的阵列天线,最终将获得一组N个复数代数方程,每个方程代表由各单元激励的远场辐射场E(θm),m从1步进到N,利用矩阵求逆来求解这组方程可以得到阵元的激励电压。校正实现原理框图如图4所示。
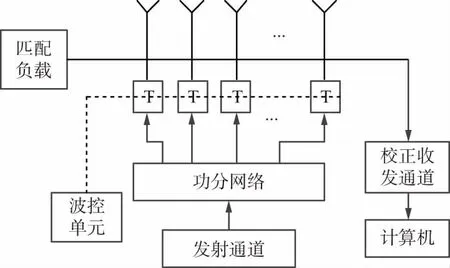
图4 BIT行波校正原理
1.4 伺服跟踪系统设计
在进行伺服跟踪时,首先根据当前使用卫星的经纬度以及载体的经纬度和高度信息,计算出天线在地理坐标系下的方位和俯仰角。伺服平台安装在载体上,只能以载体坐标系为基准控制天线运动。为了保持天线波束指向稳定,在控制天线运动前必须进行坐标转换,求得在载体坐标系下的天线控制角度。
在地理坐标系中,天线波束指向应与单位矢量[u]重合
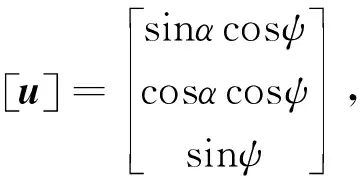
式中,ψ为天线俯仰角;α为天线方位角。
一般情况下,地理坐标系和载体坐标系的轴线是不重合的,将单位矢量[u]转换到载体坐标系有:
式中,αt、ψt、θt分别为载体的偏航角、俯仰角和横滚角;[αt],[ψt]和[θt]均为3×3坐标旋转矩阵,
所以,在载体坐标系中[u]b为:
式中,
Xb=cosψ[cosθtsin(α-αt)+sinθtsinψtcos(α-αt)]-
sinψsinθtcosψt;
Yb=cosψcosψtcos(α-αt)+sinψsinψt;
Zb=cosψ[sinθtsin(α-αt)-cosθtsinψtcos(α-αt)]+
sinψcosθtcosψt。
进而可以求得天线在载体坐标中的方位角αb和俯仰角ψb分别为:
(6)
在完成波束指向角度的计算后,首次伺服系统控制方位电机驱动转台使得天线波束指向方位角αb,然后再通过波控单元控制发射组件和接收组件内的移相器,实现俯仰波束指向俯仰角ψb,使天线法线指向与单位矢量u重合。在完成运动补偿后,天线将指向既定目标,然后控制器检测到跟踪接收机送来的信号强度幅值反馈信息,通过小步进调整天线指向,使得接收到的信号幅值最大,通过这个信号幅值检测跟踪最后实现了系统闭环跟踪。
由于动中通天线系统规模一般相对较小,波控单元需要控制的移相器数量也较少,在设计时可以直接将天线各个扫描角度对应的移相器数值计算好并生成移相码表常驻于内存之中,波控单元在进行俯仰向波束控制时,首先根据扫描角度信息查移相码表,得出每个移相器对应的移相码数值,再按照相应时序关系,通过控制接口将移相码送到各移相器。
2 系统测试结果与分析
根据以上设计方案研制了S和Ka频段一维机械一维相控阵动中通系统的试验样机,并进行了天线的暗室测试以及卫星跟踪通信试验,如图5所示。

图5 天线暗室测试和外场跟踪试验
2.1 天线暗室测试结果
S频段一维相控阵天线的收发波束均可进行相控阵扫描,远场暗室测试中分别测试了收发波束在-35°、0°、35°扫描角对应的方向图,结果如图6所示。
Ka频段一维相控阵天线的波束可进行相控阵扫描,远场暗室测试中分别测试了波束在-35°、-20°、0°、20°、35°扫描角对应的方向图,结果如图7所示。
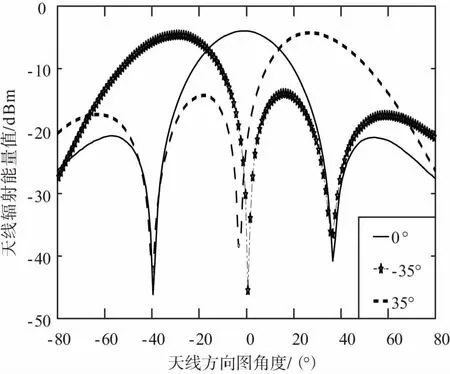
图6 S频段波束法向及扫描方向图
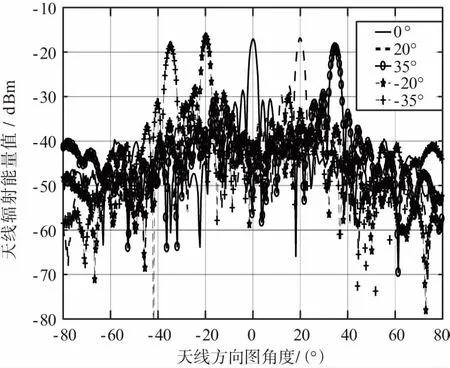
图7 Ka频段波束法向及扫描方向图
2.2 卫星跟踪试验情况
利用外场环境搭建测试平台以验证天线的卫星跟踪功能。天线安装在一个测试转台上,开启测试转台,让测试转台在俯仰向和方位向进行动态运转,以模拟正式安装平台的动态特性。外场的另一端搭建一个由测试电脑、频谱仪和接收天线组成的信号接收平台,在进行测试时,开启Ka频段发射天线,让发射波束指向信号接收平台,信号接收平台实时采样接收到的Ka频段发射波束的功率值,通过计算得出功率偏差值以及偏差值对应的发射波束指向误差。通过试验测试表明,系统的跟踪误差小于十分之一的波束宽度。同时开展了卫星对接试验,验证了相控阵业务通信,实现了双向的数据传输。
3 结束语
本文设计的双频段卫星动中通天线可以实现单台设备同时支持2个频段工作。一维机械跟踪一维相控阵跟踪体制,不仅提升了跟踪的响应速度,同时还因为天线可以倾斜安装,降低了天线的整体高度。采用BIT行波校正算法,将校正网络和天线一体化设计,在满足校正功能的同时简化了发射组件和波控单元的设计。本文设计的天线系统,不仅结构紧凑、集成度高,同时因为采用了相控阵体制,将原先一个大功率功放变成多个独立的发射组件,单个组件的实效不会对系统的通信性能带来太大的影响,极大地提升了系统的任务可靠性。实际研制的样机进行了暗室测试和动态卫星通信试验,验证了设计的可行性。
猜你喜欢
航空维修与工程(2022年10期)2022-12-21
数学物理学报(2022年5期)2022-10-09
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
电子设计工程(2022年4期)2022-02-27
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
数学物理学报(2020年1期)2020-04-21
电子制作(2019年24期)2019-02-23
机械制造(2018年4期)2018-09-20