基于机器视觉的竹片颜色分选系统设计
2018-07-11 03:04夏颖怡
装备制造技术 2018年5期
刘 红,邓 宸,夏颖怡
(1.云南机电职业技术学院,云南 昆明650203;2.赛宝认证中心,广东 广州 510000)
0 引言
随着国家对绿色环保的要求越来越高,利用价格低廉易于取材的竹材制作竹地板深受消费者喜爱,市场发展迅速。竹地板的制作主要分为基材(竹片)的加工,选片分拣和基材组合后加工三个过程。其中选片分拣是按照生产企业的要求,对竹片的主检测面(通常为正面)进行4~6种的颜色分类。传统的人工分色分拣效率低,误差大[1]。
文献[2]表明将机器视觉技术应用于木材及胶合板加工中,对木材表面色差进行分选可有效提高在线检测速度,保证检测质量,提高生产效率。虽然我国应用机器视觉针对木材颜色分类的研究不少,但由于竹材与木材在力学特性、外观及竹片特有的生产工艺上与木材有较大区别,分类时同类竹片颜色差异较小,工艺上要求分类速度快,针对竹材设计相关成熟的机器视觉检测分选系统具有重要意义。
1 系统总体设计
本文设计的基于竹片颜色特征的在线选片分拣系统主要由机器视觉模式识别系统(称之为上位机)和机械分选控制系统(称之为下位机)两大子系统组成。应用图像采集器(工业相机)和计算机组成上位机系统进行基于竹片颜色的图像分类。由上料装置、传动装置、分拣装置以及PLC控制装置组成下位机系统。上位机进行图像采集处理和模式识别之后将识别结果传输到下位机,下位机根据识别结果,通过PLC控制装置控制相互配合的三个机械装置完成竹片的上料、传动、分拣和入库工作,实现竹片分选的自动运行。设计架构如图1所示。
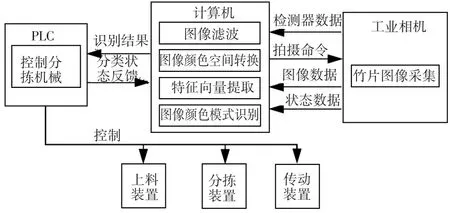
图1 系统框图
一般基于内容的图像分类过程包括数字图像的读取、数字图像处理、特征提取、图像分类和结果输出等。上位机采用配有USB接口、以太网接口的工业相机对竹片样品进行拍照取样,将采集到的图像传输到计算机内的指定路径下进行数字图像的读取。而文献[3]表明MATLAB 7.0软件不仅对图形处理功能和一般数据可视化软件功能(例如二维曲线和三维曲面的绘制和处理等)方面表现完善,而且对于一些其他软件所没有的功能(例如图形的光照处理、色度处理以及四维数据的表现等)也有出色的处理能力。故数字图像处理、特征提取、图像分类和结果输出等模式识别算法则利用计算机系统软件MATLAB来实现。
下位机的上料装置通过离心震荡器不断工作,使后面竹片推着前面竹片成密排列状螺旋上升来到振动上料装置的出口。竹片由于自身的重力作用以及后方竹片的推动作用在连接杆中匀速滑落,平稳落到输送皮带上。竹片随输送皮带向工业相机移动,工业相机的红外检测装置探测到竹片来到工业相机下方,此时发送一个脉冲信号给上位机。上位机收到信号后发送一个上升信号给工业相机模块,命令相机对竹片进行拍照,之后相机将采集到的数字图像发送到上位机。上位机接收到数字图像后对图像进行处理和模式识别,完成识别后向下位机发送识别结果。下位机收到识别结果后,通过S7-200PLC控制器控制分拣装置工作。电机通过丝杆螺母配合控制分拣气缸移动到对应竹片种类库边,由气缸中的活塞(滑竿)将竹片推入库中完成分拣。如果上位机的识别表明样品竹片不属于4类标准竹片中的任何一件,则将竹片推入废料库中。系统的组成结构示意图见图2.

图2 系统的组成结构示意图
2 数字图像处理
由于工业环境大多处在复杂电磁环境、高噪音以及灰尘中,故图像在生成、获取和传输过程中难免出现图像噪声,且不同扫描分辨率所生成图像质量也不同。为避免这些噪声影响到之后特征值提取及模式识别的准确性,故需要对采集到的图像进行降噪和增强处理。
2.1 图像降噪
图像降噪处理首先采用傅里叶变换,把图像空间转换到频域空间直接进行处理,在频域内对高频范围的分量进行适当的抑制,即去除高频部分分量,就可以改变输出图的频率分布,达到滤出高频噪声的目的。本设计使用在MATLAB中自定义函数'butterworth'来实现图像的巴特沃斯低通滤波。其中设置了4种不同的滤波截止频率 D0,分别是 15、30、50、80.其中发现 D0=50或D0=80时滤波效果较好。
2.2 数字图像增强
在图像采集过程中可能会出现采集图像偏暗或偏亮,这时需要对数字图像进行修正或增强。数字图像的统计直方图反应了这幅图像中不同灰度级像素的出现情况,且图像和其统计直方图有对应关系,可采用直方图均衡化或直方图规定化对数字图像进行增强。由于直方图规定化可以按用户规定的向量对图像直方图进行处理,灵活性较高,参数向量设置合理可以得到较好的图像增强效果[4]。故应用MATLAB软件中自定义函数 'adapthisteq(T,vall,param2,val2…)'对图像进行自适应直方图规定化处理。经测试,当val1取值在0.01~0.05之间效果较好。
3 模式识别
为了让计算机对竹片进行颜色分类,需要提取竹片的颜色特征,并针对竹片的颜色特征设计相应的分类器,即对竹片颜色进行模式识别。
3.1 图像颜色空间
提取竹片颜色前,首先需要建立颜色空间,把颜色用一种数学方法——颜色空间来表示,用它来准确的描述颜色,使颜色形象化。根据应用对象的不同数字图像工程中颜色空间主要有①面向硬件设备的颜色空间RGB和CMY颜色空间;②面向彩色图像处理的颜色空间HSI;③CIE颜色空间,L*a*b*和XYZ颜色空间。由工业相机获取的彩色图像被直接表示成 RGB 颜色空间,但红(R)、绿(G)、蓝(B)成分与人对颜色的感觉并无直接联系,而L*a*b*颜色空间在三维空间中每个坐标轴上视觉颜色和心理感知颜色是等距的,并且有明度指数和色品指数细致的级差,色差分辨力非常强,特别适合在小色差情况下颜色的测量和分辨。因此L*a*b*颜色空间在大量行业中都得到了大范围的应用,尤其是在诸如竹纤维品、木纤维品、地砖、陶瓷还有纺织品这些颜色较为单一材质的分析上。所以本设计选用L*a*b*颜色空间进行特征值提取。利用MATLAB中自定义函数'RGB2Lab',RGB颜色空间可以方便地转换到L*a*b*颜色空间。
3.2 L*a*b*颜色空间特征值提取
在L*a*b*均匀颜色空间内,数字图像以像素为基本单位,所以对图像进行颜色特征获取也应该以像素为基本单位。L*a*b*色度指数中,L*为心理计量明度,L*值越大试件颜色越浅,a*值表示红绿轴的变化,b*值黄蓝轴的变化。可以提取的颜色特征有L*、a*、b* 三个分量的均值及其均差△L*、△a*、△b*;色调角Ag*和C*彩度的均值及其均差△Ag*、△C*;单幅图像各像素颜色参数与整幅图像颜色均值之间的色差参数△E*和色相参数△H*等;图像中各参数的标准差 D△L*、D△a*、D△b*、D△Ag*、D△C*、D△E*、D△H* 等[5]。其中 L*、a*、b*、Ag*、C*5个颜色参数均值描述了物体样品的整体颜色特征,而其7个色差参数均差和7个色差标准差描述了物体样品各像素点与其均值之间的差值,即偏离差。以上竹材表面颜色的原始特征参数构成19维特征向量T.这19维特征向量可充分分析同类竹片间细微的颜色差异。
3.3 竹片颜色分类器设计
对竹片颜色的分类时,迫切希望计算机能看懂人类是如何分类的。于是需要针对竹片的颜色特征设计相应的计算机能处理的分类器。这个分类器的最主要工作就是区分竹片图像的颜色,即对竹片颜色进行模式识别。
距离测度模板匹配法是最简单的识别方法,用一个未知的样品与已知的不同标准模板比较,看他们的相似度是多少,若相似度为100%,则说明它们完全相同。设A和B为两个标准样品模板,其n维特征向量分别为 XA= (xA1,xA2,…,xAn)T和 XB=(xB1,xB2,…,xBn)T。而待识别样品 X 的特征向量为:X=(x1,x2,…,xn)T。如果 X=XA,则样品为 A.若 X=XB则样品为B.所以也可认为如果X距离XA比X距离XB近,则X属于XA,反之属于XB.因任意两点间距离为式(1),其欧式距离远近可作为判断依据,构成欧式距离分类器,判别法的数学表示为式(2)。
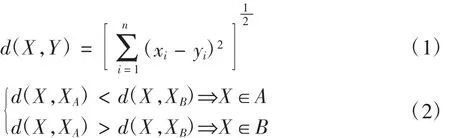
在MATLAB中利用自定义主函数'main(void)'可以实现对竹片颜色的分类。在此程序中共设置了4个模 板 分 别 为 num1.jpg()、num2.jpg、num3.jpg、num4,jpg,通过计算得出4个模板的19维特征向量T1、T2、T3、T4.若样品图像的19维特征向量为T,计算T和T1、T2、T3、T4欧氏距离di(Ti,T)(i=1,2,3,4).取出4个距离中最小的dmin(X,Y),规定如果dmin(X,Y)>2,则说明样品不属于4类中任何一类若,dmin(X,Y)≤2则说明样品属于4类中欧氏距离最小的那一类。例如输入样品sample1.jpg原始图像为(a),经MATLAB软件预处理后图像为(b)与模板一(num1.jpg)图像(c)相同,见图3.数据结果处理结果如下:
D=0.015211.33826.53698.5498
y=0.0152
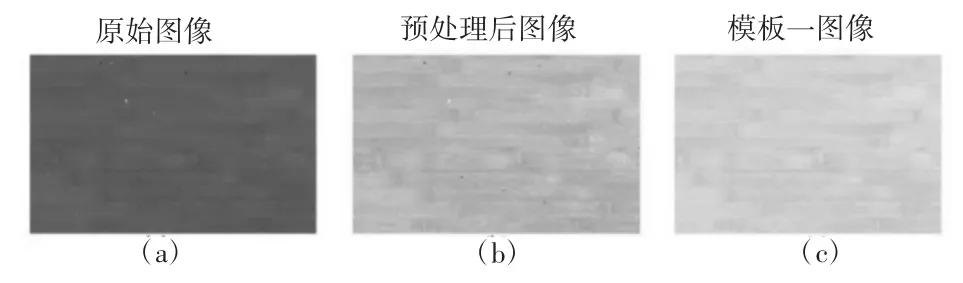
图3 识别结果
欧氏距离计算数据显示与模板一距离最短,样品属于模板一图像代表的第一类竹片,分类成功。本设计选取了四类共100片竹片样本进行了分选实验,实验结果见表1.系统的平均识别率达到86%.对颜色较浅的一类和二类的竹片识别率较高,达到了95.9%,表明该系统是可行和有效的。
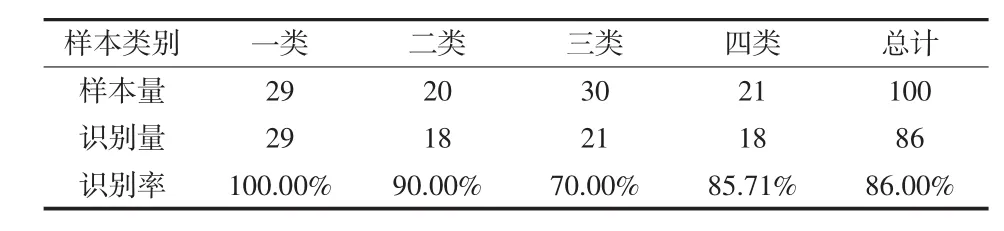
表1 竹片样本分选实验数据表
4 结论
上述分析表明,虽然同种类竹片的颜色差别比较小,但由于L*a*b*颜色空间的均匀性、等距性和高分辨率的优点能充分表征竹片的颜色特征,其19维的特征向量提取值能够充分反映竹片颜色微小差异,再结合运算速度较快的距离测度模板匹配法的模式识别技术,使本设计能够完全适应竹片分拣过程中快速识别分拣的需求,解决了人工分类的繁琐,精确度不高的问题,实现了机器视觉技术对竹片颜色的在线自动选片分拣。
猜你喜欢
林业科学(2022年6期)2022-10-15
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
东北林业大学学报(2021年9期)2021-11-03
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26
中成药(2017年10期)2017-11-16
智能系统学报(2017年5期)2017-01-22
中国市场(2016年45期)2016-05-17
海军航空大学学报(2015年1期)2015-11-11
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
智能系统学报(2015年3期)2015-01-29