
三相四桥矩阵变换器非平衡负载运行特性研究
2018-07-10 04:51黄松涛郭有贵许烈
电机与控制学报 2018年6期
黄松涛 郭有贵 许烈
摘 要:为克服传统的三相三桥矩阵变换器无法实现带不平衡负载的缺陷,提出采用三相四桥矩阵变换器输出带不平衡负载的新型控制策略。首先,采用三维立体空间矢量的调制策略,实现三相四桥矩阵变换器带三相平衡负载的能力。接着,通过对负载电流的正负零序分离,提出三相四桥矩阵变换器带三相不平衡负载的控制算法。其次,仿真验证了所提出的三维立体空间矢量调制方法和负载电流正负零序分离算法的正确性。最后,在搭建的高度集成的三相四桥矩阵变换器平台上验证所提出的控制策略。仿真和实验结果表明,所提出的控制策略实现了三相四桥矩阵变换器输出带不平衡负载的能力。
关键词:三相四桥矩阵变换器;正负零序分离;不平衡负载;三维空间矢量调制;新型控制策略
中图分类号:TM 46
文献标志码:A
文章编号:1007-449X(2018)06-0001-10
Abstract:In order to overcome the shortcomings of traditional threeleg matrix converter (3LMC) with unbalanced load, a new control strategy for output unbalanced load with threephase fourleg matrix converter (4LMC) is proposed. Firstly, a modulation method based on threedimensional space vector modulation (3DSVM) was proposed to realize the capability of 4LMC to output threephase balanced load. Then, through the positive and negative zero separation of the load current, the control strategy for 4LMC with threephase unbalanced load was proposed. Secondly, the correctness of the proposed 3DSVM method and the load current positive and negative sequence separation algorithm were verified by simulation. Finally, the proposed control strategy was validated on a highly integrated 4LMC platform. The simulation and experimental results showed that the proposed control strategy achieves the capability of 4LMC with output unbalanced loads.
Keywords:threephase fourleg matrix converter; positive and negative zero separation; unbalanced load; threedimensional space vector modulation; new control strategy
0 引 言
矩阵变换器具有功率密度高、能量双向流动、输入单位功率等优点,一直备受国内和国外学者的广泛关注。在实际的生产生活中,矩阵变换器已经应用于航空电力电子、电机控制,风力发电等领域[1-5]。
然而,传统的三相三桥矩阵变换器无法实现带不平衡负载的能力,大大地限制了其应用范围。在某些特殊的应用领域中,存在非平衡负载驱动需求,所以就需要一种新的拓扑结构去解决实际应用的问题。
传统的三相三桥矩阵变换器带不平衡负载时,零序电流会在中性点处产生电压漂移,导致输出的三相电压不再是对称的三相电压。文献[6]提出对输出电压的正、负序分量分别进行PI闭环控制,而在输出侧接入Δ/Y变压器抑制零序电压。缺点是增加了额外的变压器,造成矩阵变换器的成本和系统的体积增加。
应用在三相四桥矩阵变换器带不平衡负载的方法目前主要集中在模型预测控制和重复控制。文献[7-8]通过数学推导构建的控制器,虽然实现了三相四桥矩阵变换器输出带不平衡负载的能力,但是计算过于复杂。文献[9-11]通过优化高次谐振控制器的系统参数,实验验证了该控制系统在非线性不平衡和平衡负载下具有良好的性能。文献[12-14]提出基于预测电流控制策略,实验结果表明可以得到可选择的输出电压和电流。文献[15]提出一种混合重复控制系统,二次控制器改善了系统的动态性能,重复控制器改善整个系统的性能,实验表明整个系统可以实现带非线性负载。文献[16]设计了一种时变重复控制系统,通过线性插值方法注入合适的谐波,抑制了低频谐波,相比于传统的重复控制器具有更高的精确性和抑制谐波的能力。
通过对上述已有的对输出带三相不平衡负载控制策略的讨论,基于三相四桥直接型矩阵变换器,考虑负载电感上负序和零序的压降,将负载电流进行正负零序分离。
1 4LMC拓扑结构及矢量调制
三相四桥矩阵变换器拓扑结构如图1所示。
4LMC是由12个双向开关组成的3×4的矩阵式阵列,每个双向开关都是由IGBT和二极管反并联构成。双向开关采用集电极-发射极连接方式,使得杂散参数更小。另外,考虑到上电过程和断电过程中输入级和输出级产生的電压尖峰对IGBT双向开关的冲击,在输入侧和输出侧分别加了二极管钳位电路和电压吸收电路。
根据矩阵变换器输入级不能短路,输出级不能开路的原则,4LMC共存在34=81种开关状态。输出线电压矢量和输入相电流矢量在空间中的分布位置由其相应的开关状态决定。其中有14个有效非零电压矢量具有固定的方向,如图2所示。
基于三维立体空间矢量调制策略,将输入电流划分为6个扇区,输出电压划分6个扇区。每个输出电压扇区由6个三棱柱分别在α-β坐标系投影所得。每个三棱柱由对应4个四面体组成,故共有144种组合[18]。
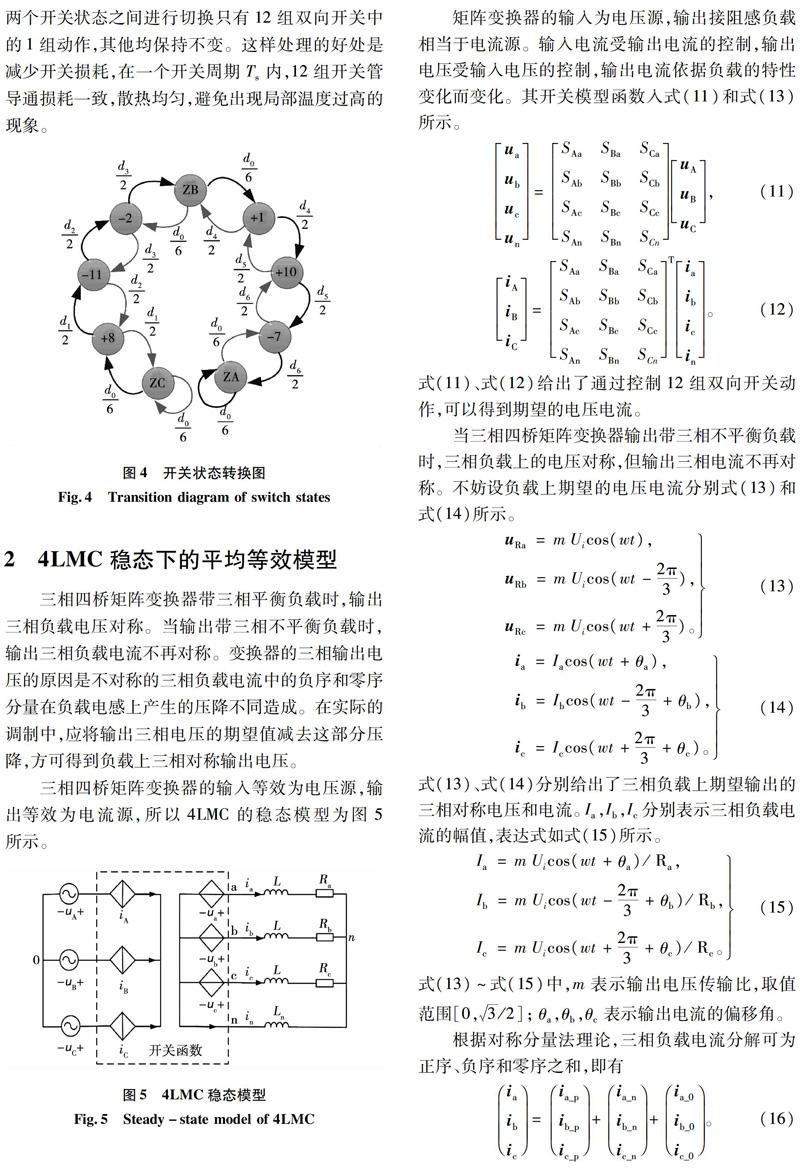
以电流矢量所在第6扇区,输出电压矢量所在第1扇区和所在四面体编号3为例,给出了三维空间矢量调制开关序列时序图,如图4所示。
在6个有效开关状态之间插入3个零矢量,每两个开关状态之间进行切换只有12组双向开关中的1组动作,其他均保持不变。这样处理的好处是减少开关损耗,在一个开关周期Ts内,12组开关管导通损耗一致,散热均匀,避免出现局部温度过高的现象。
2 4LMC稳态下的平均等效模型
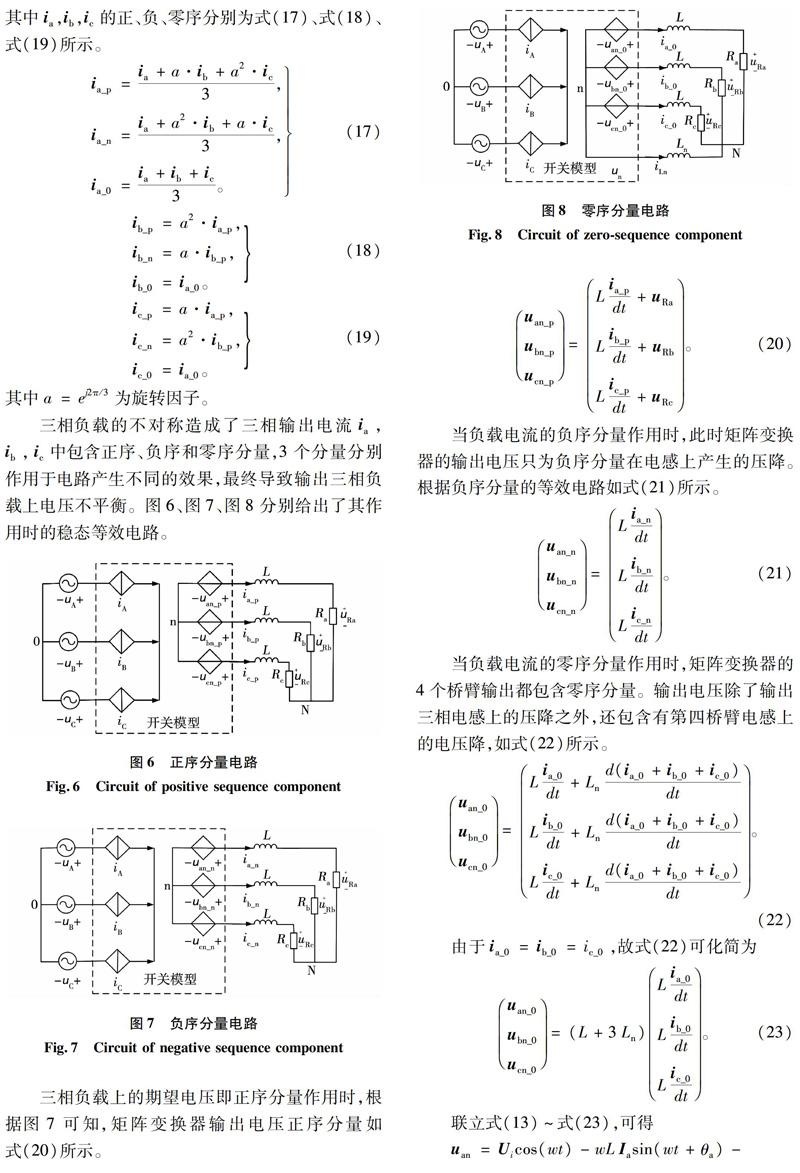
三相四桥矩阵变换器带三相平衡负载时,输出三相负载电压对称。当输出带三相不平衡负载时,输出三相负载电流不再对称。变换器的三相输出电压的原因是不对称的三相负载电流中的负序和零序分量在负载电感上产生的压降不同造成。在实际的调制中,应将输出三相电压的期望值减去这部分压降,方可得到负载上三相对称输出电压。
三相四桥矩阵变换器的输入等效为电压源,输出等效为电流源,所以4LMC的稳态模型为图5所示。
矩阵变换器的输入为电压源,输出接阻感负载相当于电流源。输入电流受输出电流的控制,输出电压受输入电压的控制,输出电流依据负载的特性变化而变化。其开关模型函数入式(11)和式(13)所示。
式(11)、式(12)给出了通过控制12组双向开关动作,可以得到期望的电压电流。
当三相四桥矩阵变换器输出带三相不平衡负载时,三相负载上的电压对称,但输出三相电流不再对称。不妨设负载上期望的电压电流分别式(13)和式(14)所示。
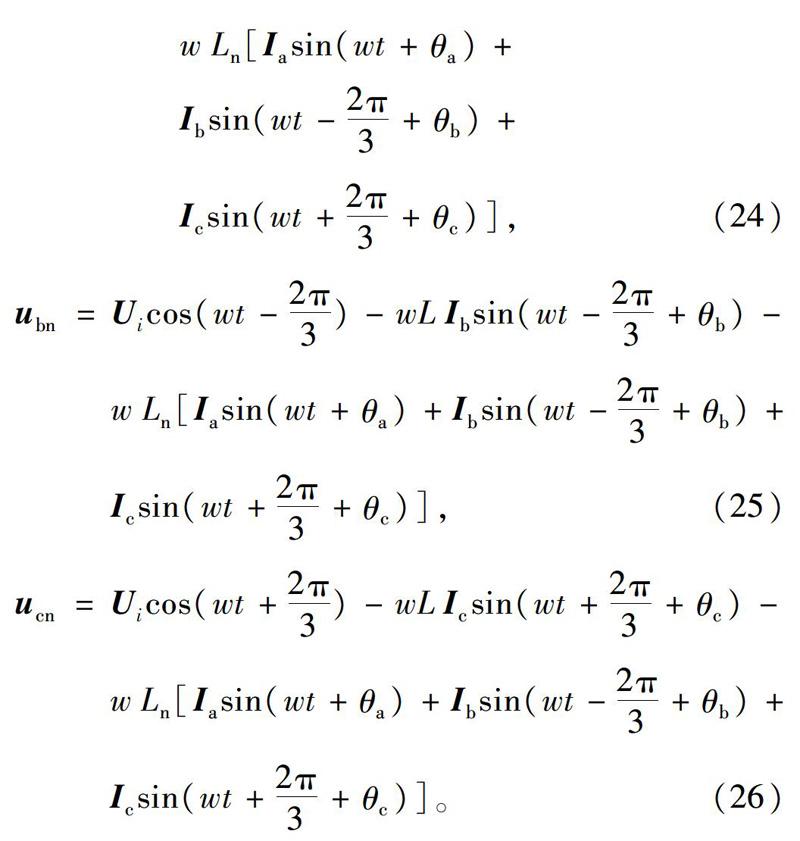
至此,基于对称分量法理论,分离三相四桥矩阵变换器输出带不平衡负载时所产生的正序、负序和零序电流成分,得到了三相四桥矩阵变换器期望的输出三相电压。
3 仿真结果及分析
3.1 平衡负载
为了验证所提出的基于三维立体空间矢量调制策略的正确性。在Matlab/SIMULINK中搭建了三相四桥矩阵变换器主电路及控制系统模型,编写了S函数完成矢量调制,仿真参数如表1所示。
图9、图10、图11、图12分别给出了三相输出电压电流、三相负载电阻上电压之和、输入相电压相电流的仿真结果。
图9、图10、图11分别给出了三相输出负载电压、三相输出电流的仿真波形、输入相电压相电流的仿真波形。从给出的仿真结果可以看出,当三相负载对称时,调制策略使得负载上输出的三相电压和三相电流对称,波形良好。第四桥臂电流in在0附近波动,约为0 A。图11给出经过合理设计的RLC输入滤波器之后,矩阵变换器的输入电压和输入电流同基本相位,表明矩阵变换器输入单位功率因数,对电网的影响较小。仿真结果验证了三维立体空间矢量调制策略的正确性。
3.2 非平衡负载
为了验证所提出的基于负载电流正负零序分离的三维立体空间矢量调制策略的正确性,在Matlab/SIMULINK中搭建了三相四桥矩阵变换器输出带不平衡负载的仿真模型,编写了基于负载电流正负零序分离的三维立体空间矢量调制策略的S函数的矢量调制算法,仿真参数如表2所示。其中,负载参数的选择主要是依据实验室现有的条件,选择合适的电阻和电感,验证所提出的控制控制算法在三相四桥矩阵变换器输出带非平衡负载条件下的运行特性。
图12、图13、图14、图15分别给出了三相输出电压、三相输出电流、三相负载电阻上电压之和、输入相电压相电流的仿真結果。
图12给出了三相四桥矩阵变换器在负载不对称时的三相负载上的电压波形,结合图14可以看出,三相负载电压之和稳定在0V附近小范围的波动,三相电压呈正弦波形且基本对称。图13中给出了输出电流的波形,呈正弦波。由于设定的期望输出电压三相对称平衡,所以输出a相电流幅值为b、c相的一半。电流零序分量在第四桥臂流通,呈正弦波。仿真结果满足基尔霍夫电流定律,即ia+ib+ic+in=0。图15表明三相四桥矩阵变换器满足单位功率因数输入。
综上所述,三相四桥矩阵变换器实现了带三相平衡和非平衡负载的能力,仿真验证了所提的基于三维立体空间矢量调制策略和基于负载电流正负零序分离的三维立体空间矢量调制策略的正确性。
4 三相四桥矩阵变换器实验系统
三相四桥矩阵变换器实验系统框图如图16所示。
该系统采样了3路输入电压信号,其中直流电压做过压保护使用;采样了4路输出线电流信号,送FPGA作为四步换流使用。DSP28377主要完成数据的计算和处理,FPGA主要完成四步换流和过压过流保护。两者之间通过DSP的XINTF7进行并行通信,完成数据从DSP写向FPGA。FPGA计算输出的24路PWM信号经过光纤电路调理电路板,送给驱动模块,完成双向开关的导通与关断。
研制了一套高功率密度的三相四桥矩阵变换器实验平台,主要由主电路和控制模块组成。其中主电路长41厘米宽56厘米,集中有输入输出模块,双向二极管钳位吸收电路、3路电压检测、4路电流检测模块、12组开关阵列、12组IGBT驱动模块。如图17、图18所示。
矩阵变换器的输入端为三相交流电压,输出分别接上RL负载,其中第四桥臂只接电感。为降低负载中性点上的共模电压的幅值,第四桥臂电感的值和负载电感的值相等。为提高功率密度,将整个主电路制作在一块电路板上,驱动电路采用即插即用的方式。驱动信号采用光纤传输的方式,速度快,抗干扰能力强。控制系统由数字信号处理器TMS320F28377和现场可编程门阵列控制器MAX10组成,共同完成三相四桥矩阵变换器的空间矢量调制和四步换流。考虑到双向开关的关断电压尖峰的存在,通过在4LMC的输入输出端分别加上二极管钳位吸收电路。同时,为实现并网,在4LMC的输入端接上RLC滤波器。矩阵变换器单位功率因素输入的特点,对电网的污染较小。
5 实验结果及分析
实验中所用的双向开关管型号为Microsemi公司的模块化开关APTG150DU120TG。该开关管完全开通时间是170 ns,完全关断时间是330 ns。设定开关频率5 kHz,输入线电压40 V,四步换流换流时间总长4.2 μs,输出电压频率50 Hz,其它参数和仿真参数完全一致。实验所用示波器为YOKOGAWA DLM2404,该示波器自带波形编辑软件Xviewer177。
5.1 平衡负载
图19(a)、图19(b)分别给出了输入B相电压电流、四桥臂输出电流波形的实验结果。
从图19(a)实验中所测得的输入电压电流基本同相位且为正弦波,波形良好。电压电流同相位满足单位功率因数输入。图19(b)中三相负载输出上的电流为正弦波,相位互差120°,幅值相等,约为2.0 A左右。第四桥臂电流in幅值在0附近波动,实验结果正确,验证了提出的基于三维立体空间矢量调制策略的正确性。
5.2 非平衡负载
图20(a)、图20(b)分别给出了三相四桥矩阵变换器在输出接三相不对称负载条件下的输入电压电流、四桥臂输出电流的实验结果。
从图20(a)实验中所测得的输入电压电流基本同相位,波形正弦且对称,满足单位功率因数输入。从图20(b)中知输出电流ia和in波形不完全重合,由于实际电路的参数导致的结果,误差在可接受的范围之内,与仿真结果相差不大且幅值约为ib,ic幅值的一半。ia,ib,ic为正弦波,相位互差120度,实验结果正确。实验验证了提出的基于负载电流正负零序分离的三维立体空间矢量调制策略的正确性。
综合图19、图20的实验结果,验证了提出的控制算法,实现了三相四桥矩阵变换器输出带平衡和非平衡负载的能力。
6 结 论
本文重点研究了三相四桥直接型矩阵变换器输出带不平衡负载的控制方法,提出了基于负载电流正负零序分离的三维立体空间矢量调制策略。仿真和实验证明,所提的控制方法正确有效。本文提出的控制方法,简单而高效,可推广到输出侧接任何不对称电感和电阻的场合。尤其是在对变频器体积要求小、对电网污染小、输出带不平衡负载等领域具有较大的优势,为三相四桥矩阵变换器的实际工程应用打下坚实基础。
参 考 文 献:
[1] 韩娜,周波,秦显慧,等. 全双向开关型双级矩阵变换器逆变级容错策略 [J]. 中国电机工程学报,2017, 29(1):1.
HAN Na, ZHOU Bo, QIN Xianhui, et al. Faulttolerant modulation strategy for inverter stage of full bidirectional switches two stage matrix converter[J]. Proceedings of the CSEE, 2017, 29(1):1.
[2] 夏长亮, 阎彦. 矩阵变换器-永磁同步电机系统[J].电工技术学报, 2015, 30(23):2.
XIA Changliang, YAN Yan. Matrix converter permanent magnet synchronous motor drives [J]. Transaction of China Electrotechnical Society, 2015, 30(23):2.
[3] 宋鹏,夏长亮,阎彦,等. 矩阵变换器-永磁同步电机驱动系统静态稳定性分析[J]. 中国电机工程学报, 2011, 31(4): 58.
SONG Peng, XIA Changliang, YAN yan, et al. Static stability analysis of matrix converterpermanent magnet synchronous motor drive system[J]. Proceedings of the CSEE,2011, 31(4):58.
[4] 粟梅, 张关关, 孙尧,等. 减少间接矩阵变换器共模电压的改进空间矢量调制策略[J].中国电机工程学报,2014, 34(24):4015.
SU Mei, ZHANG Guanguan, SUN Yao,et al. Improved space vector modulation to reduce the common mode voltage for indirect matrix converters[J]. Proceedings of the CSEE, 2014, 34(24):4015.
[5] CARDENAS R, JURI C, PENA R,et al. The application of resonant controllers to fourleg matrix converters feeding unbalanced or nonlinear loads[J]. IEEE Transactions on Power Electronics, 2012, 27(3):1121.
[6] 鄧文浪,杨欣荣,朱建林.不平衡负载情况下基于双序dq坐标系双级矩阵变换器的闭环控制研究[J].中国电机工程学报,2006, 26(19):71.
DENG Wenlang, YANG Xinrong, ZHU Jianlin. Study of closed loop control based on double synchronous rotating frame for twostage matrix converter under unbalanced load[J]. Proceedings of the CSEE, 2006, 26(19):71.
[7] CARDENAS R, PENA R, WHEELER P. Experimental validation of a spacevectormodulation algorithm for fourleg matrix convers[J]. IEEE Transactions on Industrial Electronics, 2007, 22(2):544.
[8] ROBERTO C, CARLOS J, JON C. The application of resonant controllers to fourleg matrix converters feeding unbalanced or monlinear loads[J]. IEEE Transactions on Industrial Electronics, 2012, 27(3): 1120.
[9] CRDENAS R,JURI C,PEA R,et al.The application of resonant controllers to fourleg matrix converters feeding unbalanced or nonlinear loads[J]. IEEE Transactions on Industrial Electronics, 2012,27(3):1120.
[10] CRDENAS R, JURI C, PEA R,et al. Analysis and experimental validation of control systems for fourleg matrix converter applications[J]. IEEE Transactions on Industrial Electronics,2012, 59(1):141.
[11] WHEELER P, ZANCHETTA P,CLARE J,et al.Utility power supply based on a fouroutput leg matrix converter[J].IEEE Transactions on Industrial Electronics, 2008,44(1):174.
[12] GARCIA C, RIVERA M, LOPEZ M,et al.Predictive current control of a fourleg indirect matrix converter with imposed source currents and commonmode voltage reduction[C]//Proceedings of Energy Conversion Congress and Exposition, 2016:5306.
[13] CHE Ruyu, ZHAO Ziyi, JIANG Li,et al.Enhancing the current quality of fourleg direct matrix converter under unbalanced loads[C] // Proceedings of the 35th Chinese Control Conference, 2016: 8765
[14] HAN Hua, LI Zhejun, MAO Yongmei,et al.A simple current control strategy for fourleg direct matrix converter[C]//Chinese Automation Congress,2015:2174.
[15] ROHOUM A M, EMPRINGHA M L, ZANCHETT A P,et al. A four legs matrix converter based ground power unit with selective harmonic control[J].IEEE Transactions on Industrial Electronics,2015, 62(4):799.
[16] HAN Na, ZHOU Bo, QIN Xianhui,et al. Neutral current harmonic analysis and inhibition for twostage fourleg Matrix converter[C]//40th Annual Conference of the IEEE Industrial Electronics Society, 2014:4860.
[17] LIU Zeng, LIU Jinjun,LI Jin. Modeling, analysis, and mitigation of the load neutral point voltage for threephase gourleg inverter[J]. IEEE Transactions on Industrial Electronics, 2016, 60(5):2011.
[18] RICHARD Z,PRASD H, BOROYEVICH D,et al.Threedimensional space vector modulation for fourleg voltagesource conveters [J]. IEEE Transaction on Power Electronics, 2002, 17(3):315.
(編辑:贾志超)
