
一种用于破片测速的环形光幕装置
2018-07-10 03:39金朋刚田亚男
测试技术学报 2018年4期
田 会,金朋刚,田亚男,袁 云
(1. 西安工业大学 光电工程学院,陕西 西安 710021; 2. 中国兵器工业集团 第二〇四研究所,陕西 西安 710061)
0 引 言
在各类身管武器以及战斗部的研制和生产中,为有效评判该类武器的毁伤效能,需准确测量弹丸或破片在特定位置的飞行速度[1-3]. 传统测速方法大多采用区截测速原理,在预定弹道线上间隔一定距离放置两台探测器,通过测量弹丸穿过两个探测器的时间,依据定距测时原理计算出弹丸飞行速度,光电探测设备具有响应时间快、探测灵敏度高、非接触测试等优点,已成为主力测试装置,现有光电类探测器包括天幕靶、光幕靶以及激光靶等[4,5]. 在战斗部静爆时,会产生沿任意方向飞行的破片,若使用上述探测装置来测量破片飞行速度将具有一定的局限性,其主要表现在破片在铅垂面上沿任意角度飞行,穿过两个光幕间的飞行距离大于预先测量的垂直距离,测量速度存在较大误差; 现有探测装置形成的探测面为平面,其视场有限,对任意方向飞行的破片存在较高的漏测率[6,7]. 通过在破片飞行四周区域放置多套探测装置来提高捕获率的方法[8]需耗费较多人力、物力,且实验现场设备布放繁琐. 为了解决上述问题,本文提出一种探测面为环形的光幕测速装置,以实现在水平面内任意方向飞行的破片速度测量.
1 探测光幕的形成与工作原理
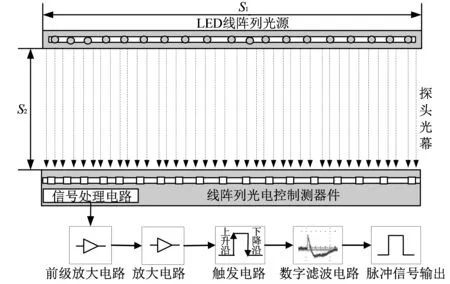
图 1 矩形探测光幕的典型构成方式Fig.1 The typical composition of rectangular detection light screen
光源、接收装置、信号处理电路以及支撑结构在空间形成非接触式探测光幕[9]. 常用的探测光幕有矩形光幕和扇形光幕,光幕面为具有一定厚度的平面. 图 1 为典型的光幕探测器构成形式,长为S1的LED线阵列光源发出的光能被距离为S2与其相向安装的线阵列光电探测器件接收,在空间形成探测面积为S1S2的矩形探测光幕. 飞行弹丸从该探测光幕内任意位置穿过时,引起部分光电探测器件接收的光能量变化,输出微弱变化的电信号,该信号经前级放大电路及放大电路处理输出幅值不小于3 V的模拟信号; 触发电路将模拟信号转换为脉冲信号,其中脉冲信号的上升沿对应弹丸开始进入光幕的时刻,下降沿对应弹丸完全离开光幕的时刻; 数字滤波电路根据干扰信号与弹丸过幕信号在时间宽度上的差异[10],滤除弹头激波和蚊虫等产生的干扰信号,提高探测器工作的可靠性,最终输出的脉冲信号传输给后续测时装置.
在对飞行轨迹已知的破片测速时,因破片的散布区域较大,为有效获取破片穿过探测光幕的信号幅值,需制作具有更大探测光幕的测速装置. 当通过增加光源与探测器件的数量及增大光源与探测器件之间距离的方式来实现较大的探测光幕时,随着光源与探测器件之间的距离增大,到达光电转换器件上的光通量随之减少,最终导致探测装置的探测灵敏度、频率响应特性、可靠性急剧下降. 因此,传统矩形或扇形探测光幕无法满足飞行方向与轨迹不确定的破片测速要求.
2 环形光幕靶结构设计
为实现在有效探测区域内无遗漏的对任意方向飞行破片测速,研究了环形光幕靶. 采用直径为 5 mm,发光波长为940 nm,发光立体角为15°的子弹头形LED,按照一定的安装角度和距离构成如图 2 所示半径为R的环形LED阵列; 使用外形尺寸、响应波长、视场角与光源相匹配的光电探测器件作为接收器件,其安装方式与光源的安装方式相对应如图 3 所示,为半径为R的环形接收器件阵列. 环形阵列中的每个LED的法线均指向对应位置接收器件的中心.
如图 4 所示,接收器件阵列按照特定距离与角度排布呈环形,接收LED发出的光能时,单个接收器件与环形LED阵列存在一定的几何关系.
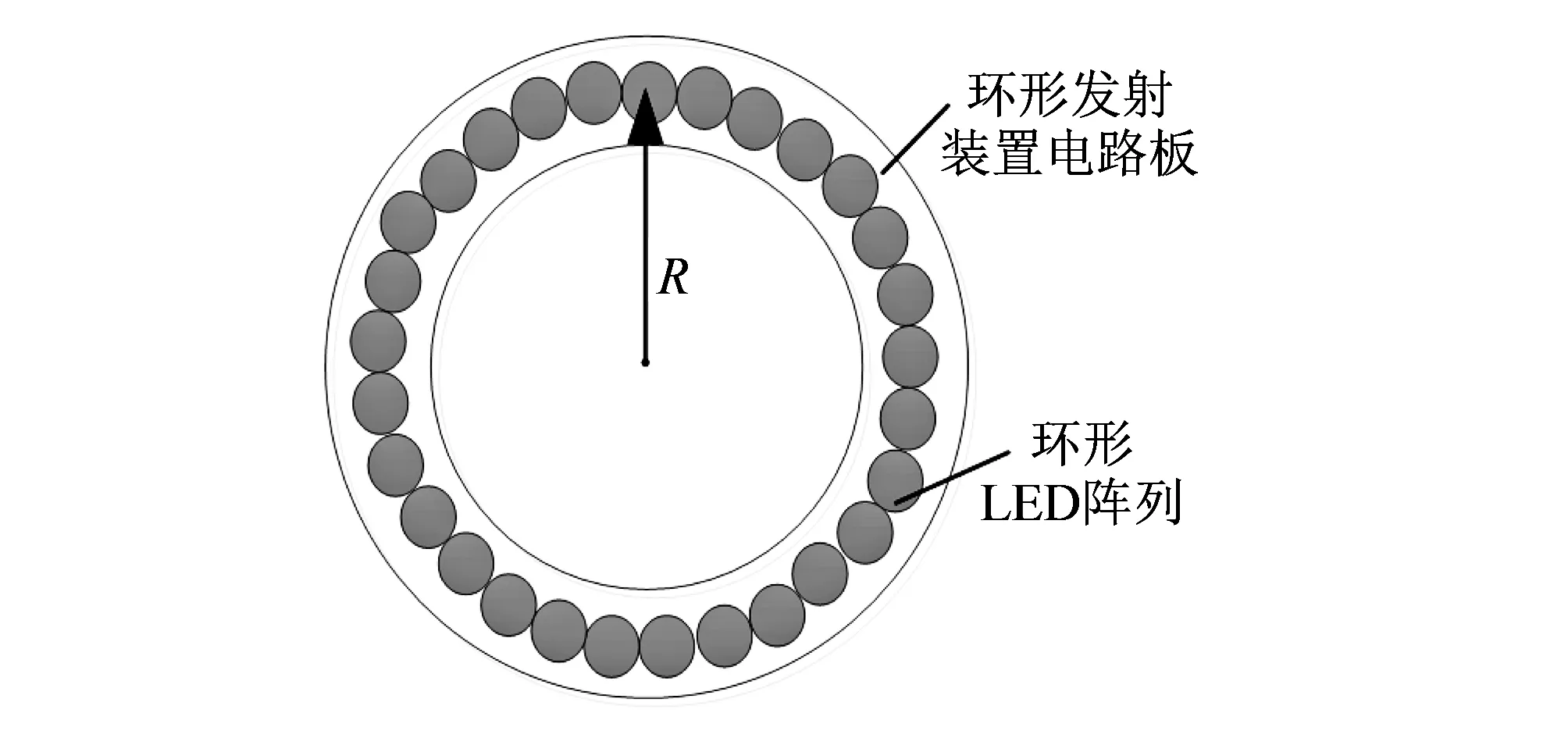
图 2 环形光源阵列示意图Fig.2 The schematic diagram of circular ring light source array

图 3 环形接收阵列示意图Fig.3 The schematic diagram of circular ring received device array
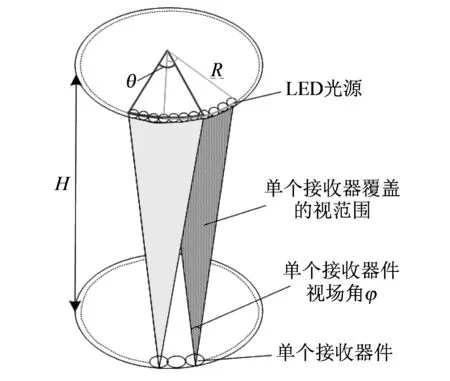
图 4 单个接收器覆盖光源范围几何示意图Fig.4 The geometric schematic diagram of signal received device covers the light range
单个接收器件经狭缝光阑限制后的视场角为φ,同一规格的每个接收器件在空间的视场范围均相等,结合图 4 中的几何关系可计算出单个接收器件视场在环形LED阵列中对应的圆心角θ为
(1)
圆心角θ所对应的弧长上LED数目为
(2)
式中:d为单个接收器件的直径. 单个接收器件所接收到的光照度值为
(3)
式中:Eall为单个接收器件所接收到的光照度值;I(λ)为单个LED的发光强度;M为单个接收视场所覆盖的LED数目.

图 5 环形探测光幕面内的光能分布示意图Fig.5 The schematic diagram of light energy distribution in circular ring detection light screen
依据上述公式,结合LED与接收器件安装特点分析可知:当使用同一规格的LED与接收器件时,每个接收器件在环形LED阵列上所覆盖的弧长均相等 ,即环形接收器件阵列中每个接收器件的视场所覆盖LED的数目均相等. 因LED的发光强度一致且互不干扰,依据距离平方反比定律[11],在距离光源H处的单个接收器件所接收的光照度为其视场所覆盖的LED光照度的叠加,即环形接收阵列上每个接收器件所接收到的光照度值均可用式(3)表示,整个环形探测光幕面的光能量分布如图 5 所示.
与传统矩形探测光幕相比,该方式形成的环形探测光幕其光能量在探测面分布均匀,探测灵敏度幅值差异小,可完全消除传统矩形探测光幕因两端光能衰减引起探测灵敏度差异大的缺陷[12].
3 环形探测光幕的设计
环形光幕靶整体结构如图 6 所示,主要由同圆心的内侧环形光源与内侧环形接收装置及外侧环形光源与外侧环形接收装置组成. 各部分装置分别通过连杆相向安装于上水平面、下水平面上,在空间形成内侧圆柱形探测光幕面(即启动探测光幕)、外侧圆柱形探测光幕面(即停止探测光幕),构成了接收与发射一体化的环形光幕靶,在空间形成密实的圆柱形光幕探测面.
对战斗部爆炸所产生的破片进行测速时,将待测战斗部放置于环形光幕靶装置的圆心轴处载物台上,当战斗部爆炸所产生的任意方向飞行的破片先后穿过同圆心不同半径的内、外侧圆柱形探测光幕,可遮挡部分到达接收器件光敏面上的光能量,由信号处理电路输出对应破片过幕的信号幅值. 设计的环形光幕靶中的信号处理电路与现有的XGK-2002型光幕靶电路相同[13,14],因此,设计的环形光幕靶可直接使用. 当多个破片同时穿过内侧或外侧圆柱形探测光幕面时,信号处理电路仅能输出1个过幕信号,无法对信号进行有效配对,因此也不能准确计算每个破片的速度,仅能大致测量出多个破片的平均飞行速度.

图 6 环形光幕靶装置示意图Fig.6 Schematic diagram of circular ring detection light screen device
一体化的环形光幕靶其整体结构更为紧凑、成本低廉,内、外侧圆柱形探测光幕面间的固定连杆确定了两个探测光幕的间距,减少了靶距测量带来的误差,提高了探测精度. 通过改变固定连杆2的长度,可调节光源与接收装置的距离,增大探测靶面,满足有效探测靶面大且全方位无死角的探测需求.
4 结 论
针对现有平面形光幕探测装置无法测量任意方向飞行的破片速度问题,本文设计了一种环形光幕靶装置. 环形光幕靶在空间中形成内、外侧两个圆柱形光幕探测面,可测量空间任意方向飞行破片的速度; 采用环形发光二极管阵列配接对应的环形光电接收器件阵列构成的环形探测光幕,光能量在同一高度上分布均匀,幕面内任意位置的探测灵敏度相同,消除了传统光幕面两端探测灵敏度逐步减弱的不足; 该装置的光源和接收装置通过连杆固定连接,结构简单,易于工程实现.
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13
爆炸与冲击(2022年3期)2022-04-11
小学生必读(中年级版)(2021年12期)2021-12-02
兵器装备工程学报(2020年3期)2020-04-22
家庭影院技术(2019年8期)2019-08-27
西安工业大学学报(2018年5期)2018-11-26
中国测试(2018年10期)2018-11-17
航天制造技术(2018年4期)2018-09-04
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
