
面向多层级信息融合的液压泵故障诊断系统设计
2018-07-03 10:41刘振宇
机械设计与制造工程 2018年6期
刘振宇
(天津现代职业技术学院,天津 300350)
液压系统是现代设备的关键组成部分,具有体积小、功率质量比大、运行平稳、响应速度快以及控制精度高等特点[1]。作为液压系统的核心部件之一,液压泵发挥着动力源的作用,一旦发生故障,直接影响到设备性能[2]。与传统机械设备不同,液压泵由于流体的压缩性以及自身固有的机械振动,其故障具有隐蔽性、交错性、随机性以及差异性等特点,故障诊断准确率较低。此外,现有诊断系统多是基于单一知识推理或是专家经验,缺乏对融合思想的运用,造成实际诊断效果不佳,影响了设备的维修和保障工作。
为此,本文引入信息融合思想[3],探索一种面向多层级信息融合的液压泵故障诊断系统设计方法,充分利用不同层级的各类信息,改善液压泵故障诊断的实际效果。
1 液压泵工作原理与故障模式
液压泵(如图1所示)在实际运转中,柱塞通过往复运动,不断改变回位套筒与柱塞间的封闭空间容积,完成液压泵的周期性吸油和排油动作。
液压泵的典型故障模式主要有松靴、滑靴磨损、斜盘磨损等[4-5]。松靴是液压泵最为常见的故障模式,由于长时间运转,柱塞球头与滑靴靴帽之间配合间隙超过正常距离时,即形成了松靴。滑靴磨损和斜盘磨损也是液压泵比较常见的故障模式。液压泵在运转过程中,靴帽和斜盘间的油膜变薄,导致滑靴与斜盘直接接触,造成划痕和磨损。
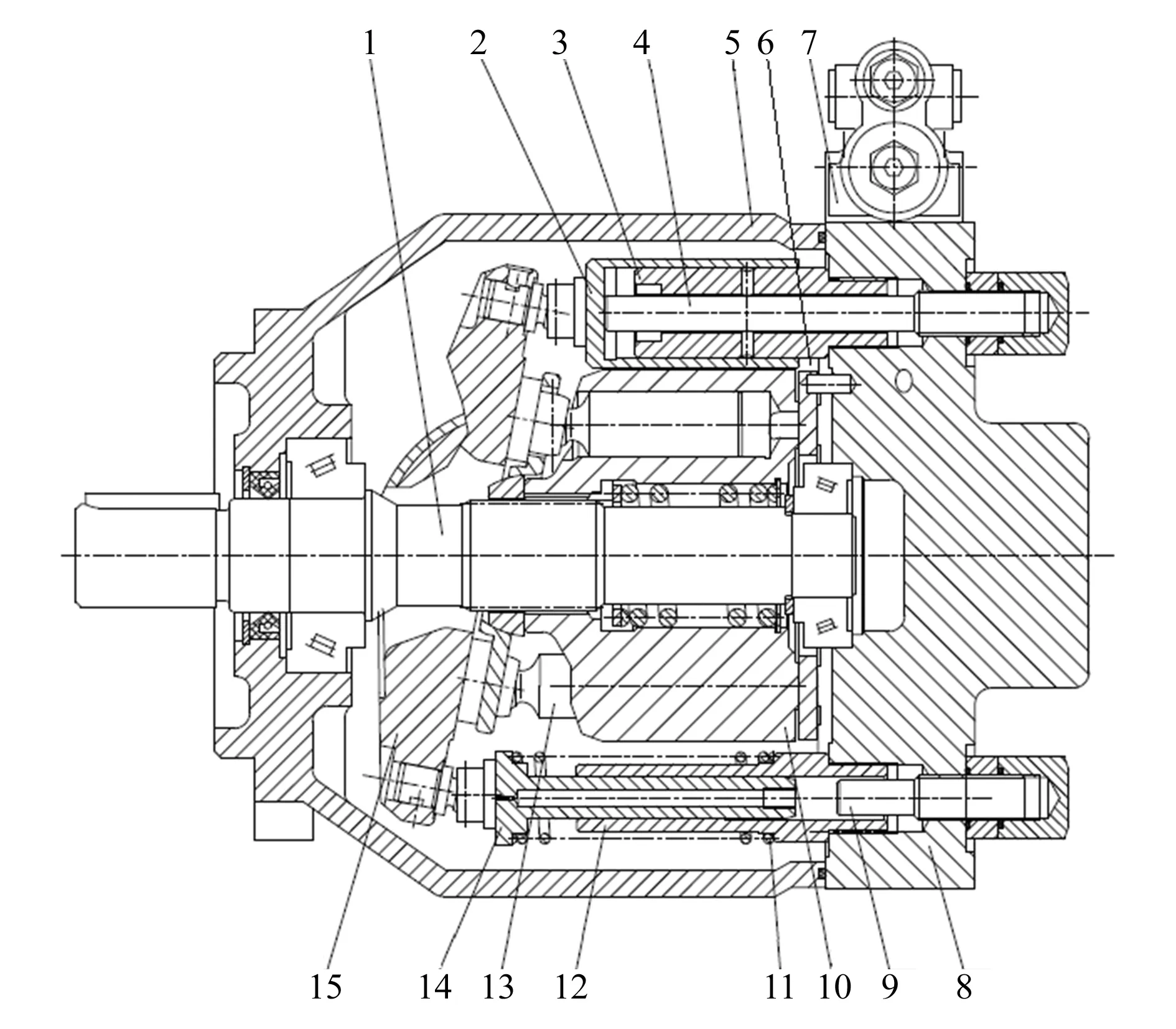
1—主轴;2—变量活塞;3—活塞杆;4—大排量限位螺钉;5—壳体;6—配流盘;7—调节阀;8—端盖;9—小排量限位螺钉;10—转子;11—回位弹簧;12—回位套筒;13—柱塞;14—回位活塞;15—斜盘
2 多层级信息融合的必要性分析
与传统机械设备(如轴承)不同,液压泵由于自身的结构特点,依托单一数据源进行的故障诊断效果并不理想[6]。具体来讲,从数据采集层面来看,最能直接反映液压泵工作状况且最易采集的为振动信号,液压泵内部摩擦引起的振动是从多个方向传递至泵壳体的,因此基于单一振动信号进行分析研究可能会造成一些关键故障信息的遗漏,影响故障诊断结果;从特征提取层面来看,传统的时域特征和频域特征无法满足诊断需求,需要利用合适的数据融合技术,将多种特征信息进行有机结合,改善特征参数对性能的描述能力;从诊断决策来看,基于知识的决策方法包含过多主观经验,采用多种识别决策方法相融合的诊断体系才是发展主流。因此,引入信息融合思想探索液压泵故障诊断系统的设计是非常有必要的。
3 液压泵故障诊断系统设计
3.1 系统基本架构
基于信息融合的液压泵故障诊断系统主要包括监测数据采集与输入模块、数据处理模块、特征提取模块、诊断决策模块、知识库模块以及多层级信息融合模块,基本结构如图2所示。
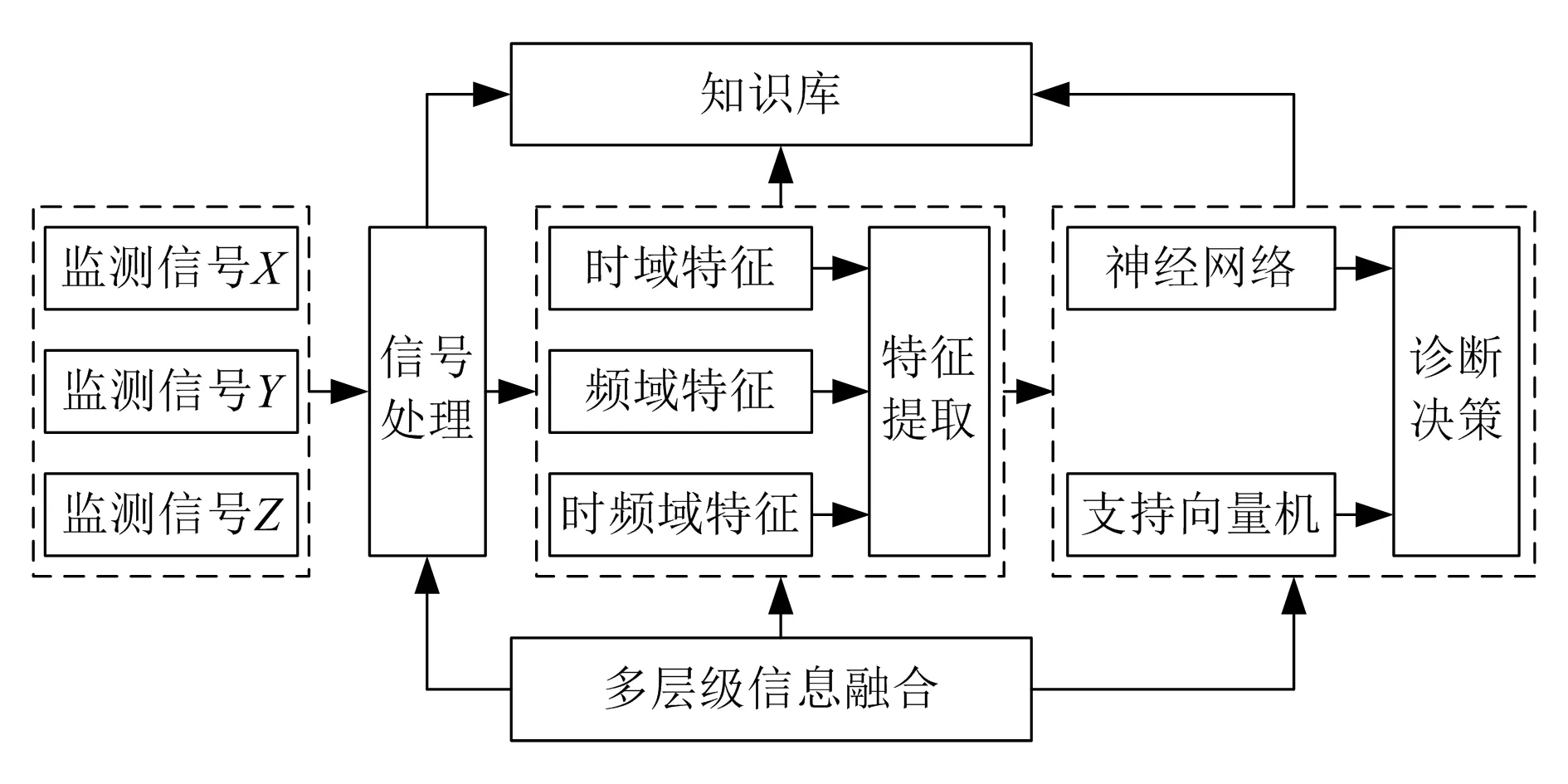
图2 面向信息融合的液压泵故障诊断系统基本架构
从图2可以看出,信息基本流向为监测数据采集与输入模块—数据处理模块—特征提取模块—决策诊断模块,知识库模块和多层级信息融合模块则与上述4个模块相互交互。监测信号经数据采集与输入模块后,进入数据处理模块,对信号进行降噪,调用多层级信息融合库,对多个监测信号进行融合,将结果存入知识库;融合后的信号进入特征提取模块,按照时域、频域以及时频域提取相应的特征参数,调用多层级信息融合模块,对多维特征进行融合降维,将结果存入知识库;融合后的特征进入诊断决策模块,调用多层级信息融合模块,对各类识别方法的结果进行融合判断,得到最终的诊断结果,将结果存入知识库。
3.2 多层级信息融合模式
根据系统的基本架构可知,多层级信息融合主要包括3个层面:
1)数据层融合。该层级是整个诊断系统的基础,必须对每个输入信号的信息进行综合利用,避免遗漏关键信息。由于液压泵的特殊结构,其监测信号具有自身特点,需要借助非线性信号分析算法[7],因此本系统以局部尺度分解[8]为基础,构建数据层融合方法,具体过程如下:①分别对每个输入信号进行分段处理,确定极值点以及对应时刻,利用三次样条函数进行拟合,得到基线函数;②将内禀尺度分量从原始信号中分离,构成内禀尺度分量集合;③依据知识库中的液压泵故障模式,设定筛选因子,衡量各个分量对故障信息的贡献程度;④分别计算每个信号分解所得的内禀尺度分量的筛选因子值,选取具有最大值的分量作为该信号的敏感故障分量;⑤将筛选出的分量信号进行融合重构,得到新的信号,作为数据层融合结果。
2)特征层融合。该层级融合属于中间层次的融合,处理对象特征参数。针对时域、频域、时频域特征的特点,以数据降维方法[9-11]为基础,构建特征层融合方法,具体过程如下:①分别将各个特征参数进行归一化处理,构成特征向量集合;②采用主成分分析法,去除相关性较大的冗余特征参数,保留关键特征参数,重新组成特征向量集合;③计算任意两个特征向量的互信息熵作为关联系数,选取具有最大关联系数的两个向量进行元素的融合重构,形成新的特征参数;④判定剩余信息量是否满足最低诊断信息要求,若符合要求,则继续按上一步进行融合降维处理,若不符合,则输出当前特征向量集作为结果。
3)决策层融合。该层级融合是整个系统最高层的融合,直接决定着最终的诊断结果。以证据理论[12]为基础,构建决策层融合方法,具体过程如下:①将输入的特征向量分为学习样本和测试样本;②利用学习样本分别训练神经网络识别模型以及支持向量机识别模型,确定模型参数;③采用证据理论,对两个识别模型的结果进行分析,判定有无冲突信息,对识别结果进行综合处理,输出最终的诊断结果。
4 实验分析
为了验证本文所构建的液压泵故障诊断系统的效果,以L10VSO28DFR型轴向柱塞式液压泵为实验对象。设置采样频率5 200Hz,采样时间1s,分别对松靴、滑靴磨损以及斜盘磨损3种故障模式各采集100组监测信号样本数据(共300组数据),导入液压泵故障诊断系统,其中每种故障模式下学习样本70组,测试样本30组,最终识别结果见表1。在此基础上,选取松靴故障模式,以柱塞球头与滑靴靴帽之间配合间隙作为指标,作为轻度、中度、重度松靴模式,分别采集100组信号样本,导入液压泵故障诊断系统,其中每种故障模式下学习样本70组,测试样本30组,最终识别结果见表2。

表1 不同故障模式识别结果

表2 不同故障程度识别结果
由表1可知,本文所提出的故障诊断系统,对于不同故障模式的平均诊断识别率为94.4%,由表2可知对于同种故障模式的不同故障程度平均诊断识别率为93.3%。仍采用本文样本,选取单一信号数据,按照局部尺度分解—特征提取—支持向量机的流程,对不同故障模式的诊断识别率为88.9%,对不同故障程度的平均诊断识别率为78.9%,均明显低于本文所提方法。
5 结束语
针对液压泵故障诊断信息来源单一、效果不佳的问题,本文在对液压泵工作原理以及主要故障模式进行分析的基础上,建立了面向多层级信息融合的液压泵故障诊断系统的基本框架,设计了多层级信息融合模式,在改善诊断效果的同时,提高了不同层面信息的利用率;实验结果表明,本文所提方法是有效可行的,为液压设备状态监测提供了一种新的思路和方法。
参考文献:
[1] 湛从昌. 液压可靠性与故障诊断[M]. 北京:冶金工业出版社, 2009.
[2] JARDINE K S Andrew, LIN Daming, BANJEVIC Dragan. A review on machinery diagnositics and prognostics implementing condition-based maintenance [J]. Mechanical System and Signal Processing, 2006, 20(7): 1483-1510.
[3] 杨露菁, 余华. 多源信息融合理论与应用[M]. 北京:北京邮电大学出版社,2011.
[4] 姜万录, 郑直, 朱勇,等. 基于最优扁平型结构元素长度的液压泵故障诊断研究[J]. 振动与冲击, 2014, 33(15):35-41.
[5] 郑直, 姜万录, 朱勇,等. 形态差值滤波及形态指数在液压泵滑靴磨损状态评估中的应用[J]. 振动与冲击, 2015, 34(12): 13-17.
[6] 黄兵峰, 沈路, 周晓军,等. 基于形态非抽样小波分解的滚动轴承故障特征提取[J]. 农业机械学报, 2010,41(2):204-207.
[7] 任亚飞, 柯熙政. 多小波基多尺度多传感器数据融合[J]. 传感器与微系统,2010,29(9):77-82.
[8] 程军圣, 郑近德, 杨宇. 一种新的非平稳信号分析方法——局部特征尺度分解法[J]. 振动工程学报, 2012,25(2):215-220.
[9] 吴胜强, 姜万录. 基于证据理论多源多特征融合的柱塞泵故障诊断方法[J]. 中国工程机械学报, 2011,9(1):98-102.
[10] 谢平. 故障诊断中信息熵特征提取及融合方法研究[D].秦皇岛:燕山大学, 2006.
[11] 朱玉鹏, 付耀文, 黎湘,等. 决策层时空信息融合的神经网络模型研究[J]. 系统工程与电子技术,2008,30(6):1099-1102.
[12] 郭强, 何友, 李新德. 一种快速DSmT-DS近似推理融合方法[J]. 电子与信息学报, 2015, 37(9): 2040-2046.
猜你喜欢
低温与特气(2022年2期)2022-11-26
中国典型病例大全(2022年13期)2022-05-10
一重技术(2021年5期)2022-01-18
航天工业管理(2020年9期)2020-12-28
军事运筹与系统工程(2020年1期)2020-09-11
廉政瞭望(2019年5期)2019-06-10
通信电源技术(2018年5期)2018-08-23
电子制作(2018年10期)2018-08-04
中国修船(2014年5期)2014-12-18
组合机床与自动化加工技术(2014年12期)2014-03-01
