一种基于航摄资料的历史航空影像配准算法
2018-07-03 04:39孙海萍张静怡杨泽东江苏省测绘资料档案馆江苏南京00南京师范大学地理科学学院江苏南京00中国测绘科学研究院北京0009中国科学院南京土壤研究所土壤与农业可持续发展国家重点实验室江苏南京0008
测绘通报 2018年6期
孙海萍,张静怡,杨泽东,刘 杰,4(. 江苏省测绘资料档案馆,江苏 南京 00; . 南京师范大学地理科学学院,江苏 南京 00; . 中国测绘科学研究院,北京 0009; 4. 中国科学院南京土壤研究所土壤与农业可持续发展国家重点实验室,江苏 南京 0008)
航空摄影是快速获取原始数据资源和动态更新基础地理信息的主要技术手段和资料来源[1],航空影像作为遥感图像的重要组成部分,因其数据信息量大和几何分辨率高受到普遍重视[2]。历史航空影像真实地反映了各个时期的地表形态、植被覆盖、社会经济与环境状况,客观有效地记录了自然景观与人文景观的演化变迁过程[1]。因此可以帮助后人更直观地了解过去,有助于研究城市动态变迁与生态环境的变化,从而掌握相关规律,对决策进行辅助支持。
20世纪80年代以来,我国积累了大量珍贵的航空影像资料,并且广泛应用于资源开发、环境治理、土地利用、国防建设等众多领域,有效地支持了国民经济建设和科学研究。随着计算机软硬件、GIS技术、数字图像处理、摄影测量和数据库技术的飞速发展,通过磁带、硬盘、光盘甚至胶片等媒介来管理航空资料的传统方法已跟不上时代的步伐,建立航空影像数据库势在必行。进入21世纪,国家基础地理信息中心联合武汉武大吉奥信息工程技术有限公司开发了国家基础航空摄影成果管理信息系统,各省市测绘相关部门也随后建立了航空影像管理系统,实现了航空摄影成果信息化统一管理[3]。虽然这些系统可以很好地完成航摄资料的管理,而且支持影像数据浏览和更新,但是却不能实现航空影像的漫游浏览和空间查询。
目前,常用的航空影像配准拼接的方法包括:①利用摄影测量理论制作正射影像(DOM);②利用图像匹配技术进行航空影像拼接后,再人工进行配准[4]。伴随着计算机与相关技术的飞速发展,处理航空影像时的自动化程度也在逐步提高。针对第1种方法,ERDAS LPS、VirtuoZo NT、JX-4C等全数字摄影测量工作站的出现,大大提高了正射影像制作的效率。以点、线、面为基元的图像特征匹配算法,极大提升了第2种拼接方法的效率和准确度,具有代表性的特征匹配算法有:Förstner算法[5-6],SIFT算法[7-10],基于小波变换、遗传算法和最小二乘匹配的快速高精度影像匹配组合算法[11]等。
虽然以上两种方法配准的航空影像精度比较高,但是大批量影像数据配准工作量巨大,对于只需要实现航空影像非精确位置查询的航空影像数据库,此种方法代价非常高。为减轻航空影像配准的工作量,本文仅利用航摄资料提供的摄区、航线和航片等元数据中的像主点坐标(经纬度坐标)、航摄比例尺、像幅高度和像幅宽度等字段,基于摄影测量学和数字图像处理技术,使用GDAL和Pro4Net等开源工具,设计并实现无控制点依赖的航空影像配准算法,从而实现航空影像的快速拼接,满足历史航空影像小比例尺漫游浏览和空间查询的要求。
1 数据整理与分析
本文研究区位于江苏省,介于东经116°18′—121°57′,北纬30°45′—35°20′之间,地处江淮平原,地形以平原为主,江苏省的平原面积为7万km2,占全省面积的70%以上,主要由苏南平原、苏中江淮平原、苏北黄淮平原组成。自从20世纪70年代以来,江苏省进行了多次全省级的航空摄影测量,积累了大量宝贵的航空影像数据,本文研究对象包括1970年至今的江苏省航空影像数据。
1.1 历史航摄数据
本文需要处理并建库的影像包括:①江苏省测绘局档案馆馆藏1976—1993年的小比例尺航空影像数据35 440张;②馆藏1980—2004年大比例尺航空影像数据30 313张。其中每张影像大小为100 MB左右,总数据量达到6.3 TB以上。航摄资料包括航片扫描技术设计书、航片扫描技术总结报告、航片扫描质量检测报告和航空胶片扫描仪检测报告,元数据包含:摄区元数据、分区元数据、摄区范围元数据、航线元数据、航片元数据、底片筒元数据和像片盒元数据。图1为航空影像元数据关系示意图。
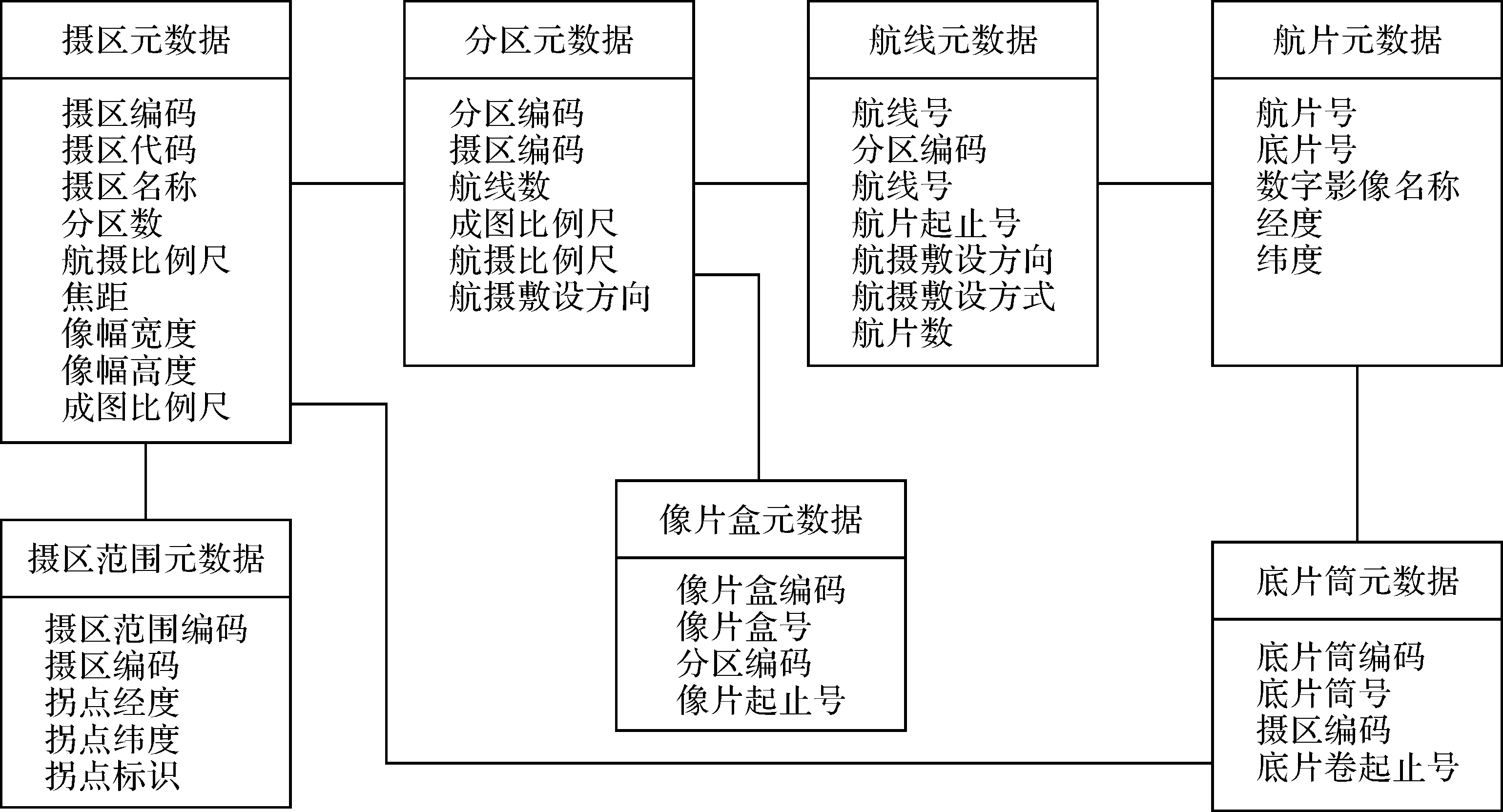
图1 航空影像元数据关系示意图
1.2 数据分析
馆藏历史航摄数据具有如下特点:
(1) 数据量大。航摄数据包括航摄资料、航空影像和航空影像索引图,其数据量主要由航空影像决定。单张无压缩航空影像最大可达140 MB,最小在70 MB左右,一个中等大小的摄区拥有2000张左右影像,数据量超过195 GB。
(2) 航摄资料残缺。航摄资料是航空影像数据配准的重要依据,但是因为年代久远,大多数摄区航摄资料存在缺失现象,内外方位元素基本丢失。根据分析发现,现存航摄资料中摄区元数据的航摄比例尺、焦距、像幅宽度、像幅高度等字段,以及航空影像元数据的像主点经度、纬度等字段可以用于航空影像配准工作。
(3) 航线设计复杂多变。航线敷设方向一般为东西方向,考虑航摄区域特点等因素还会出现南北方向的情况,在某些摄区存在部分航线方向为东西、其他航线方向为南北的复杂情形,有些摄区因为沿着一定的人工建筑(如高速公路、铁路等)或自然景观(如河流、山脉等)敷设航线,因此航线没有一定的规律(如图2所示)。航线敷设方向决定了航空影像名称的字头朝向,然而扫描时影像字头朝向各不相同,需根据具体情况进行相应处理。
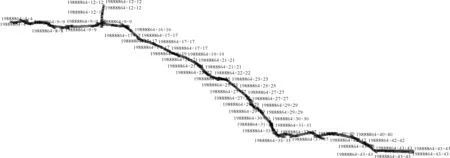
图2 某摄区航迹图
以上多种因素导致了完全基于航摄资料的历史航空影像配准工作效率相对较低、精度不高,仅能实现小比例尺的漫游浏览和空间查询。
2 基于航摄资料的航空影像配准算法
2.1 算法思路
传统的基于航摄资料的航空影像配准算法需要具备内、外方位元素,在图像特征匹配算法支持下完成航空影像的空间前方交会,最后利用计算获取的地面控制点进行仿射变换,从而完成航空影像配准。本文称以上方法为摄影测量法,然而本文研究的历史航空影像的航摄资料缺失内、外方位元素,无法使用摄影测量法配准历史航空影像。因此,根据传统的摄影测量法,以实现历史航空影像拼接浏览和查询为目的,本文设计了一种实现航空影像的快速拼接算法——估算法。估算法的算法思想为:利用航摄比例尺、像幅高度、像幅宽度和像主点坐标等信息,将摄影测量的坐标系统进行简化,从而估算航空影像四角点坐标,最后利用仿射变换完成航空影像配准。
2.2 算法实现
将航摄时坐标系简化为像空间坐标系和物方坐标系(并使用投影坐标系作为物方坐标系),像空间坐标系中假设经过裁切处理的影像扫描坐标系相同,同时假定像空间坐标系只在水平方向做旋转运动(即假定飞机没有竖直方向的转动)。
由于内外方位元素的缺失,假设航片像主点为航空影像有效范围的中心点,假定航摄比例尺为整张影像的比例尺,并且像幅宽度和像幅高度为像片有效范围的高度与宽度。算法可通过以下步骤实现。
2.2.1 像片背景噪音去除
扫描时由于背景的存在,航空影像实际扫描范围大于有效范围,估算法配准影像需要利用航片有效范围,因此必须去除像片背景噪音。对大量航空影像分析发现,影像背景与有效范围之间存在明显的灰度值差,在像片上反映为背景部分与有效范围的分割线,如能够确定一个阈值,就能将背景与有效范围区分。本文采用影像灰度之差加权和最小的算法计算最佳阈值,完成影像有效范围与背景的分割,提取有效影像范围。
由于影像框标和扫描影像的偏转,会在四角存在框标和不同程度的影像旋转。为消除旋转对配准精度的影像,利用边缘检测[12-15]和最小二乘算法实现像片旋转的纠正。
为提高影像有效范围提取效率,结合航空影像特点,设置了一个合理的搜索范围和搜索策略:即从上到下和从下到上搜索n行影像,n为设定值且取值范围是(0,R](R为影像总行数),进而确定有效影像上下边界行;自左向右和自右向左搜索m列影像,m为设定值且取值范围是(0,C](C为影像总列数),从而确定有效影像左右边界列;最终实现影像有效范围提取。
经过以上算法处理的航片,在框标所在处会存在一定的背景。为增强航空影像漫游浏览的视觉效果,设置影像四角点一定长宽的影像灰度值为0,以实现配准后影像的美化显示。像片去噪流程示意图如图3所示。

图3 影像背景噪音去除流程
2.2.2 像片角点坐标计算和浏览抽取

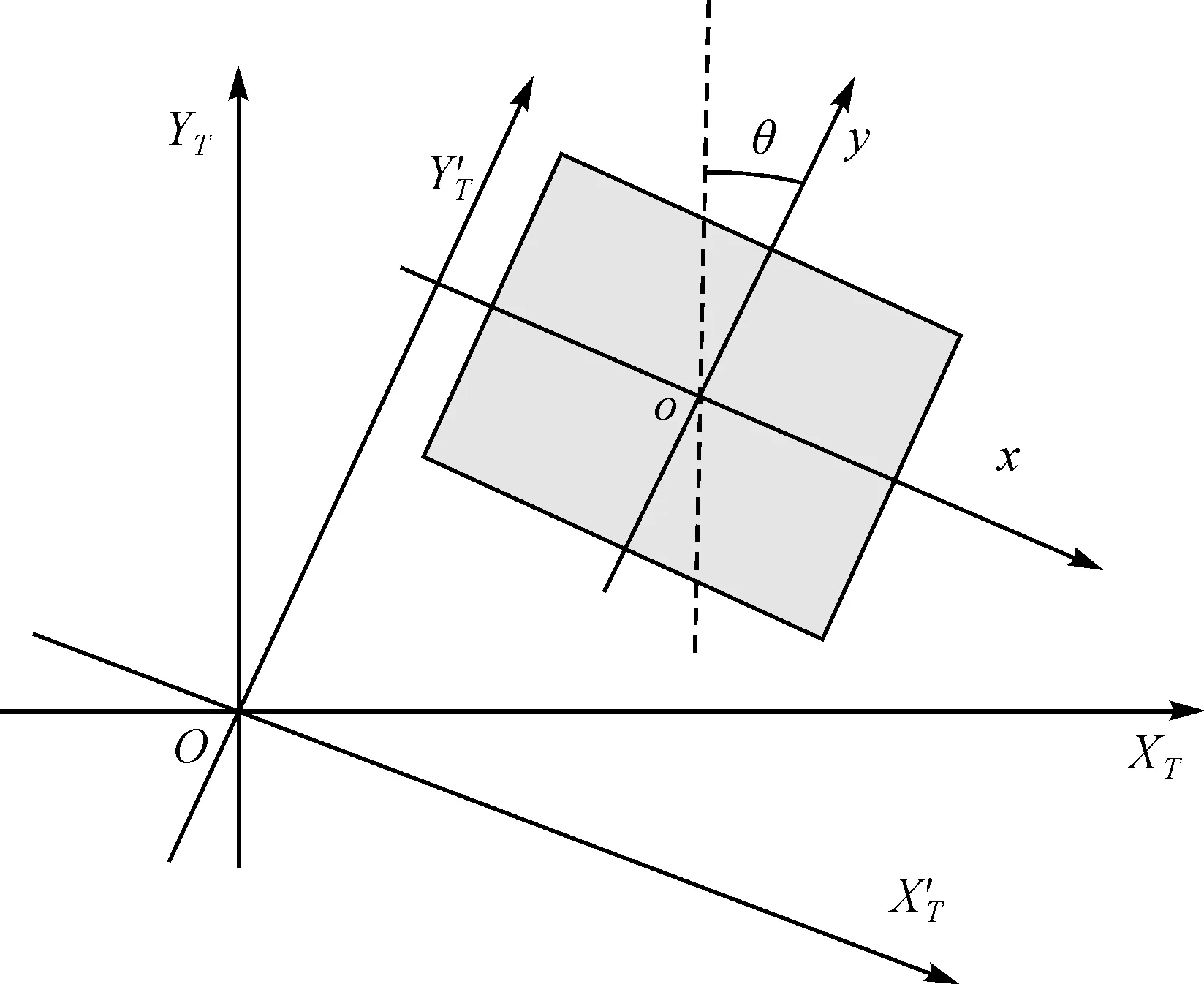
图4 简化的航摄坐标系统
2.2.3 影像配准
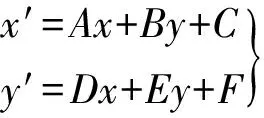
影像配准一般需要经过变换重采样,重采样需要消耗高内存并且花费大量时间。本文利用ArcInfo、MicroStation、AutoCAD等均支持坐标信息文件TFW为影像赋予空间坐标,大大提高了航片配准效率。TFW定义了影像坐标与空间坐标之间放射变化关系,式中x′、y′表示像素对应的空间坐标,x、y为像素行列坐标,A、B分别为x、y方向的像素分辨率,D、B为图像旋转参数,C、F分别为图像左上角点空间坐标值。根据航空影像四角点坐标及相关信息,可以计算TFW文件的六参数。
3 结论与讨论
(1) 本文使用小比例尺航空影像作为试验数据,利用估算法对航空影像配准,结果表明该算法可以准确地抽取出相应重叠度的航片。航空影像配准之后,即可以实现航空影像的拼接,进而满足漫游浏览和空间查询。如图5、表1所示,对比抽取前后的航空影像,可以发现漫游影像抽取后一般为原始影像片数的一半左右,部分甚至比抽取前的1/10稍多。因此,对抽取之后的航空影像进行裁切、配准,进而实现航空影像的拼接将大大提高处理效率。
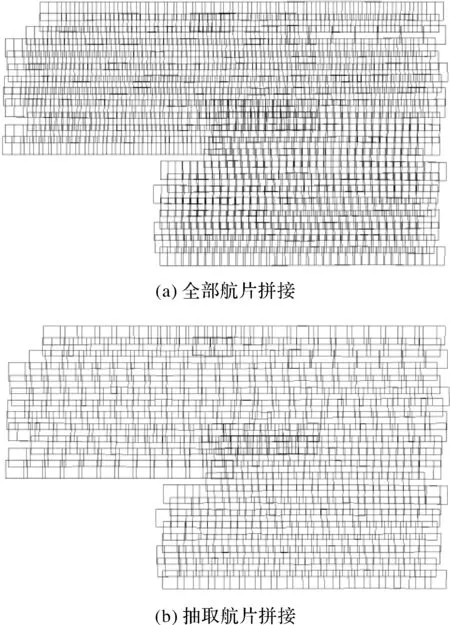
图5 某摄区抽取效果

表1 部分摄区抽片结果
(2) 精度检查:由于本文对历史航空影像进行配准的目的在于小比例尺漫游浏览与空间查询,同时考虑像主点定位精度较低及估算法对配准结果的影响,常规的控制点定位检查意义不大。因此,本文采取航空影像与矢量数据叠加的方法进行检验,将航空影像拼接图与江苏省矢量河流、道路等进行叠加(如图6所示),经目视检查,主要标志性地物重合较好,可以基本满足漫游浏览和空间查询的需求。
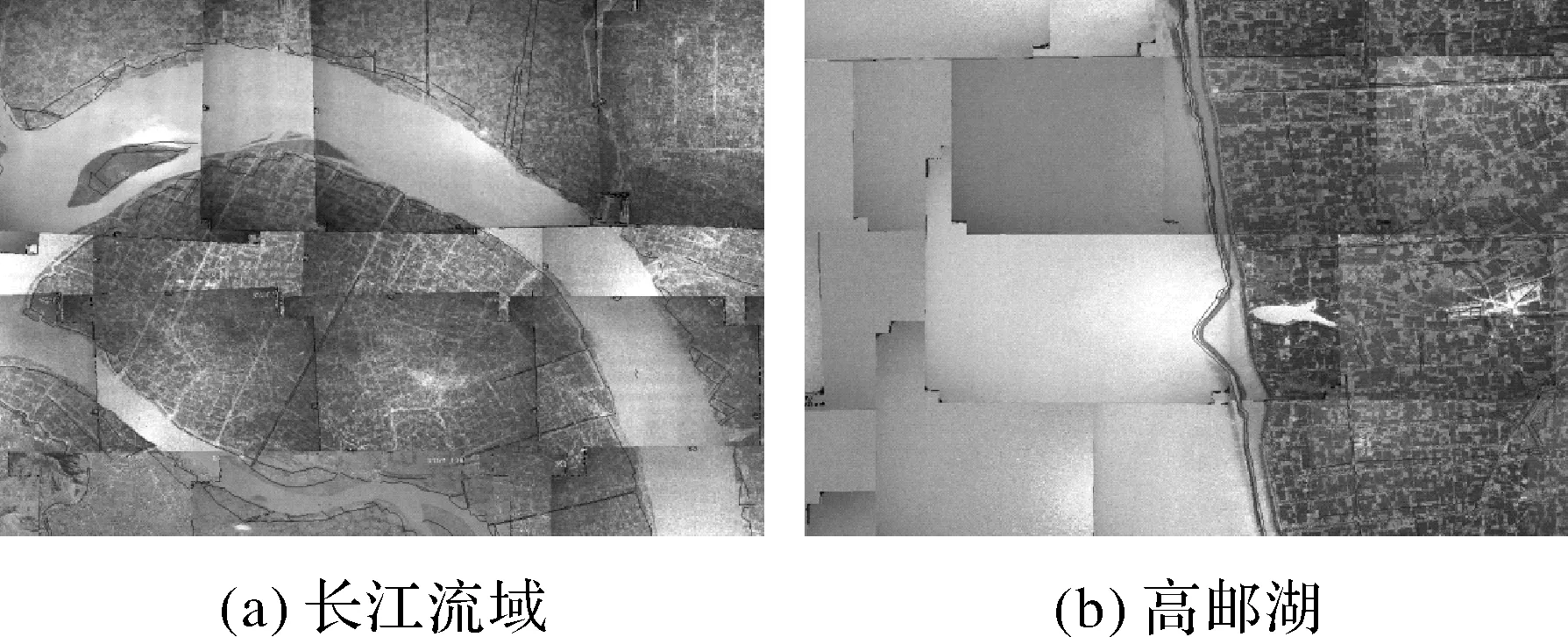
图6 拼接影像与矢量叠加
(3) 本文仅使用航摄资料进行航空影像配准,拼接精度相对较低。后期研究可引入DOM、DEM数据结合图像处理相关技术,对航空影像进行正射纠正,从而实现影像精确配准。
4 结 语
基于摄影测量与图像处理相关理论,本文设计了基于有限航摄资料的航空影像配准算法。利用该方法,对航摄资料部分缺失的江苏省测绘资料档案馆馆藏历史航空影像进行了无交互快速批量配准。与传统的制作DOM影像及人工配准方法相比,本文算法无需人工干预,大大提高了航空影像配准的处理效率,能满足中低精度的航空影像管理需求。但本文仅使用航摄资料进行航空影像配准,拼接精度相对较低。后期研究拟引入DOM、DEM数据,结合图像处理相关技术,对航空影像进行无交互快速批量航空影像精纠正,以满足高精度的航空影像更高的应用需求。
参考文献:
[1] 严荣华,李京伟,朱武,等.历史航空影像数字化与建库技术初探[J].遥感技术与应用,2004,19(2):102-107.
[2] 庹红娅.多源航拍图像校正、配准及其应用研究[D].上海:上海交通大学,2005:1-2.
[3] 钟九生,江南,胡斌,等.面向城市应用的多源遥感影像服务平台设计与实现[J].地球信息科学学报,2012,14(1):116-122.
[4] 宫阿都,何孝莹,雷添杰,等.无控制点数据的无人机影像快速处理[J].地球信息科学学报,2010,12(2):2254-2260.
[5] FÖRSTNER W,GÜLCH E.A Fast Operator for Detection and Precise Location of Distinct Points,Corners and Centres of Circular Features [C]∥ISPRS Intercommission Conference on Fast Processing of Photogrammetric Data.Interlaken,Switzerland:[s.n.],1987:281-305.
[6] 郑明玲,刘衡竹.遥感图像配准中特征点选择的高性能算法研究及其实现[J].计算机学报,2004,27(9):1284-1289.
[7] BROWN L G.A Survey of Image Registration Techniques[J].ACM Computing Surveys (CSUR),1992,24(4):325-376.
[8] LOWE D G.Distinctive Image Features from Scale-invariant Keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[9] BROWN M,LOWE D.Invariant Features from Interest Point Groups[C]∥Proceedings of the British Machine Vision Conference 2002.Cardiff,UK:BMVA Press,2002:23.1-23.10.
[10] WYAWAHARE M V,PATIL P M,ABHYANKAR H K.Image Registration Techniques:an Overview[J].Interna-tional Journal of Signal Processing,Image Processing and Pattern Recognition,2009,2(3):1-5.
[11] 熊兴华,陈鹰,钱曾波.一种快速、高精度和稳健的影像匹配算法[J].测绘学报,2005,34(1):40-45.
[12] VIKRAM K,UPASHYAYA N,ROSHAN K,et al.Image Edge Detection[J].Special Issues of International Journal of Computer Science and Informatics (IJCSI),2010:216-220.
[13] CATT E F,LIONS P L,MOREL J M,et al.Image Selective Smoothing and Edge Detection by Nonlinear Diffusion[J].SIAM Journal on Numerical Analysis,1992,29(1):182-193.
[14] 王植,贺赛先.一种基于Canny理论的自适应边缘检测方法[J].中国图象图形学报,2004,9(8):65-70.
[15] 李牧,闫继红,李戈,等.自适应Canny算子边缘检测技术[J].哈尔滨工程大学学报,2007,28(9):1002-1007.
[16] 朱肇光,孙护,崔炳光.摄影测量学[M].北京:测绘出版社,2004:195-197.
[17] 陈鹰.遥感影像的数字摄影测量[M].上海:同济大学出版社,2003:81-98.
猜你喜欢
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
考试与评价·八年级版(2020年4期)2020-10-26
考试与评价·八年级版(2020年1期)2020-10-26
考试与评价·八年级版(2020年1期)2020-10-26
阅读与作文(英语初中版)(2019年8期)2019-08-27
小学生学习指导(低年级)(2018年11期)2018-12-03
现代防御技术(2016年1期)2016-06-01
IT时代周刊(2015年7期)2015-11-11
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01