
采摘机器人智能系统应用研究—基于人工神经网络和篮球运动员训练策略
2018-07-03 08:30黄娟
农机化研究 2018年7期
黄 娟
(中原工学院 信息商务学院,郑州 451191)
0 引言
篮球运动情境中的决策研究一直是运动认知领域的焦点问题,对于那些开放性的、同场对抗类的集体竞技项目来说,运动决策的水平直接影响着运动员运动能力和技战术水平的发挥。这就要求运动员有对目标的捕捉并实时处理的能力,除了紧密锁定篮球目标外,还需要通过自身决策规划好前进路线,才能完成高效率和高质量的进球。对于采摘机器人而言,如果要想提高其作业效率,必须考虑实时目标的追踪和捕捉,并及时规划作业路径,才能保证高质量的自动化采摘作业,因此可以将篮球运动员训练策略的决策系统引入到采摘机器人的控制平台上,使其发挥出更加优越的性能。
1 智能路径自主规划与篮球训练策略
篮球运动属于剧烈对抗的一种运动,要求运动员反映速度快,具有高效的决策能力和队员的协同能力,因此对于运动员的训练应着重培养其反应能力和高效的自主规划能力。路径规划是实现运动员能否突破防守和提高命中率的关键,运动员在训练时需要对其进行短时间刺激,如投篮这一项,需要出手前对篮球路线有规划,篮球是呈现抛物线形状出手,出手时需调整合理的角度,如图1所示。
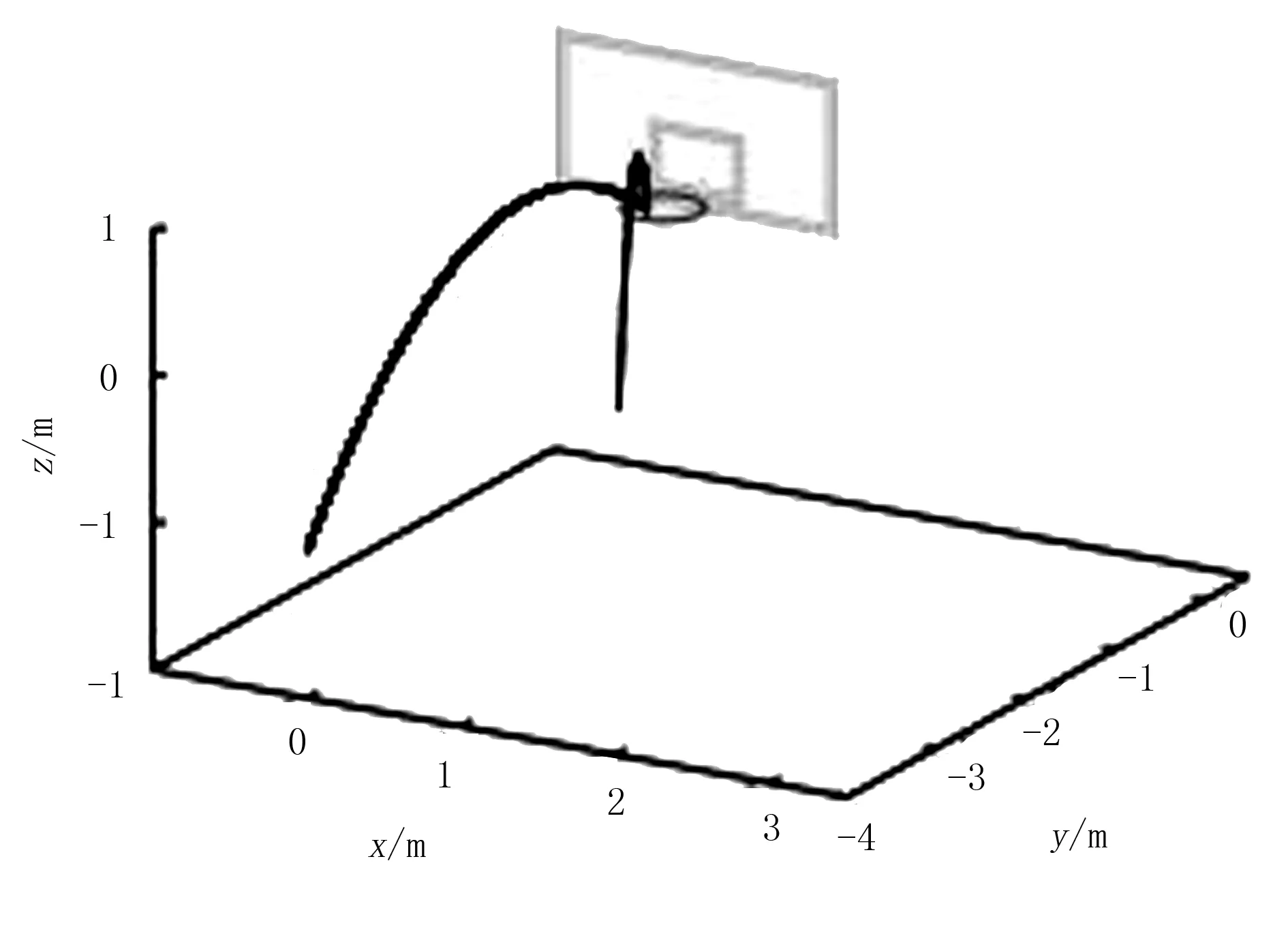
图1 正确的路径规划结果
图1表示在正确的篮球路径出手角度和状态调整后篮球命中篮框的结果,如果路线规划不好,则会出现较大的偏差,因此路径规划对于命中率的训练较为重要。
图2表示在错误的路径规划时,篮球没有命中的情形。当篮球没有命中时,运动员需要根据篮球预设路径对篮球进行追踪,以抢篮板或者配合队员抢篮板,整个智能路径自主规划和篮球训练策略的流程如图3所示。
在篮球比赛场上,运动员在激烈的比赛中,比赛的进行实际上成为了对比赛现实情境的认知过程。在此过程中,运动员对比赛情景表现为意识和行动的相互作用。如图3所示:运动员先观察实时情境,然后对情境进行信息搜集,并通过刺激不断地训练情境反应,进一步进行思维加工;加工过程包括分析综合、分类比较和大脑的抽象概括,最后形成决策。这种决策主要是对路径的规划,最后形成自主的规划能力。
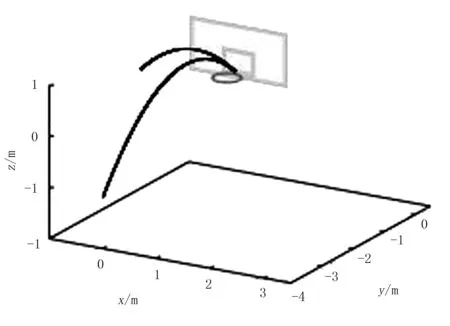
图2 错误的路径规划结果
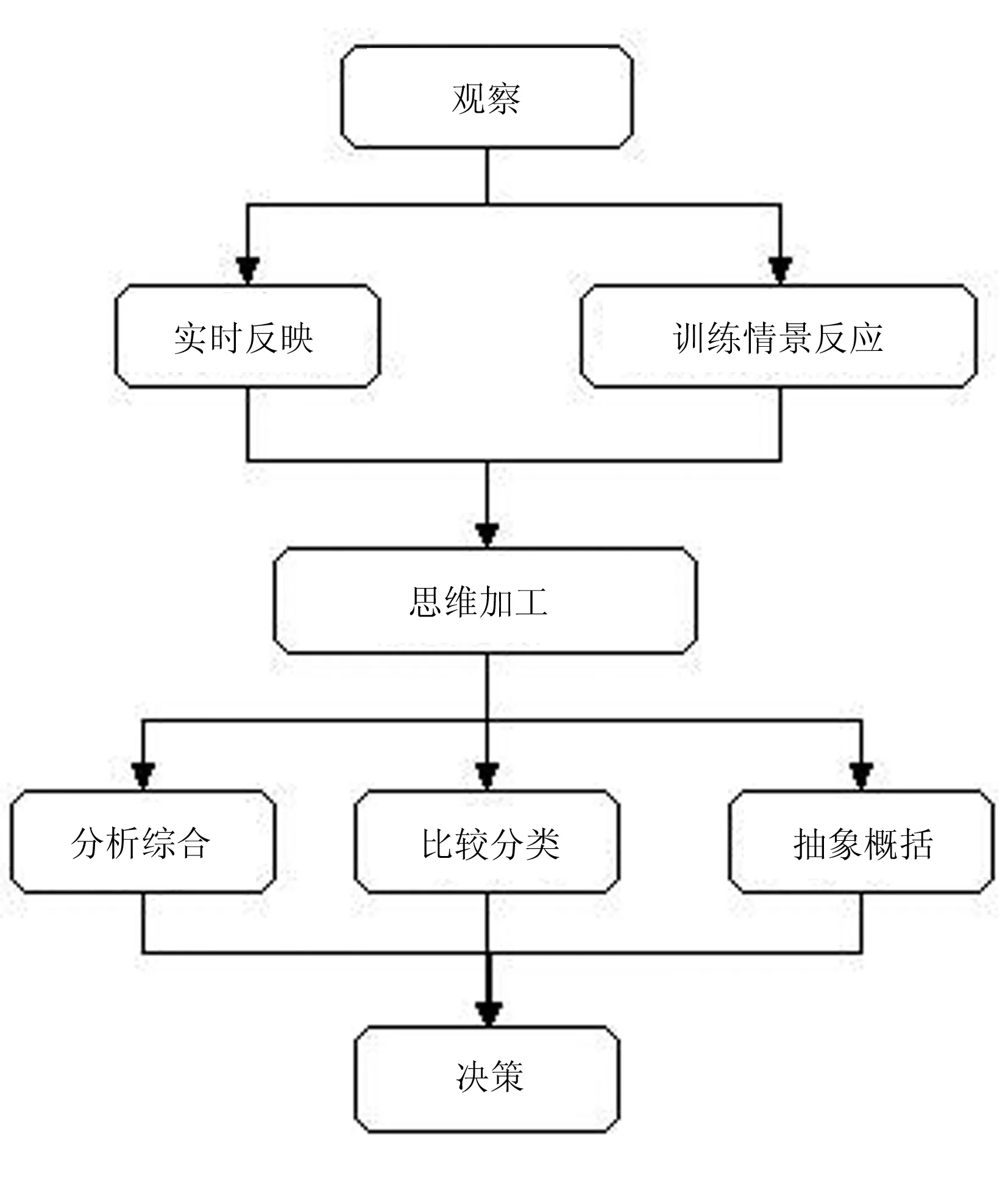
图3 基于自主路径规划的篮球训练策略的流程
2 篮球运动员人工神经网络训练算法
篮球运动员的训练任务主要是攻击、防守和团队的配合等项目,而进攻是篮球运动员得分的主要方式之一,是指篮球运动员绕开防守人员将篮球投入目标篮球框而得分。在实际比赛过程中,防守队员是灵活的,因此在平时训练策略中需要使用动态的障碍物。人工神经是对生物神经元细胞极其简单的抽象而建立的模型,这个模型可以通过电路或者通过控制程序来实现,如图4所示。

图4 人工神经元模型
该模型可以模拟神经元细胞的工作原理,将输入的数据进行加工处理,得到合理的决策数据,假设障碍物的形状为凸多边形,其数学表达式为
(1)
其中,障碍物的边数用m表示。其中,训练数据的输入部分为p1,p1,…,pR;ω1,ω2,…,ωR表示连接权值;θ表示偏置信值,同神经元中的兴奋阈值类似,障碍物的(x,y)点都在不等式约束的范围之内。在篮球比赛时,防守队员是灵活运动的,也就是障碍物是移动的,因此需要调整一部分参数,才能够得到运动后的障碍物。
根据两点可以确定一条直线的原理,假设直线上有确定的两点p1(x1,y1)和p2(x2,y2),则权值和置信值可以分别表示为
(2)
对方防守队员可以看作一个动态得到凸多边形障碍物,如果障碍物的所有顶点的坐标是明确的,则可以确定神经网络模型中的各种参数;然后,根据其移动的速度和时间,便可以计算出移动后障碍物的每个新位置坐标,再次重新确认神经网络模型的各种参数。如果障碍物做平移动作,各个参数都可以进一步简化,各个边的ωx、ωy不变,可得θM的更新公式为
ΔθM=-ωxpx-ωypy
(3)
其中,px、py分别是平移向量p在x轴、y轴上的投影分量。假设椭圆的两个端点分别是A1(x1,y1)和A2(x2,y2),其2a长轴可以表示为
(4)
长轴与x轴正方向的夹角θ0为
(5)
椭圆的中心C(x0,y0)为
(6)
假设短轴的一个端点为B1(x3,y3),则短轴的长度2b为
(7)
有了a、b、θ0这些参数,就可以对神经网络参数进行更新,其神经网络的第一层的偏置值按下面的公式更新,即
(8)
(9)
如果活动的障碍物为其他形状,还可以根据需要进一步拓展模型。
3 采摘机器人功能测试
利用人工神经网络可以对采集到的信息迅速进行处理,利用篮球运动员决策策略模型可以对目标迅速定位,并规划出相应的路径,将篮球运动员训练的神经网络模型移植到采摘机器人上,可以有效的提高采摘机器人的智能化水平。其智能化流程如图5所示、同篮球运动员的训练类似,采摘机器人在智能化训练过程,也需要对采摘情景的信息进行搜集并训练对情景的反应能力,然后利用篮球运动员的神经网络训练策略,形成思维,并对路径的规划能力进行比较分类,最终形成决策能力。
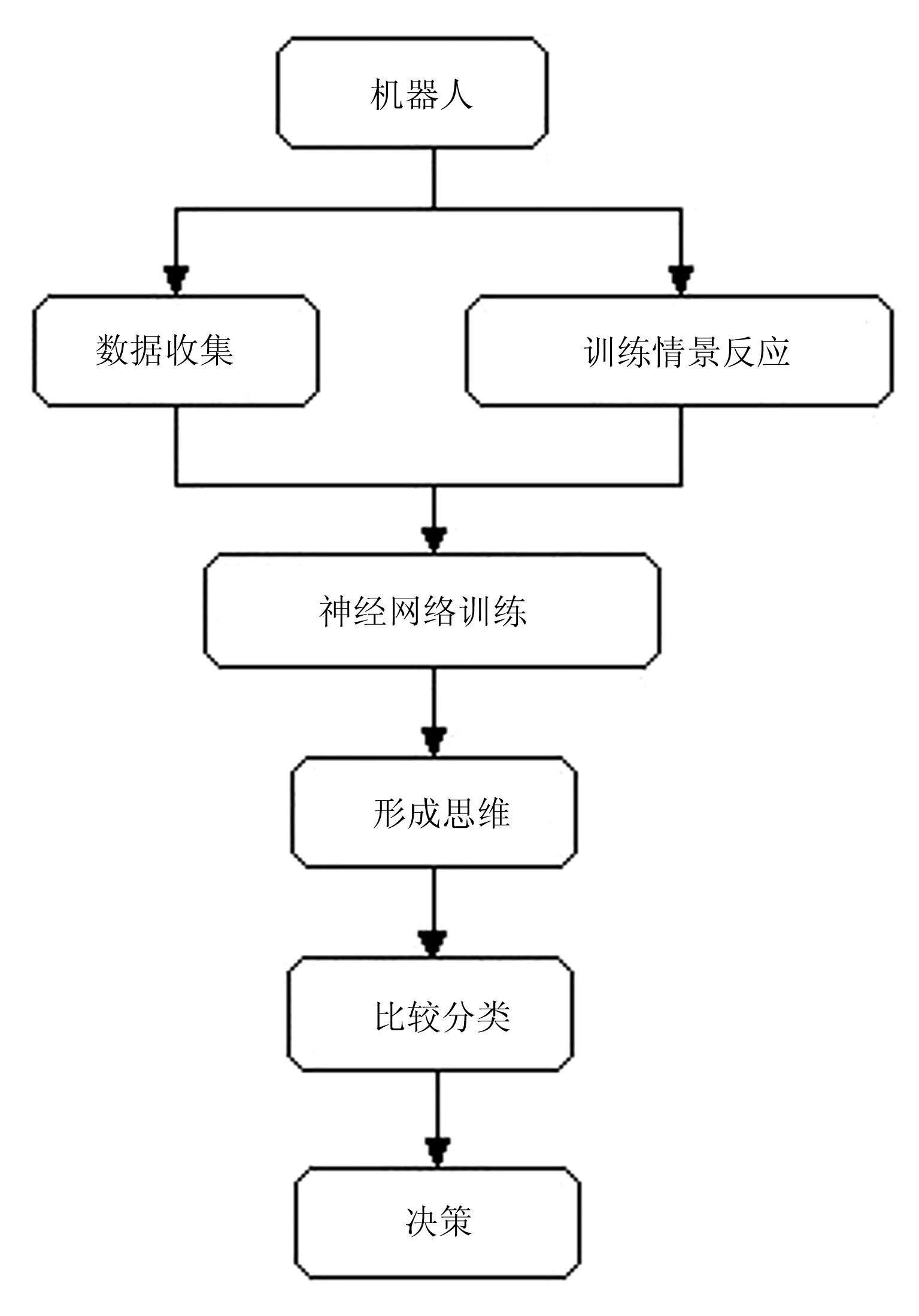
图5 基于篮球训练策略的采摘机器人智能化流程
为了验证方案的可行性,本次以青椒的采摘为例(见图6),通过编程的方式,在采摘机器人控制系统中神经网络训练策略模型,通过对实验误差和响应时间的统计,验证算法的可行性和优越性。
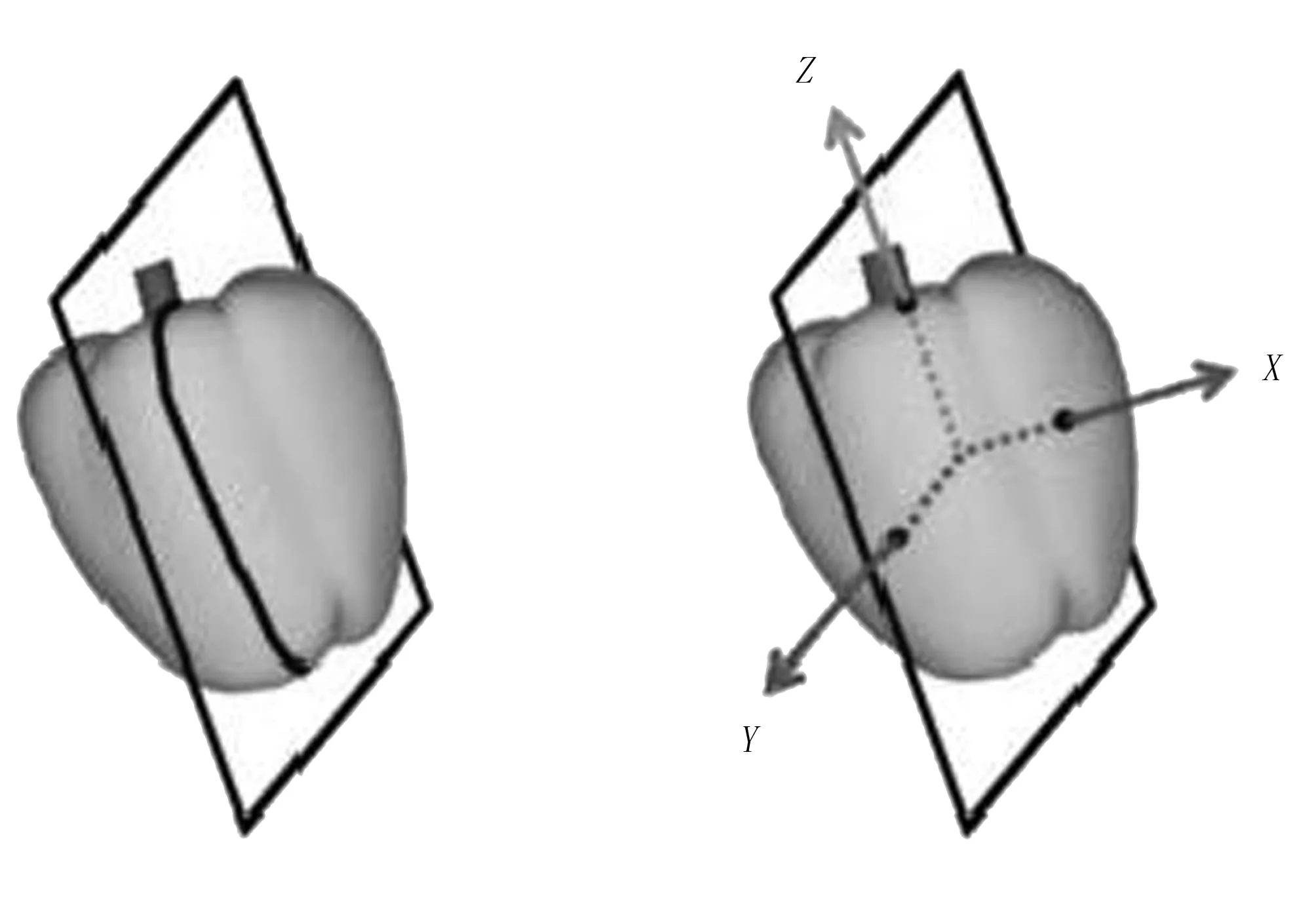
图6 待采摘青椒示意图
如图7所示:对青椒采摘进行了试验研究,为了验证基于神经网络篮球运动员训练策略控制系统的可靠性和优越性,对不同算法控制下采摘机械手的采摘响应时间和采摘误差进行了分析统计,得到了如图8所示的结果。

图7 采摘机器人实验场景
图8中,分别采用了神经网络、遗传算法、蚁群算法和蜂群算法4种算法对采摘误差和响应时间进行了统计。由统计结果表明,神经网络算法的误差要明显的比其他算法小。
如表1所示:采用神经网络训练算法不仅误差较小,而且在响应时间上,相比其他算法更加快速。这是由于神经网络算法对路径规划的能力较强,而且可以通过合理的权值优化得到更加快速的响应速度,因此将其使用在采摘机器人系统中具有较好的优越性。

图8 误差数据统计
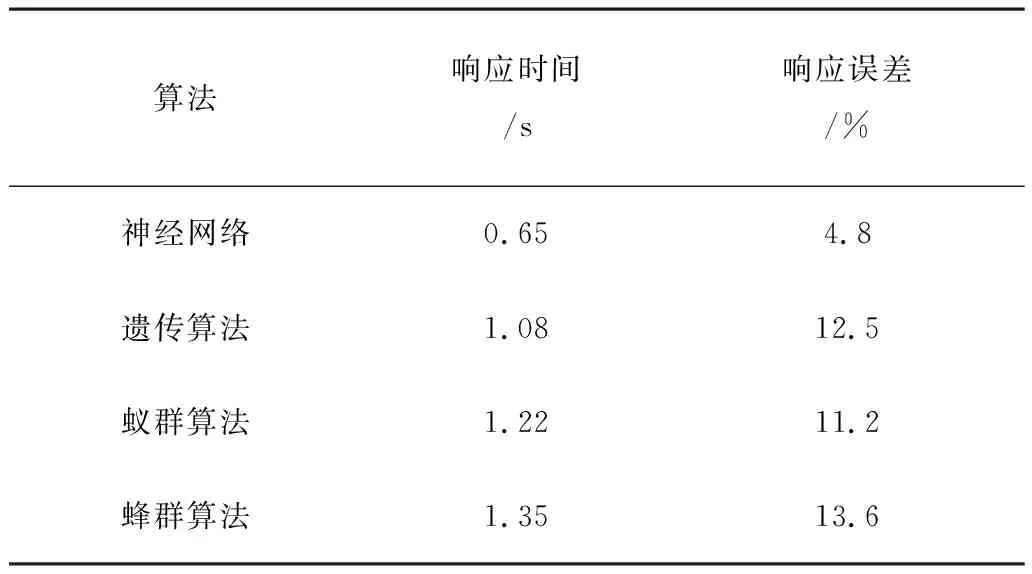
算法响应时间/s响应误差/%神经网络0.654.8遗传算法1.0812.5蚁群算法1.2211.2蜂群算法1.3513.6
4 结论
为了提高篮球训练策略的效率,提高运动员对篮球场情境的反应能力,在篮球训练策略上引入了人工神经网络方法,通过不断的智能化训练,以提高反应决策的效率和水平。将这种方案引入到了采摘机器人的智能化决策系统中,通过智能化训练使机器人具有更快的果实目标捕捉,对能力和更快的响应速度,从而提高采摘效率。最后,采用不同算法对采摘机器人的作业能力和效率进行验证,结果表明:采用人工神经网络算法可以有效提高机器人的响应速度,以及采摘机器人的作业水平和作业效率。
参考文献:
[1] 王文庆,张涛,龚娜.基于多传感器融合的自主移动机器人测距系统[J].计算机测量与控制,2013,21(2): 343-345.
[2] 韦伟,周凌翱,刘青.一种便携式的红外测距系统[J].电子设计工程,2011,19(21):40-42.
[3] 刘金帅,赖惠成,贾振红.基于YCbCr颜色空间和Fisher判别分析的棉花图像分割研究[J].作物学报, 2011,37(7):1274-1279.
[4] 朱群峰,黄磊.温室移动机器人轨迹控制系统的设计[J].农机化研究,2009,31(4):73-75.
[5] 张卫东.我国温室发展的现状及发展建议[J].科技信息,2013(10):439.
[6] 李明,李旭,孙松林,等.基于全方位视觉传感器的农业机械定位系统[J].农业工程学报,2010,26(2):170- 174.
[7] 傅锡敏,薛新宇.基于我国施药技术与装备现状的发展思路[J].中国农机化,2008(6):72-76.
[8] 傅泽田,祁力钧,王俊红.精确施药拉术研究进展与对策[J].农业机械学报,2007,38(1):189-192.
[9] 郭辉,韩长杰.精确施药技术的研究与应用现状[J].农业技术与装备,2009(10):42-46.
[10] 吕太国.静电喷雾系统特性研究[J].农机化研究, 2009,31(5):54-70.
[11] 燕明德,贾卫东,张斌,等.国内外静电喷雾施药技术及机具研究[J].农业机械,2008(8):53-54.
[12] 刘金龙,丁为民,邓巍.果园对靶喷雾红外探测系统的设计与试验[J].江苏农业科学,2012,40(12):370-372.
[13] 高春城.我国农业发展的资源环境问题与展望[J].当代生态农业,2013(4):151-154.
[14] 万宝瑞.当前我国农业发展的趋势与建议[J].农业经济问题,2014,4(1):110-114.
[15] 赵其国.当前我国农业发展中存在的深层次问题及对策[J].生态环境学报,2013,22(6):911-915.
[16] 赵其国,黄国勤,王礼献.中国生态安全、农业安全及“三农”建设研究[J].农林经济管理学报,2014,13(3): 237-243.
[17] 徐国保,尹怡欣,周美娟.智能移动机器人技术现状及展望[J].机器人技术与应用,2007(5):29-34.
[18] 薛晗,李迅,马宏绪.基于无线传感器网络的移动机器人智能导航算法[J].传感技术学报,2008,21(5):834- 840.
[19] 李彩虹,李贻斌,范晨.移动机器人动态避障算法[J].山东大学学报:工学版,2007.37(5):60-64.
[20] 杨晶东,洪炳熔,朴松昊.基于模糊行为融合的移动机器人避障算法[J].华中科技大学报:自然科学版,2008,36(增刊):224-227.
[21] 孙吉贵,刘杰,赵连宇.聚类算法研究[J].软件学报,2008,19(1):48-61.
[22] 曾东海,米红,刘力丰.一种基于网格密度与空间划分树的聚类算法[J].系统工程理论与实践,2008,28(7): 125-133.
[23] 李光强,邓敏,刘启亮,等.一种适应局部密度变化的空间聚类方法[J].测绘学报,2009,38(3):255-263.
[24] 刘铭,王晓龙,刘远超.一种大规模高维数据快速聚类算法[J].自动化学报,2009,35(7):859-866.
[25] 傅隆生,张发年,槐岛芳德.猕猴桃采摘机器人末端执行器设计与试验[J].农业机械学报, 2015,46(3):1-8.
[26] 高浩,王虎,陈军.猕猴桃采摘机器人的研究与设计[J].农机化研究, 2013,35(2):73-76.
[27] 纪超,冯青春,袁挺,等.温室黄瓜采摘机器人系统研制及性能分析[J].机器人,2011, 33(6):726-730.
[28] 刘继展,李萍萍,倪齐,等.番茄采摘机器人真空吸盘装置设计与试验[J].农业机械学报,2010,41(10):170- 173,184.
[29] 陆化珠,蔡健荣,孙力,等.基于超声测距的柑橘收获机器人应急避障系统[J].农机化研究,2011,33(12): 151-153.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年5期)2022-06-06
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
泰山学院学报(2019年6期)2020-01-14
电子制作(2019年19期)2019-11-23
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年24期)2019-02-23
