
小型旋转式割草机研究设计
2018-07-03 08:30傅美贞田军伟陈德俊
农机化研究 2018年7期
傅美贞,田军伟,陈德俊,何 勇
(1.金华职业技术学院,浙江 金华 321007;2.浙江四方集团公司,浙江 永康 322000;3.浙江大学,杭州 310058)
0 引言
随着我国城镇化建设不断推进,周围环境也不断改善,草坪绿化已日益受到人们的重视,近几年大中城市的草坪面积翻了几番。现有的一些小型割草机,因其生产率低、劳动强度大等原因,已满足不了草坪面积发展的需要;而一些大型圆盘旋转牧草收割机,适用于高密度的人工种植和天然草场收割[1-2],不宜在小块田地上使用及用来修剪草坪。虽然我国割草机械的发展已形成了一定的规模,但在南方各省市,绿化草坪用的割草机大都是手持式或手扶式的电动或汽油机驱动的小型割草机,市售的中小型割草机功能单一;收割牧草的机械不适宜草坪的修剪,修剪草坪的割草机不适宜牧草的收割,即使可以收割,生产率也相当低,劳动强度大[3]。手扶拖拉机在我国南方各地的使用已相当普及,一般只有犁耕机和旋耕机等配套农具[4],未见有与手扶拖拉机配套的割草机。因此,进行了与手扶拖拉机配套的小型旋转式割草机的设计。
1 整机结构和工作原理
1.1 总体方案
要求所设计的旋转式割草机结构简单、体积小、挂接方便;割茬低、消耗功率低;整机生产效率高,能适用于平原、丘陵、坡地窄小地块和套种田等地块的杂草清除及草坪修整。借鉴国内外割草机械的研究成果,并参考手扶拖拉机旋耕机等现有配套机具的设计方案,割草机采用乘坐式,整机由左右驱动轮和尾轮支承。所设计的旋转式割草机主要由传动装置、提升装置和切割装置组成。动力传递采用上传式(由顶部传入),现有割草机的切割装置有前悬挂式或后悬挂式,为避免因手扶拖拉机重心偏前引起整机平衡问题,本割草机采用后悬挂,操作人员的视线好,且割草机的挂接和动力输出方便。
1.2 工作原理
工作时,拖拉机发动机的动力由飞轮皮带轮输出到离合器,经传动机构一边将动力经变速器传送到行走轮上,一边将动力经皮带轮和锥齿轮传递给切割器,带动割刀转动进行切割作业。在拖拉机行进过程中,割刀把杂草、秸秆等切断、打碎,并铺在地面上。由于地面的凸凹不平,为了旋转割刀能紧急避障,一组由平行四连杆机构和杠杆机构组成的提升机构可实现刀架的快速提升(降),提升机构能使割刀做上下平移运动[3]。
2 主要结构设计
2.1 传动系统的设计
利用GN121手扶拖拉机的动力传动系,采用单级一侧传动方案,传动示意图如图1所示。工作时,动力由柴油机经飞轮输出后,传递到离合器皮带轮(行走),并由其传给驱动割刀的输入轴皮带轮,经锥齿轮后,改变传动方向直接传递给割刀,从而完成机器边行走、边切割的工作过程。

1.输入轴皮带轮 2.离合器皮带轮 3.飞轮 4.柴油机 5.行走系输入轴 6.割刀传动输入轴 7、8.锥齿轮 9.割刀驱动轴 10.割刀罩壳 11.割刀
2.2 挂接提升机构设计
割草机结构如图2所示。根据机架组合件离地高度和切割组件升降时的活动范围,设计了平行四连杆提升机构。提升机构中手柄、齿板及连接杆座采用原机结构;平行四连杆机构的上连杆(挂接架)为固定杆,为保证切割装置在提升和下降时前后位移尽可能小,将其设计成倾斜,与水平夹角为30°;在提升和下降过程中,割刀罩不能触及车轮和后面的尾轮,割刀上下极限位置可通过定位销在齿板中的位置来调整,并确保有160mm的升降空间(即定位销插入齿板最上方齿槽和最下方齿槽时切割器的高度差)。
提升机构由操纵杠杆、手柄、齿板、连接杆座及平行四连杆机构等组成。挂接架通过两只插销与手扶拖拉机的牵引框相连接(固定不动),齿轮箱体通过连接杆与一组平行杆相连接(左右对称),齿轮箱体又通过连接杆座和拉杆与操纵杠杆相连。整个提升操纵机构安装在座架组合件的位置上,当握住操纵杠杆同时捏住手把,使定位销离开齿板的齿槽,可操纵割草机构的起落。切割装置的升降由操纵杠杆操纵,割茬高度由定位销在齿板齿槽的位置来调节。当手把的定位销插入齿板最上方齿槽时,割草机处于下限位置;当定位销插入齿板最下方齿槽时,割草机处于上限位置。

1.齿轮箱 2.张紧轮 3.平行杆 4.挂接架 5.齿板 6.手柄 7.连接杆座 8.张紧轮拉线座 9.拉杆 10.连接杆 11.割刀罩 12.割刀
2.3 切割器结构设计
手扶拖拉机的两驱动轮最大间距只有810 mm[4],间距小、空间有限,故采用单圆盘旋转式切割器,割幅定为800mm。
本机采用无支撑旋转切割方式,靠刀片高速旋转进行无支撑切割,根据无支承切割,最低极限速度不能低于30 m/s,一般取50~90 m/s[5],线速度选定为50 m/s。割刀选用结构简单、双刃式的直刀,刀口尺寸较小,刀片质量轻;割刀上方安装的割刀罩为圆盘结构,前部切去,以满足割幅;根据割刀旋转方向,割刀罩沿切线开有甩草口[6-9],有利于草的排出以减少再次切割。
3 理论分析及主要参数确定
3.1 旋转刀片运动学分析
刀片上任一点是刀片回转运动和机器前进运动的合成,对地面的轨迹为余摆线[10],刀片刃口线对地面所扫过的面积为余摆带,其带宽与刀片高度相近。当旋转割刀最远点b、d的线速度vg=50m/s、机器前进速度vj=1.43m/s时,其切割图如图3所示。
刀刃上a、b两点的运动轨迹方程为
(1)
(2)
式中R—直刀外端点b、d半径(m),R=0.4m,其刃口长h′=0.045m;
r—刀片内端点(a、c)半径(m),r=0.355;
ω—刀盘角速度(l/s),ω=(vgb+vj)/R;
vgb—割刀b点线速度(m/s),vgb=50;
t—刀盘转过的时间(s);
γ、δ—刀片刃口内外端点与圆心连线的水平夹角(°),γ=6°,δ=5°;
vj—机器前进速度,选用GN121型手拖Ⅳ挡工作,vj=1.43m/s。
3.2 切割器转速n计算
切割器转速n为
(3)
取n=1 250r/min。
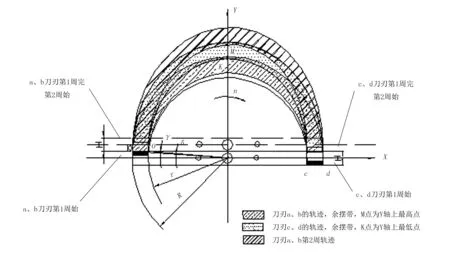
图3 直刀式旋转切割器刀刃运动轨迹图
3.3 刀片切割速度
如图3所示:刀片工作时,刃口a和c点的速度最低,其值为
(4)
当ωt+γ=π+2kπ(k=0,1,2,…,n)时,其最小值为
vamin=rω-vj=45.16m/s
(5)
因vamin大于无支撑切割最低速度30m/s,可满足切割要求。
3.4 刀片数量m计算
(6)
3.5 配套功率
旋转切割器消耗的功率随切割速度vg、机器前进速度vj及作物条件而变化。研究表明:旋转式割草机一般每米割幅所需拖拉机功率为11~15kW,切割器功耗占60%~65%。本机配套于手扶拖拉机,行走消耗功率小,故参考手拖配套旋耕机时的功耗,选用S195或S1100柴油机作为动力,其功率为9kW或11kW。
4 试验结果分析
为了考核割草机是否达到设计要求,按JB/T 9700-2013《牧草收获机械 试验方法通则》[12]的规定和GB/T10938-2008《旋转割草机》[13]的要求,在2009-2010年进行了草坪修剪、小麦秸秆切割及杂草清除的性能试验。试验结果如表1所示。
试验结果表明:在手扶拖拉机Ⅳ挡工作时超茬损失率都为0,平均漏割损失率和割茬高度也都在技术要求范围内,但在低速档工作时重割率偏高。
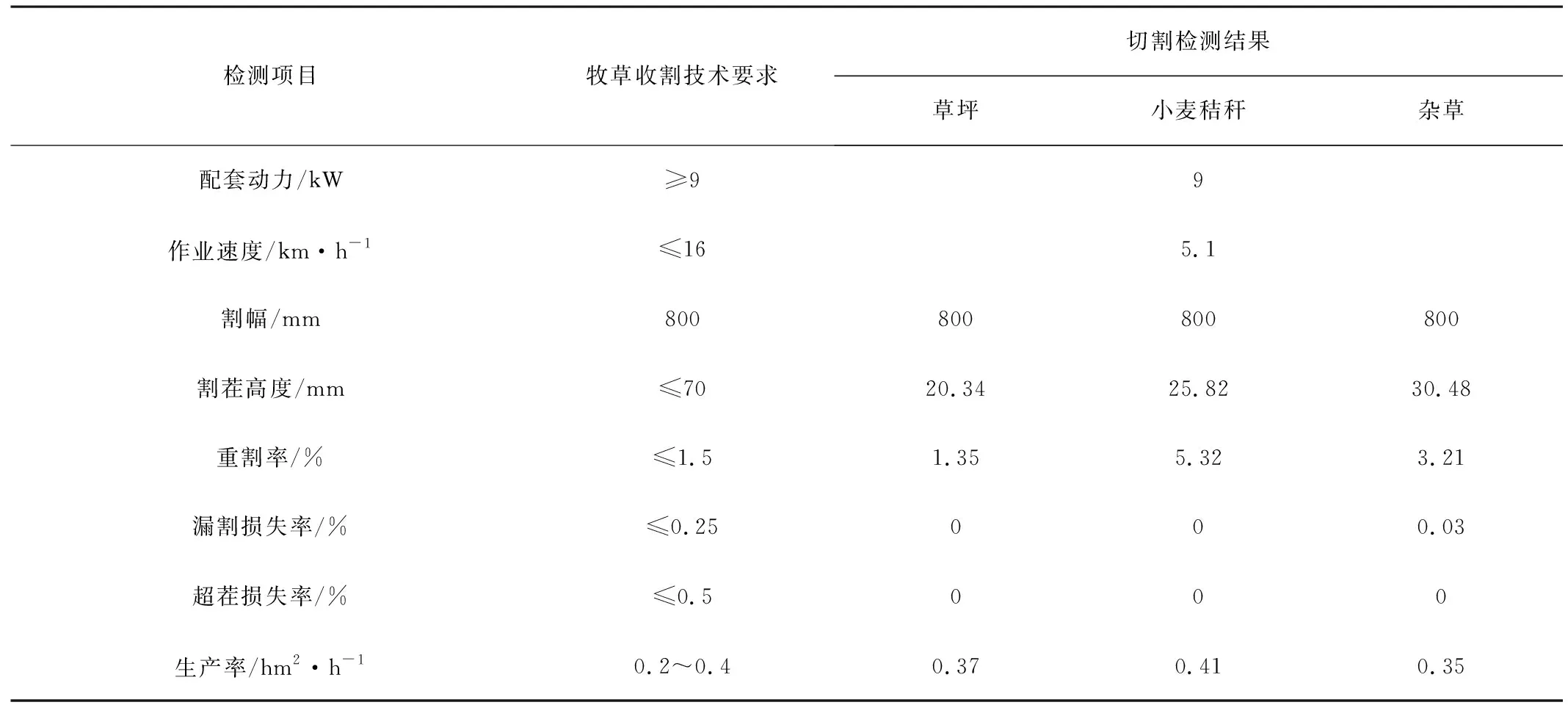
表1 田间作业性能检测结果
5 结论
1)手扶拖拉机配套旋转式割草机增加了手扶拖拉机配套机具,提高了主机利用率,割草机安装方便、配套性好。
2)割草机作业性能良好,切割稳定,割茬整齐,在进行修整草坪时,最低割茬可达到20mm,一般在30~50mm。
3)整机通过性能好,适应性强,能在丘陵、梯田套种田等中小地块上使用。因配套割草机是采用单圆盘,收割后牧草没有铺放成条状,在机具前进速度慢时重割率偏高。所以,不太适宜牧草收割,较适宜联合收获机收获后续的切割秸秆还田作业、杂草的清除和草坪的修剪作业。
参考文献:
[1] 马晓春,于建国.我国牧草收割机的发展趋势[J].林业机械与木工设备, 2005, 33(6):11-12.
[2] 徐秀英,张维强.对我国牧草生产机械化现状及发展机遇的思考[J].中国农机化,2004(3):14-16.
[3] 傅美贞. GN121型手扶拖拉机配套旋转式割草机的研究[D].南京:南京农业大学, 2010.
[4] 浙江四方集团公司.四方牌GN12型手扶拖拉机使用说明书[Z].浙江四方集团公司, 2000.
[5] 中国农业机械化科学研究院.农业机械设计手册:下册[K]. 北京:中国农业科学技术出版社,2007.
[6] 赵春花.手扶式山地牧草收割机研制[D].兰州:甘肃农业大学,2004.
[7] 单春贤, 邵霞, 刘涛,等.小型电动割草机刀盘变形试验分析与仿真[J].农业机械学报,2010,41(12):80-83.
[8] 汪德众,王敦军,齐绍文,等.9GYS-0.85型盘式甩刀割草机的设计[J].农机化研究,2003(1):90-91.
[9] 董晓英.小型果园割草机的研制[J].农机化研究,2001(4):57-58.
[10] 马晓春.割草机的设计与动态特性研究[D].哈尔滨:东北林业大学,2005.
[11] 中华人民共和国工业和信息化部.JB/T 9700-2013牧草收获机械 试验方法通则[S].北京:机械工业出版社,2013.
[12] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会. GB/T10938-2008 旋转割草机[S].北京:中国标准出版社,2008.
猜你喜欢
机械制造(2022年6期)2022-09-01
机械制造(2022年6期)2022-09-01
农业工程学报(2022年5期)2022-06-22
民间故事选刊·上(2022年4期)2022-04-17
民间故事选刊(2022年7期)2022-04-15
科学家(2022年3期)2022-04-11
时代文学·上半月(2019年6期)2019-12-13
环球时报(2019-06-11)2019-06-11
新商务周刊(2018年12期)2018-12-08
无线互联科技(2017年10期)2017-06-22
