
民用飞机惯性基准系统 地面校准研究
2018-07-02 22:35张辉王也
科技传播 2018年11期
张辉 王也
摘 要 IRS的地面校准方法是IRS输出有效参数的重要前提条件,所以对比和研究合适的校准方法意义重大。文章对3种地面校准方法(Absolute,Plumb Bob和Nose Plunge)进行了介绍,并着重对比了前两种方法的原理和精度要求,通过对比分析得出了两种方法的可行性。
关键词 民用飞机;IRS;地面校准
中图分类号 V2 文献标识码 A 文章编号 1674-6708(2018)212-0157-02
在现代民用飞机上,惯性基准系统(Inertial? Reference?System,IRS)作为一个重要系统,已经得到了广泛的应用。IRS和许多飞机上的重要系统有交联,因此其精度的高低会直接影响到飞机上与之交联的重要系统,例如飞控系统等[ 1 ]。“空客”和“波音”两大系列的飞机均装备有IRS,可见其性能的优越性和使用的广泛性。
1 地面校准的意义
IRS作为提供A级功能的系统,其地面校准直接影响到IRS输出参数的正确性,所以研究IRS的地面校准方法意义重大。IRS安装到飞机上之后,需要进行地面校准,这样才能正常工作。地面校准的意义在于将IRS的坐标系与飞机的机体坐标系完全重合,这样IRS才能够输出正确的姿态,航向以及加速度信息,才不至于出现极性错误等较为严重的错误。
2 地面校准的方法及对比
IRS的地面校准有3种方法,分别为Absolute,Plumb?Bob和Nose?Plunge。
Absolute法要求直接测量出飞机当前的姿态角以及真航向角。
Plumb?Bob法相对复杂一些,需要测量的参数较多,如图1所示。将飞机拖到绘制的航向参考线附近(图中HT=260.8048°以及飞机与参考线的相对位置仅供参考,HT為真航向值),将飞机调整为水平状态。机头在航向参考线右侧,测量机头参考点在地面的投影点,到航向参考线的垂直距离D1为正,反之为负;机尾在航向参考线左侧,测量机尾参考点在地面的投影点,到航向参考线的垂直距离D2为正,反之为负;机头和机尾参考点距离为L。需要测量L,D1和D2的值,参考航向HT已知,通过解如下三角函数就可以计算出飞机纵轴线与参考航向的夹角,从而求出当前飞机的真航向角。
Nose?Plunge法是在不能使用Plumb?Bob法的前提下,还需要一些特定的条件,这里就不展开讨论。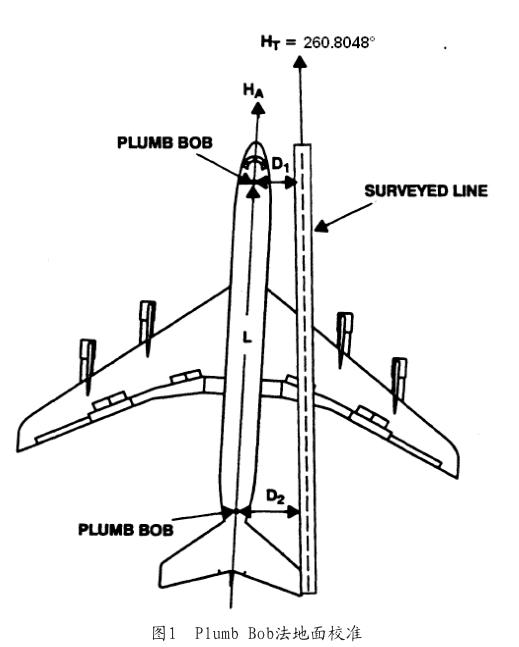
使用Absolute和Plumb?Bob方法校准达到相同的系统精度,所要求的测量精度也不尽相同,详见如表1所示。
通过分析表1所知,两种方法所需的姿态测量精度是一致的。Absolute法需要测量飞机当前的真航向,对工艺要求很高,难点有二,一是为了达到真航向高精度测量,就要确定出飞机更高精度纵轴,这对总体设计和工艺水平的要求极高;其二是即便是确定了高精度且可测量的飞机实体纵轴来测量其真航向值,还需要通过具有资质的测绘院进行测量,每架机的真航向均不同,且每次地面校准均需要重新测量,工序太复杂,且成本高昂。
Plumb?Bob方法需要的图1中的参考航向HT,可以在总装厂房预先画出一条足够长实体线,通过测绘院测出其真航向值。然后将这个实体线作为工装固定,可以重复使用,这样就大大降低了整体的工艺难度,提高了效率,同样节约成本。
地面校准的方法虽然不尽相同,但最终的目的都是要得到飞机当前真实的真航向,再通过计算,将飞机的纵轴与IRS设备任何一个表面的夹角计算出来,传递给IRS并保存。Absolute法中飞机真航向的测量精度为±0.01°,远比Plumb?Bob法中真航向参考线的测量精度(±0.005°)低。究其原因,Plumb?Bob法是通过解三角形来计算出当前飞机纵轴线的真航向角,但是L、D1和D2的测量存在一定误差的,解三角函数本身也会引入计算误差的,所以为了最终飞机当前真航向满足精度,相应的就要提高HT的精度要求。
3 Plumb Bob法L测量考虑
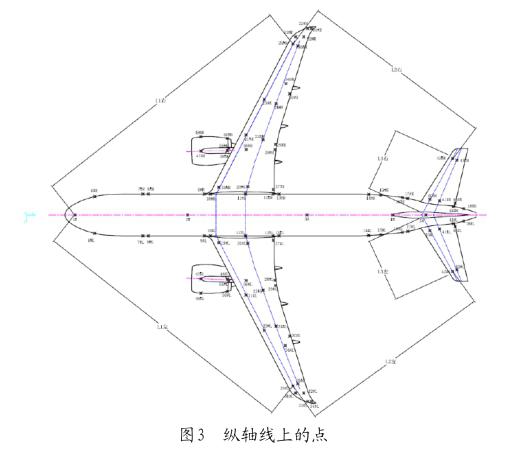
在机身纵轴线上选择合适的水平测量点(如图2和图3所示)。飞机上纵轴上两点的选择有以下几点考量:
1)两个参考点之间的距离L应该尽可能的长。
2)两个点在飞机正下方的垂直投影应该在参考航向基准线的长度范围内。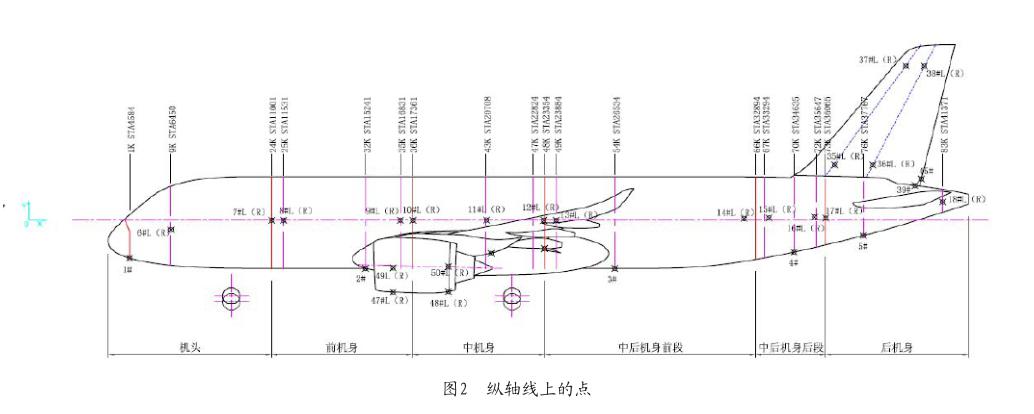
4 结论
综合以上对比和分析,使用Plumb?Bob法对IRS进行地面校准,是比较合理,工艺难度不大,且成本较低的方法。
参考文献
[1]张天光,王秀萍,王丽霞,等.捷联惯性导航技术[M].北京:国防工业出版社,2007.
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16
金属加工(冷加工)(2020年11期)2020-11-24
民用飞机设计与研究(2019年4期)2019-05-21
教学考试(高考地理)(2019年2期)2019-04-24
测控技术(2018年5期)2018-12-09
精密制造与自动化(2018年1期)2018-04-12
江苏教育研究(2016年34期)2017-03-22
环境保护与循环经济(2017年10期)2017-03-16
电子制作(2017年24期)2017-02-02
设备管理与维修(2016年5期)2016-03-16
