
国外新型外界援潜救生装备发展研究
2018-07-02 10:24杨清轩
舰船科学技术 2018年6期
董 鹏,杨清轩,刘 洋
(1.海军装备部,北京 100036;2.中国船舶重工集团公司第七一四研究所,北京 100101)
0 引 言
目前美、英、俄等国外潜艇技术强国进入了外界援潜救生系统换代期,纷纷研制了潜艇救生潜水再加压系统、北约潜艇救生系统、多功能潜水救生系统等新型外界援潜救生系统。
与传统、单一的外界援潜救生装备相比,新型外界援潜救生系统采用了潜水钟、救生潜器、饱和潜水舱、单人常压潜水、ROV等多种外界援潜救生装备,具有部署速度快、任务灵活度高、救援措施多样、系统模块化程度高、维护成本低等突出优点。
1 美国潜艇救生潜水再加压系统(SRDRS)
美国潜艇救生潜水再加压系统(SRDRS)是基于澳大利亚REMORA救生潜器研制的。美国潜艇救生潜水再加压系统中的加压救援模块(PRMS)于2008年9月服役并替代了“神秘”号救援潜器(DSRV-1);2011年,北约与俄罗斯在西班牙卡塔赫纳附近海域举行联合潜艇救援演习,演习中加压救援模块成功与俄海军1艘“基洛”级(B-781)进行连接,并开展模拟潜艇救援,演习中系统表现出良好的通用性和与潜艇连接能力。2017年,水面减压系统(SDS)完成交付,目前潜艇救生潜水再加压系统已形成初步任务能力,并服役于美国海军水下救援部(URC)。
SRDRS由4个分系统组成:评估/水下作业系统、水面减压系统、加压救援模块系统、任务保障装备(包括布放和回收系统)。
水面减压系统、加压救援模块系统、任务保障装备系统组成重约183 t的潜艇救援系统,安装在保障母船上。潜艇救援系统的救援能力系统包括加压救援模块系统和任务保障装备。SRDRS各系统组件布置如图1~图3所示。
1)评估/水下作业系统
评估/水下作业系统由设计潜深为610 m的深海潜水服2 000、遥控潜器和其它相关的保障装备(如深海潜水服管理系统)组成。深海潜水服2 000能够在610 m深海进行作业,内部始终保持一个大气压。评估/水下作业系统是第1个对潜艇失踪或沉没事件进行响应的系统,提供的作业能力包括:对遇险潜艇进行定位、评估遇险潜艇的状况、清除遇险潜艇逃生舱口盖附近区域的障碍、在逃上舱口附近放置信号灯以及补充紧急生命保障补给。
2)水面减压系统
水面减压系统由2个安装在甲板上的水面减压舱和相关的保障装备(如发动机舱、辅助设备舱、备用部件舱和水面减压系统气体瓶架)组成。每个水面减压舱是一个单独的载人封闭压力容器,放置在一个12.2 m的集装箱内,最多能够容纳33人。水面减压系统的主要功能是对遇险潜艇艇员进行减压控制,确保他们一旦返回常压环境以后,免受严重或者致命的潜水减压病。
3)加压救援模块系统
加压救援模块系统的一个主要组件是加压救援模块。加压救援模块是一个带有脐带的,载人遥控作业型救援潜器,由一个位于开放式结构内的水平圆柱形耐压壳体、各种系统以及各种装备(如生命力保障系统和推进器)组成,导航、视频、推进和生命力保障系统安装在框架和耐压壳体的外面。加压救援模块由固定在母船甲板上的控制系统来进行遥控控制。控制站的驾驶员和导航员负责加压救援模块的导航、机动、下潜/上浮以及对接作业。在控制站内有一位潜水监管人员负责监管加压救援模块的所有作业,2名潜器艇员跟随加压救援模块协助遇险艇员的转移,每次作业最多可以转移16名艇员。潜器艇员也可以控制和监视加压救援模块的生命保障装备,并协助打开及确保加压救援模块和遇险潜艇舱口盖的安全。
4)任务保障装备
任务保障装备是指在潜艇救援作业期间保障加压救援模块系统的一系列系统组件。任务保障装备的主要组件包括布放和回收系统、脐带管理系统、舰船界面模版装置以及甲板支架,为加压救援模块系统和水面减压系统的组件之间提供了合适的界面。
布放和回收系统是位于船尾部的一个A型框架,集成了一个指示器及用于加压救援模块布放和回收的双重升力补偿起重线绞盘。该指示器提供了一个自动保险锁定装置,能够与加压救援模块在30°的误差范围内实现水下对接。这种设计的主要好处是简化了回收操作过程,可以在水下实现对加压救援模块的锁定,避免受到海面波浪的影响。为了减弱冲击载荷并确保加压救援模块操作的安全,布放和回收系统装备了主动和被动升力补偿系统。布放和回收系统装备一个布放加压救援模块的锁定组件,可以在回收作业期间对加压救援模块的倾斜进行主动控制,确保加压救援模块在甲板支架上实现精确着落。
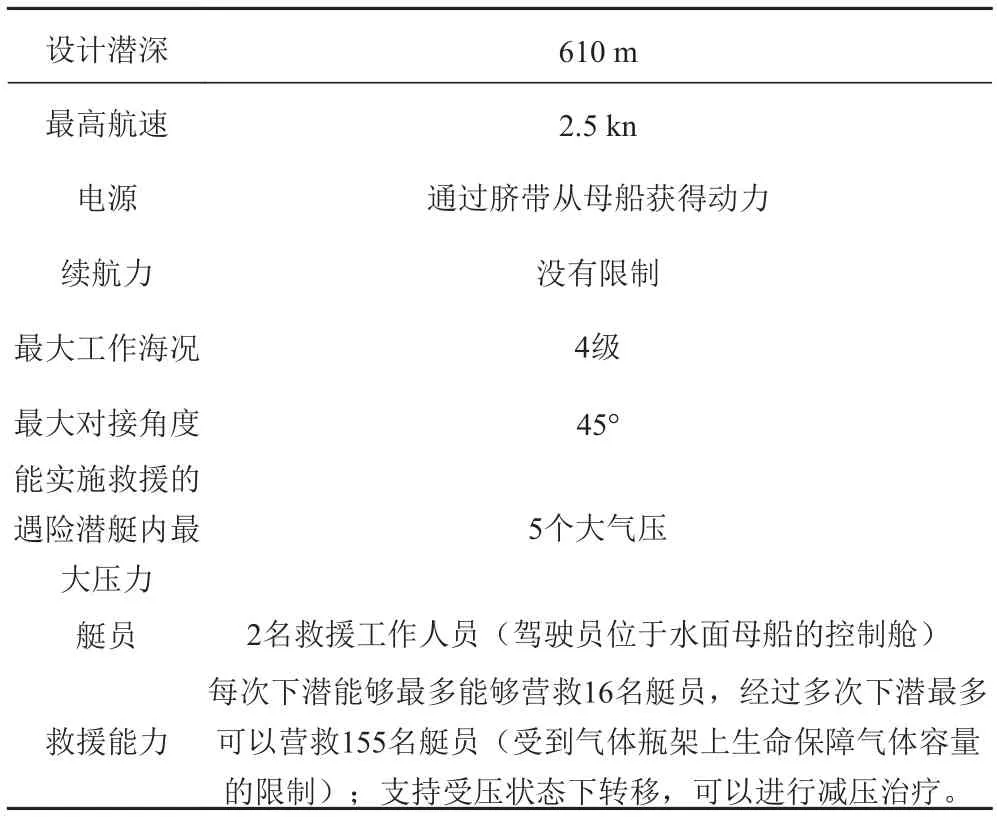
表1 SRDRS主要性能参数Tab.1 SRDRS main performance parameters
5)技术特点
具有受压状态下转移的能力。SRDRS最重要的一个特征就是具有保障受压状态下转移的能力,可以使幸存者从遇险潜艇中转移到救援潜器中,然后直接进入水面保障母船上的减压舱,在这期间,始终保持着与遇险潜艇内部相同的压力,避免遇险艇员受减压疾病的威胁。水面减压系统目前正处于海军的采购计划中,计划于2012年交付,将与潜艇救援系统一起部署,安装在水面保障母船上,用于保障受压状态下转移,并对遇险潜艇中的幸存艇员实施减压控制。
强大的救援能力。除了受压状态下转移的保障能力外,SRDRS的行动概念包括通过多次下潜,可以从1艘遇险潜艇中最多营救155名遇险艇员。SRDRS的加压救援模块一次可以容纳16名遇险艇员和2名潜器艇员。
先进的电子系统。SDRDS其它先进的功能包括现代高性能ROV所具有的综合导航系统和自动控制功能。这2种功能组合在一块可以使救援潜器实现精确的位置监测和控制、位置保持、深度及遇险潜艇逃生舱口上方的首向和高度的自主控制等。
2 北约潜艇救生系统(NSRS)
北约潜艇救生系统(NSRS)由英国、法国、挪威3国联合研制,英国国防部负责北约潜艇救援系统所有合同的管理,并指定罗尔斯·罗伊斯公司作为整个救援系统设计、建造和运行的主承包商。Perry Slingsby系统公司主要负责救援潜器和干涉遥控潜器的设计和建造,Divex公司负责受压状态下转移系统,工程商业公司负责布放和回收系统。
2008年3月,潜艇救援系统(NSRS)在挪威海域成功完成海试。目前北约潜艇救援系统(NSRS)由英国、法国、挪威三国共同管理,并部署在苏格兰法斯兰的克莱德基地。潜艇救援系统(NSRS)已成功完成了多次“勇猛君主”等北约以及欧洲国家间组织的援潜救生演习。在2017年1月英国与挪威进行的联合援潜救生演习中就采用了北约潜艇救生系统。
北约潜艇救援系统的设计服役期为25年,系统主要由干涉系统和救援系统2个子系统组成:干涉系统是一个相对较小的子系统,主要由一个干涉遥控潜器组成,能够快速部署到潜艇遇险地点,为救援做现场准备工作,并提供生命保障;救援系统是一个较大的子系统,由一个自航救援潜器、便携式发射和回收系统、受压状态下转移系统和其他相关的保障装备组成。
北约潜艇救援系统组成如下:
1)干涉系统
干涉系统是一个独立的系统,通常情况下作为第一个系统进行部署,主要由干涉遥控潜器及其保障装备组成。干涉遥控潜器的保障装备包括一个A型的布放和回收系统、绞盘和脐带、控制舱、导航和跟踪装备、发电装置。
干涉系统负责潜艇救援第一阶段的任务,包括在干涉遥控潜器的帮助下对遇险潜艇进行定位,清除阻塞逃生舱口的障碍并探测核辐射,使用水下电话或其他方式与遇险艇员建立通信,如果有需要的话,立即采取措施稳定遇险潜艇上的状况,并为等候救援的艇员提供包括氧烛、二氧化碳洗涤器、医疗补给品、食物、饮用水等在内的紧急生命救助物资。
2)受压状态下转移系统
救援潜器一旦回到母船,幸存艇员就被转移到受压状态下转移系统,在那里进行必要的减压治疗。受压状态下转移系统由1个甲板转移舱、2个大型减压舱以及相关的保障装备组成,总的重量约120 t。保障装备有氧气运输模块、工作车间、控制舱以及环境控制。减压舱内包括环境控制设施、氧气储存和复杂的控制中心,减压舱包括可以容纳30人的主舱室和相对较小的医疗舱,医疗舱可以容纳6人或者2副担架。转移舱可以容纳12人。
受压状态下转移系统可以提供一个封闭的操作空间,使幸存艇员避免受到气候和海洋环境的影响。该系统可以分别在每个减压舱进行2种进度不同的减压治疗,并且可以使用便携式的2人减压舱,在1名工作人员的帮助下对伤员进行转移和治疗。
3)便携式导航、跟踪和通信系统
便携式导航、跟踪和通信系统位于一个集装箱内,用于跟踪北约潜艇救援系统的水下装置,并用于救援潜器与遇险潜艇之间的通信。采用一种便携式声学定位系统和部署系统,救援小组可以在主要的装置之间,包括救援潜器、干涉遥控潜器、遇险潜艇和母船,进行定位和导航。集装箱内还装备了卫星通信、甚高频、超高频、水下电话、水下调制解调器以及与救援潜器连接的微细光纤脐带的界面。
4)救援系统
救援系统主要包括潜艇救援潜器、便携式发射和回收系统、受压状态下转移系统,以及相关的保障装备。救援系统负责潜艇救援第2阶段的任务,包括使用救援潜器对幸存艇员实施救援,并使用安装在水面母船上的受压状态下转移系统对救援上来的幸存艇员进行减压治疗。救援潜器能够在610 m的深海对遇险潜艇进行定位并实现对接。在进行压力补偿后,救援潜器一次最多可以转移15名遇险艇员。潜艇救援潜器回到水面的母船后,通过操作甲板支架使救援潜器与受压状态下转移系统进行对接,对受压状态下的艇员进行转移和安全的减压,同时救援潜器进行下一次的下潜救援。
5)技术特点
采用高性能电池。北约潜艇救援系统的救援潜器装备了“斑马”电池,代替了以前深潜器使用的铅酸电池。“斑马”电池采用了钠-氯化镍电池单元,能量密度很高。相比同样的铅酸电池,“斑马”电池模块能够多提供约100%的能量,而重量却只有铅酸电池的60%左右。救援潜器约102 kW·h的能量用于主动力系统、电力推进以及水动力系统,超过34 kW·h的能量用于仪器的使用、控制、通信以及生命保障系统。这么多储存的能量可以容许安装大功率的系统,且不会因此减小任务持续时间,或者在不需要大功率系统的情况下,延长执行任务的时间。
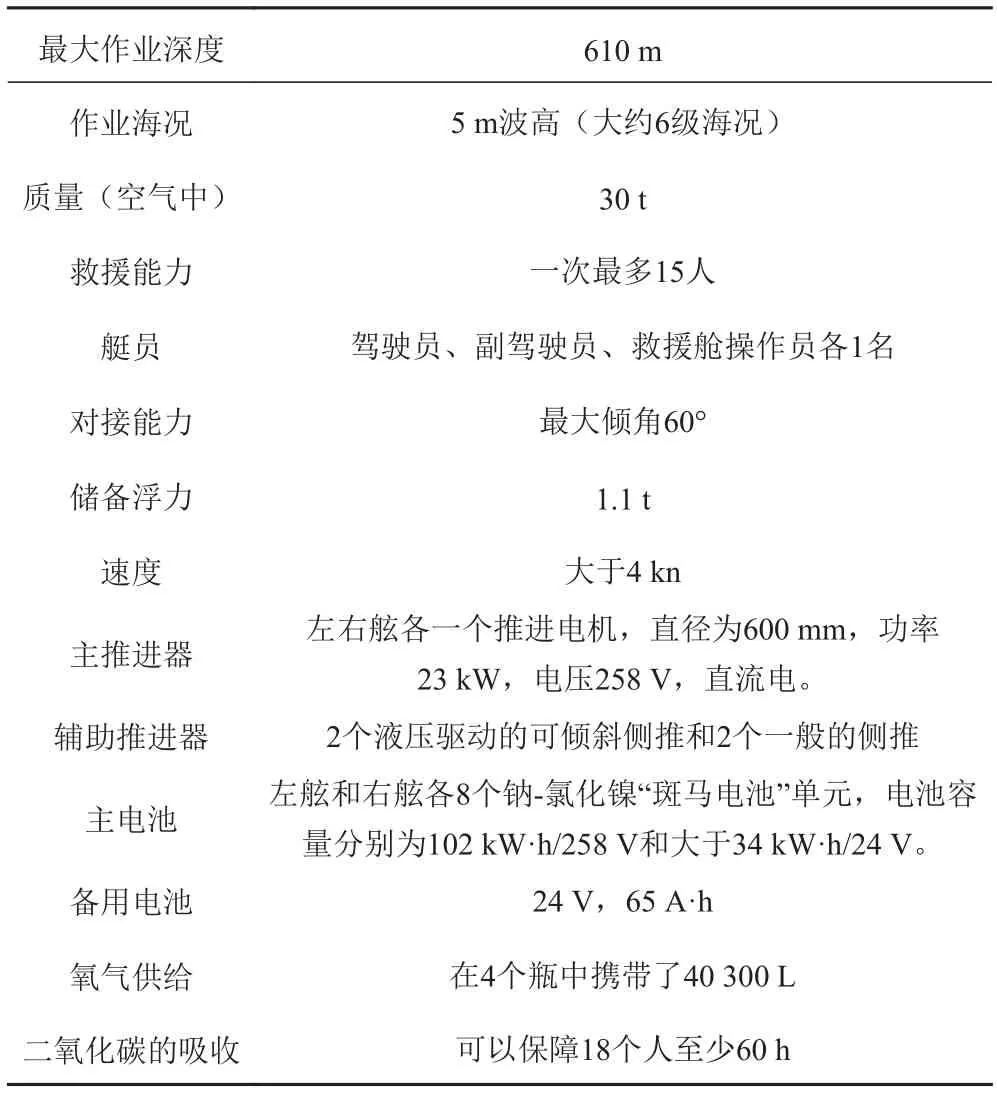
表2 救援潜器的主要性能参数Tab.2 NATO submarine rescue system main performance parameters
具备高质量的音频、视频和声呐通信能力。北约潜艇救援系统的救援潜器通过一根直径为5 mm的光纤与母船相连,可以保证进行高质量的音频、视频和声呐通讯,消除了更大、更重的脐带连接所带来的不便。光纤可以使救援潜器独立于母船的水面运动,并且由于直径较小,产生作用于救援潜器的水流拖曳力很小。另一个关键的好处是在救援潜器陷入潜在的纠缠期间,由于光纤的断裂载荷只有400千克力,舰载切割器或者救援潜器主推进力或辅助推进力将可以切断脐带。在脐带损坏或者断裂的情况下,救援潜器的通信回归到“水声通信”来维持救援潜器完整的操作能力。
能在高海况下进行部署和回收。北约潜艇救援系统最大的进步就是执行没有潜水员的回收作业,从而可以在高海况下进行救援。没有潜水员的回收需要2个步骤:首先在救援潜器与母船之间建立连接,然后使用这个连接回收救援潜器。连接的方法是:首先在水面母船的帮助下,在海床上部署一个重物快,然后救援潜器通过一根小直径的缆线与重物块建立连接,救援潜器和重物块一起浮出水面。小直径的缆线与布放和回收系统相连接,当缆线绷紧后,一个与起重线相连的捕捉锁定装置就放到水面上,捕捉并锁住救援潜器,然后提升救援潜器,救援潜器的回收就完成了。
3 俄罗斯多功能潜水救生系统
经过“库尔斯克”事件这一惨痛的潜艇事故,俄罗斯防救部门下决心解决俄国内援潜救生装备性能不足、功能单一的问题,并开展了多功能潜水救生装备系统——伊戈尔·贝洛索夫型援潜救生船研制工作。整个系统包括饱和潜水系统、遥控无人潜器、潜水钟、吊放装置及其他辅助系统等模块,采用模块化设计、标准集装箱装载。除援潜救生外,该系统还能完成水面救援、海洋环境调查、深海打捞作业等任务。
伊戈尔·贝洛索夫型援潜救生船在2005年于圣彼得堡海军部造船厂建造,2012年10月下水,2015年11月服役俄罗斯太平洋舰队。其搜救设施主要包括作业深度达450 m的GVK-450型潜水钟;救生工作深度高达700 m,6人操作、最多可容纳22名逃生人员的Bester型救生潜器;饱和潜水减压舱以及潜深达1 000 m的ROV系统。
4 结 语
水下救援装备体系化发展,援潜救生可采用多种救援措施。从美、英、俄新一代援潜救生装备发展来看,既有负责救人的救援潜器、潜水钟,也有负责救援准备工作或输送给养的遥控潜器,美国甚至还装备了失事潜艇定位和状态评估的HARD SUIT2000TM常压潜水系统。可见国外水下救援装备呈体系化发展,援潜救生可采用多种救援措施,这些系统协同工作是救援系统发挥出最大的救援效能。其中美国和英国的水下救援装备是成体系发展的,这些装备分工明确、紧密协作,根据不同的失事水深,采用不同的救援装备,使全部救援装备在救援作业中均发挥出了最大效能。

表3 伊戈尔·贝洛索夫型援潜救生船性能参数Tab.3 Igor Belosov type submarine rescue ship main performance parameters
搭载平台多样化,摆脱对专用母船的依赖。美英新一代援潜救生装备均摆脱了对专用搭载平台的依赖,可由多种平台搭载可提高救援响应能力和救援效率;缩短救援系统部署时间,尽快到达失事地点,实施救援。其中北约潜艇救援系统可搭载在140种船的甲板上,美国潜艇救援潜水再加压系统不需要专用的母船或改装潜艇搭载,2个救援系统均可在多种平台上完成调度和安装。这与美国“神秘”号救援潜器和英国LR5潜器需要专用的搭载母船不同,摆脱了对专用母船的依赖,提高了救援响应能力和救援效率。
自动化程度高,控制更灵活。美英新一代援潜救生装备自动化程度高,以高效、灵活操控各种援潜救生装备。其中美国潜艇救援潜水再加压系统的承压救援模块系统自动控制包括自动定深、自动定向、自动定高、自动定位、对接裙自动角度复位、巡航控制、纵横倾和偏航控制以及均衡调整等。潜器系统的状态显示在主图形用户界面的屏幕上,驾驶员或导航员选择的任意显示可以实现视频叠加。图形用户界面是多页的,设有用于系统调整、报警以及故障查找的弹出菜单。通过驾驶员的操纵杆控制操纵和摄像头功能,操纵杆固定在根据人机工程学设计的座椅的扶手上。触摸屏和带有控制球的键盘用于菜单选择、系统操纵和显示控制。
[1]Delivery and Deployment of the U.S.Navy’s Submarine Rescue System[C].2008.
[2]The Application of Classification to the U.S.Navy Submarine Rescue System[C].2010.
[3]NAVY DIVING POLICYAND JOINT MILITARY DIVING TECHNOLOGY AND TRAINING PROGRAM[C].Jun 2016.
[4]Rebreathers and Scientific Diving.February [J].2015.
[5]Tagung der Studiengruppe elektronische Instrumentierung imFrühjahr[C].2014.
[6]VIKING OWNER’S MANUAL[C].2015.
[7]DEEP DIVING IN BRAZIL’S CAMPOS BASIN[C].2014.
[8]Latest Control and Automation Applied to the Modern DSV[J].2015.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
环球时报(2020-04-01)2020-04-01
船舶标准化工程师(2019年5期)2019-11-11
中国水运(2019年9期)2019-09-28
舰船电子工程(2019年7期)2019-08-05
作文大王·笑话大王(2018年4期)2018-05-21
数学大王·低年级(2017年8期)2017-08-04
学苑创造·A版(2017年7期)2017-06-24
文理导航·趣味课堂(2016年6期)2016-09-09
