
深海会聚区目标探测机动方法研究
2018-07-02 10:24唐帅,韩梅,张驰
舰船科学技术 2018年6期
唐 帅,韩 梅,张 驰
(海军潜艇学院,山东青岛 266199)
0 引 言
在深海环境中,会聚区是水声传播最显著的特点之一,当声源和接收器都位于海洋近表层时,海面声源发射的声波形成一个向下的波束,这一波束沿着深海折射路径传播后,重新出现在近海面,在距声源数十公里处产生一个声强较高的环带状区域,称为会聚区[1],该现象随着距离的增大反复出现。会聚区现象使得声呐作用距离可能增加至几十海里,甚至100余海里。因此在这些海区,无论是搜索和发现能力、隐蔽性能及其战术机动方法,与在浅海环境下相比,都会有很大的变化。很多学者对会聚区中的声传播特征及其应用进行了广泛的研究[2–9],但对于深海会聚区目标探测机动方法则相对较少。为此,在深海会聚区内,如何有效利用会聚区环境效应,采用合理的机动方法,提高目标探测能力,是充分利用会聚区环境效应实施作战的重要前提。
本文在介绍会聚区形成条件及会聚区态势判断方法基础上,建立了会聚区目标探测模型,研究了不同态势下会聚区目标机动探测过程,并通过数值仿真,定量分析了探测方与目标之间距离随时间的变化规律,并结合海上实验数据进行了验证分析。
1 深海会聚区声场
1.1 会聚区形成条件
当声源和接收器两者都置于声道内,并且海水的深度必须足够大是形成会聚区的2个必要条件。此时传播至海洋深处的声线发生折射,不触及海底而聚焦在一起。因此对于给定声速剖面存在一个产生会聚区的最小海水深度,即临界深度。临界深度以下到海底的深度距离称为深度余量,如图1所示。
1.2 深海会聚区目标态势判定
对于深海会聚区目标,由于接收器距离声源较远,信号出现时间较短,方位变化率又比较慢,导致会聚区目标的判别以及目标运动态势判断都存在较大的困难,这也在一定程度上限制了会聚区环境应用。文献[10]中,提出了利用会聚区距离-频率干涉条纹特征,如图2所示,实施会聚区目标判定及目标运动态势判断的方法,通过仿真结果和海试数据初步验证了方法的有效性。
2 深海会聚区目标探测机动分析
2.1 会聚区机动探测模型
为了分析舰艇在会聚区探测过程的机动方式,首先建立坐标系,以便于描述舰艇和目标的海上运动,然后构建各要素的数学模型进行分析。在直角坐标系下,初始时刻,舰艇位于W0,坐标位置为原点,航向为Cw0,航速为Vw,目标初始方位为B0,距离为D0,目标位于M0,坐标位置(Xm0,Ym0),航向为Cm,航速为Vm;t时刻,舰艇位于W1,坐标位置(Xw,Yw),航向为Cw,航速为Vw,目标位于M1,坐标位置(Xm,Ym)。假设目标航向,航速保持不变;会聚区距离为R,会聚区宽度为W,会聚区探测机动示意图如图3所示。
初始时刻记为0时刻,舰艇初始位置为原点,t时刻舰艇位置可表示为
目标初始位置利用相对于舰艇的方位和距离进行描述,记为
则t时刻目标位置位于
舰艇如何通过机动延长会聚区探测时间,其问题实质是舰艇通过机动,使舰艇与目标尽可能长时间的保持在会聚区范围内。因此,首先讨论机动过程中,舰艇与目标之间距离随探测时间的变化关系。
将舰艇与目标间距离记为时间函数,根据两点间距离公式,t时刻舰艇与目标间距离可表示为,
为了分析舰艇与目标间距离随时间的变化,对初始态势进行一定假设。假设本艇速度不变,发现目标后保持初始航向Cw0,时刻调整航向为Cw1,此处忽略舰艇转向时间。则式(7)可表示为:
整理得
其中:
对时间t的1阶、2阶导数分别表示为:
2.2 典型态势模型分析
下面针对不同参数组合,对舰艇与目标间距离随时间的变化关系进行讨论。
1)当时,舰艇与目标间距离随时间的变化关系满足线性关系。对参数A进行分析,只有满足时,;将条件代入参数B表达式,可得,,所以,,示意图如图4所示。因此,当舰艇与目标同向、同速时,舰艇与目标间距离随时间的变化为常数,即两者间距离保持不变,且只与初始态势有关。
2)当时,舰艇与目标间距离随时间的变化关系满足抛物线关系。根据抛物线性质及参数意义可知,参数影 响抛物线的开口,其中,的符号影响开口方向,的大小影响开口大小;参数和影响抛物线的位置,其中,影响抛物线的左右位置,影响抛物线的上下位置;同时,与决定抛物线对称轴位置,对称轴,示意图如图5所示。
利用式(9)可以得到t时刻距离函数与初始时刻变化量,即
在实际探测过程中,参数、和取决于舰艇与目标的运动要素,当初始态势确定后,,和为常数,可以得出,
2.3 模型特征参数分析
结合抛物线参数意义进一步对会聚区内舰艇与目标间距离变化特点进行分析。
1)抛物线开口方向
从参数A的表达式可以看出,,此时舰艇与目标间距离随时间的变化规律应为开口向上的抛物线。满足这种变化关系,说明舰艇与目标之间距离随时间的变化存在最小值点,该点即为抛物线顶点。因此,会聚区内舰艇与目标之间距离随时间变化可以通过抛物线对称轴位置t=−B/2A划分成2类情况:
第1类:当t=−B/2A>0时,A>0,所以B<0,此时,两者距离先减小后增大,即舰艇与水面舰之间初始处于接近态势,在某一时刻接近到最小距离,随后处于远离态势,在该类情况下,目标又存在一次穿越会聚区或两次穿越会聚区2种可能性,当初始态势确定后,存在目标临界舷角Qml,对应目标航向如图6中H1。
当目标舷角>Qml时,目标一次穿越会聚区,如图6中H2航向。目标一次穿越会聚区,是指目标与舰艇间的距离最小值Rmin>会聚区距离R,如图7(a)所示。当舰艇与目标距离减小到Rmin后,两者距离逐渐增大,处于远离态势,脱离会聚区范围,若两者运动要素保持不变,则目标不会再次穿越同一会聚区。
当目标舷角<Qml时,目标2次穿越会聚区,如图7中H3航向。目标2次穿越会聚区,是指目标与舰艇间的距离最小值Rmin<会聚区距离R,如图7(b)所示。当舰艇与目标距离减小到Rmin时,已经完成第1次穿越会聚区,然后两者距离增大,处于远离态势,目标将再次穿越同一会聚区。
第2类:当t=−B/2A=0时,因为A>0,所以B=0,此时,两者初始时刻距离最近,随后距离随时间一直增大,即舰艇与水面舰之间始终处于远离态势,如图8中H4航向。
2)抛物线开口大小
根据参数意义可知,参数B和C相同的条件下,当A越大时,抛物线开口越小,图像越陡峭,与会聚区区域重叠部分越小,舰艇探测目标时间越短;A越小时,抛物线开口越大,图像越平缓,与会聚区区域重叠部分越大,舰艇探测目标时间越长。然而当参数B和C不同时,则抛物线与会聚区区域重叠部分,不仅仅依赖于抛物线开口大小,还与抛物线的位置有关,即与舰艇和目标的初始态势有关。
3)抛物线与坐标轴交点
根据参数意义可知,参数B2−4AC决定了抛物线是否与横轴相交,对于会聚区内目标,舰艇与目标之间的距离限定在会聚区范围之内,其距离变化曲线不会与横轴产生交点;对于穿越会聚区并与舰艇处于接近相遇态势的目标,其距离变化曲线会与横轴产生交点。参数C决定了抛物线与纵轴的交点,即(0,C),即表示舰艇与目标之间的初始距离。
3 仿真与试验数据验证
3.1 仿真验证
仿真条件见表1。
1)会聚区目标处于接近运动态势
当目标航向变化角Qm较小时,即舰艇位于目标小舷角时,目标2次穿越会聚区的概率较高,此时目标与舰艇间的距离最小值Rmin<会聚区距离R,式(13)中,Δf=W,与初始态势无关,2个解分别对应目标第1次穿出会聚区时间和第2次进入会聚区的时间,此时,舰艇探测目标时间随舰艇舷角Qw增大而延长,即舰艇进行机动将目标置于声呐最大可听测舷角Qwmax进行跟踪,目标探测时间最长;大舷角机动的同时增加舰艇速度,可以进一步延长探测时间,当如图9(a)所示,舰艇速度Vw=2 kn时,将目标置于声呐最大可听测舷角进行机动,相对于将目标置于最小可听测航向进行跟踪探测时间延长2.2 min;舰艇速度Vw=10 kn时,将目标置于声呐最大可听测舷角Qwmax进行机动,相对于将目标置于目标最小可听测航向Qwmin进行跟踪探测时间延长12.4 min,可见,接近态势下,提高舰艇机动速度,更有利于舰艇通过机动延长目标跟踪时间。
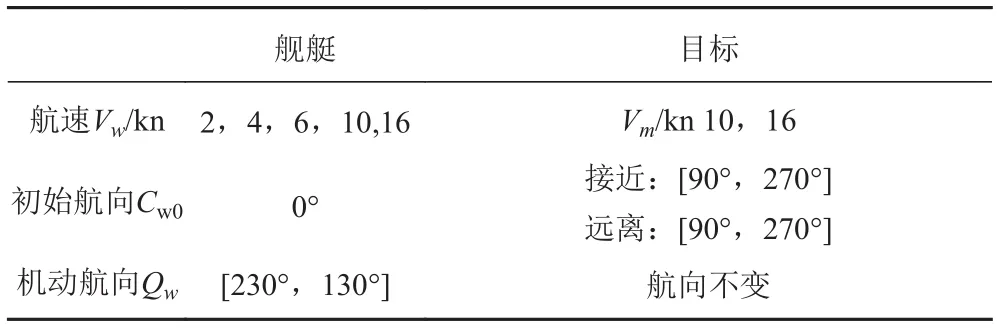
表1 仿真参数列表Tab.1 Simulation parameter list
当目标航向变化角Qm增大后,即舰艇位于目标大舷角时,目标穿越1次会聚区的概率较高,如图10所示。此时目标与舰艇间的距离最小值Rmin>会聚区距离R。当舰艇低速机动时,目标探测时间随舰艇舷角Qw增大而减小;舰艇将目标置于小舷角进行跟踪,速度越大,目标2次穿越会聚区的概率越高,探测时间越短;舰艇将目标置于大舷角Qwmax进行跟踪,速度越大,目标1次穿越会聚区的概率越低,探测时间越短,如图9(b)所示。
2)会聚区目标处于远离运动态势
通过仿真结果可得出以下结论:
当目标航向变化角Qm较小时,即舰艇位于目标大舷角时,即舰艇处于尾追目标态势,舰艇探测目标时间随舰艇舷角Qw增大而减小,即舰艇将目标置于最小可听测舷角Qwmin航向进行跟踪,目标探测时间最长;保持最小可听测舷角航向机动的同时增加舰艇速度,可以进一步延长探测时间,当如图11(a)所示,舰艇速度Vm=2 kn时,将目标置于最小可听测舷角Qwmin航向进行跟踪,相对于将目标置于最大可听测舷角跟踪时间延长2.4 min;舰艇速度Vm=10 kn时,将目标置于最小可听测舷角Qwmin航向进行跟踪,相对于将目标置于最大可听测舷角跟踪时间延长22 min,可见,远离态势下,提高舰艇机动速度,同样有利于舰艇通过机动延长目标跟踪时间。
2)当目标航向变化角Qm增大后,即舰艇位于正横附近时,舰艇将目标置于最小可听测舷角Qwmin航向进行跟踪,目标探测时间最长,舰艇探测目标时间随舰艇舷角Qw增大而减小;随着舰艇速度的增加,目标最小可听测舷角Qwmin增大,当Qw<Qwmin时,舰艇与目标之间初始阶段不满足远离态势;当Qw>Qwmin时,舰艇与目标之间处于远离态势,将目标置于最小可听测舷角Qwmin航向进行跟踪,目标探测时间最长,如图11(b)所示。
图12给出了目标速度不同时,即Vm分别为10 kn或16 kn,会聚区远离目标,舰艇选择不同航速、航向时,潜艇探测目标时间对比图。通过对比可以看出,其他要素相同时,舰艇对低速目标的探测时间更长,通过机动延长探测时间的效果更为明显。
3.2 试验验证
结合某次海上试验数据,对深海会聚区内目标机动方法进行检验。试验海区海深近6 000 m,为典型深海声速剖面,有足够深度余量,能够形成会聚区,第一会聚区距离为33 nmile左右,会聚区宽度3 nmile左右,满足试验验证条件。试验开始前,舰艇测量声速梯度,声速梯度测量完成后,开始机动;目标按试验方案机动,并记录航行要素及周围目标情况。具体舰艇与目标机动要素如表2所示。

表2 海上试验验证结果Tab.2 Marine test results
第1航次,舰艇发现目标后,采用最小可听测舷角Qwmin航向,目标噪声持续10 min,第3航次,目标处于接近过程中,舰艇发现目标后,采用最大可听测舷角Qwmax航向,与目标舰接触时间为12 min,相对于第1航次延长2 min,试验结果与理论分析结果一致。
第2航次,舰艇发现目标后,采用最小可听测舷角Qwmin航向,目标噪声持续13 min,第4航次,舰艇发现目标后,采用较大可听测舷角航向,与目标舰接触时间为11 min,相对于第2航次缩短2 min,试验结果与理论分析结果一致。
4 结 语
本文介绍了舰艇利用会聚区实施探测的条件及利用会聚区波导干涉条纹特征实施会聚区目标判定及目标运动态势判断的方法,研究了舰艇利用会聚区探测机动方法,分析了针对会聚区不同运动态势目标,舰艇搜索目标和摆脱跟踪的机动方法,在深海会聚区实际应用中,当发现目标,并判断为会聚区目标及目标运动态势后,机动方法应遵循以下原则:1)搜索目标:在接近态势下可采用最大可听测舷角航向并适当增速;在远离态势下,可转向最小可听测舷角航向,增速跟踪;2)摆脱跟踪:在接近态势下可采用最小可听测舷角航向并适当增速;在远离态势下,可转向最大可听测舷角航向,增速摆脱,并通过仿真和试验验证了方法的有效性。
[1]JENSEN B, KUPERMAN W A, PORTER M B, et al.Computational ocean acoustics(second edition) [M].American Institute of Physics, 2011: 21-23.
[2]KIMBERLY M F.Improving accuracy of acoustic prediction in the philippine sea through incorporation of mesoscale environmental effects[R].AD Report.Naval Postgraduate School.2008: 6.
[3]TOBY E S.Improving underwater vehicle communication in the littoral zone through adaptive vehicle motion[J].(A).J.Acoust.Soc.Am.125, 2581, 2009.
[4]李玉阳, 笪良龙.海洋锋对深海会聚区特征影响研究[J].声学技术, 2010(6): 78–79.LI Yu-yang, DA Liang-long.Research on the effects of ocean front on characteristics of convergence zone[J].Technical Acoustics, 2010(6): 78–79.
[5]STEPHEN D L.Dependence of the structure of the shallow convergence zone on deep ocean bathymetry[J].(A).J.Acoust.Soc.Am.127, 1962, 2010.
[6]KEVIN D H.Detection performance modeling and measurements for convergence zone (CZ) propagation in deep water(A)[J].J.Acoust.Soc.Am.130, 2530, 2011.
[7]STEPHEN D L.Investigating sources of variability of the range and structure of the low frequency shallow convergence zone (A)[J].J.Acoust.Soc.Am.130, 2555, 2011.
[8]SONG H C.Diversity combining for long-range acoustic communication in deep water[J].J.Acoust.Soc.Am.132,EL68, 2012.
[9]KEVIN D H.Towed array propagation measurements and modelling in the Philippine Sea (A)[J].J.Acoust.Soc.Am.131, 3353, 2012.
[10]唐帅, 笪良龙, 徐国军, 等.深海会聚区波导不变量特征研究及应用[J].海洋科学, 2014(7): 82–85.TANG Shuai, DA Liang-long, XU Guo-jun.Research on waveguide invariant characters and application in deep-ocean convergence zone[J].Marine sciences, 2014(7): 82–85.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
社会科学战线(2022年4期)2022-06-15
科技与创新(2021年24期)2022-01-03
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国外汇(2019年16期)2019-11-16
军事运筹与系统工程(2019年3期)2019-08-13
当代陕西(2019年12期)2019-07-12
民用飞机设计与研究(2019年4期)2019-05-21
