
城轨列车再生制动振荡抑制策略研究
2018-06-30 06:58:00方晓春贾兆欣杨中平
铁道学报 2018年6期
方晓春,贾兆欣,杨中平,林 飞
(北京交通大学 电气工程学院,北京 100044)
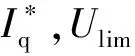
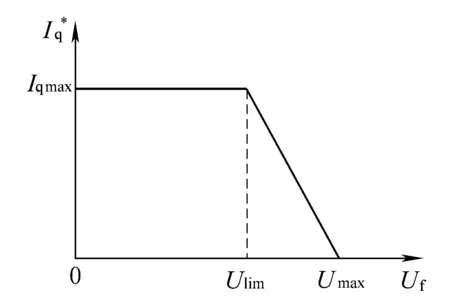
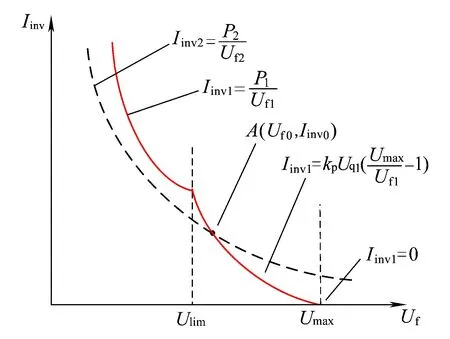
图1 再生制动限流曲线
图1所示限流曲线的Umax受限于牵引变流器电压等级等条件,需设定为恒值。直流供电网的线路阻抗会造成再生制动能量的传输损耗。牵引车距离再生车越远,压降越明显。设定Ulim接近Umax有利于减少线路损耗。然而Ulim越接近Umax,限流曲线斜率就越大,等效于再生制动限流控制的比例增益越大,进而影响系统控制稳定性。再生制动列车的变流器直流侧可能出现电压过冲而引发过电压保护,导致再生失效。此外,也可能引起直流侧电压和牵引电机电流的持续振荡[3-5]。
为抑制再生制动限流控制引发的传动系统电压、电流振荡,文献[3]根据列车工况调整限流曲线,使得系统总是运行在图1所示Ulim左侧区域,不再进行电流指令逐渐下降的限流控制,从而消除了振荡。文献[4]建立系统小信号模型,分析振荡机理,提出了调整控制器参数进行振荡抑制的方案。文献[3-4]中,消耗再生能量的牵引列车被简化为电阻,牵引列车对系统稳定性的影响没有得到充分考虑。城轨列车传动系统直流侧电压、电流振荡机理与抑制策略研究主要集中在牵引工况[6-10],其中的建模与分析方法值得借鉴。
本文对包含牵引列车和再生列车的牵引供电系统进行建模,通过对模型的解析分析振荡机理,提出振荡抑制策略,给出控制参数的解析计算方法,以抑制振荡现象。
1 再生制动系统建模与稳定性分析
1.1 系统工作模式
假设同一供电区间内有牵引车和再生车各一列,系统构成如图2所示。若牵引车功率小于再生车功率,则系统为低载再生系统。本文建模中忽略牵引供电网线路阻抗以及各部分损耗,并假设列车恒速运行。

图2 单供电区间再生制动系统构成
对图2进行简化,得到图3所示等效电路。其中,牵引变电所的不控整流被简化为二极管D1,电压源Us代表整流器输出端空载电压,D1与Us串联构成简化的变电所;Rf为直流侧等效电阻,Lf为滤波电感,is为供电线路电流;Cf1为再生车直流侧电容,电流源Iinv1代表再生车逆变器而输出电能,Uf1为再生车直流侧电容电压;Cf2为牵引车直流侧电容,电流源Iinv2代表牵引车逆变器而吸收电能,Uf2为牵引车直流侧电容电压。
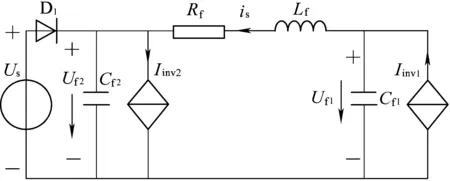
图3 系统简化等效电路
按照D1的开通状态和Uf1是否处于限流区可以将图3所示电路的工作模式分为4种,见表1。
表1 再生制动系统工作模式分类
本文将通过求解不同工作模式下的状态空间方程以分析系统稳定性。所研究列车以永磁同步电机为牵引电机。
1.2 系统状态方程与稳定性分析
上述单区间再生系统中,牵引逆变器功率可表示为
ηIinvUf=IdUd+IqUq
( 1 )
式中:η为逆变器能量转换效率;Iq、Id为电机交、直轴电流;Uq、Ud为电机交、直轴电压;Iinv为逆变器端电流;Uf为直流侧电容电压。
本文假设:
(1)逆变器能量转换效率为1。
(2)永磁同步电机采用id=0控制。
(3)速度为常数。
式( 1 )可以简化为
IinvUf=IqUq
( 2 )
按照以上假设,分析逆变器牵引工况、再生工况以及图3所示系统电压、电流特性。
1.2.1 逆变器牵引工况特性分析
永磁同步电动机稳态交轴电压方程为
Uq=ωeLdId+RmIq+ωeΨf
( 3 )
式中:ωe为电角速度;Ld为直轴电感;Rm为定子电阻;Ψf为永磁体磁链。在电机转速较高时可以忽略定子电阻压降RmIq,在id=0控制下Uq=ωeΨf。稳态分析中假设速度恒定,可以认为Uq恒定。由于逆变器的调制功能,牵引工况逆变器为牵引电机提供的功率一般情况下不受直流侧电容电压影响,本文分析时设列车牵引功率P2为常数。此时,牵引工况逆变器稳态特性表现为Iinv随Uf成反比变化。
( 4 )
1.2.2 逆变器再生工况特性分析
根据图1所示限流曲线,并结合式( 4 )可以得到再生工况逆变器的稳态特性为
( 5 )
式中:kp为限流曲线斜率;P1为再生功率。
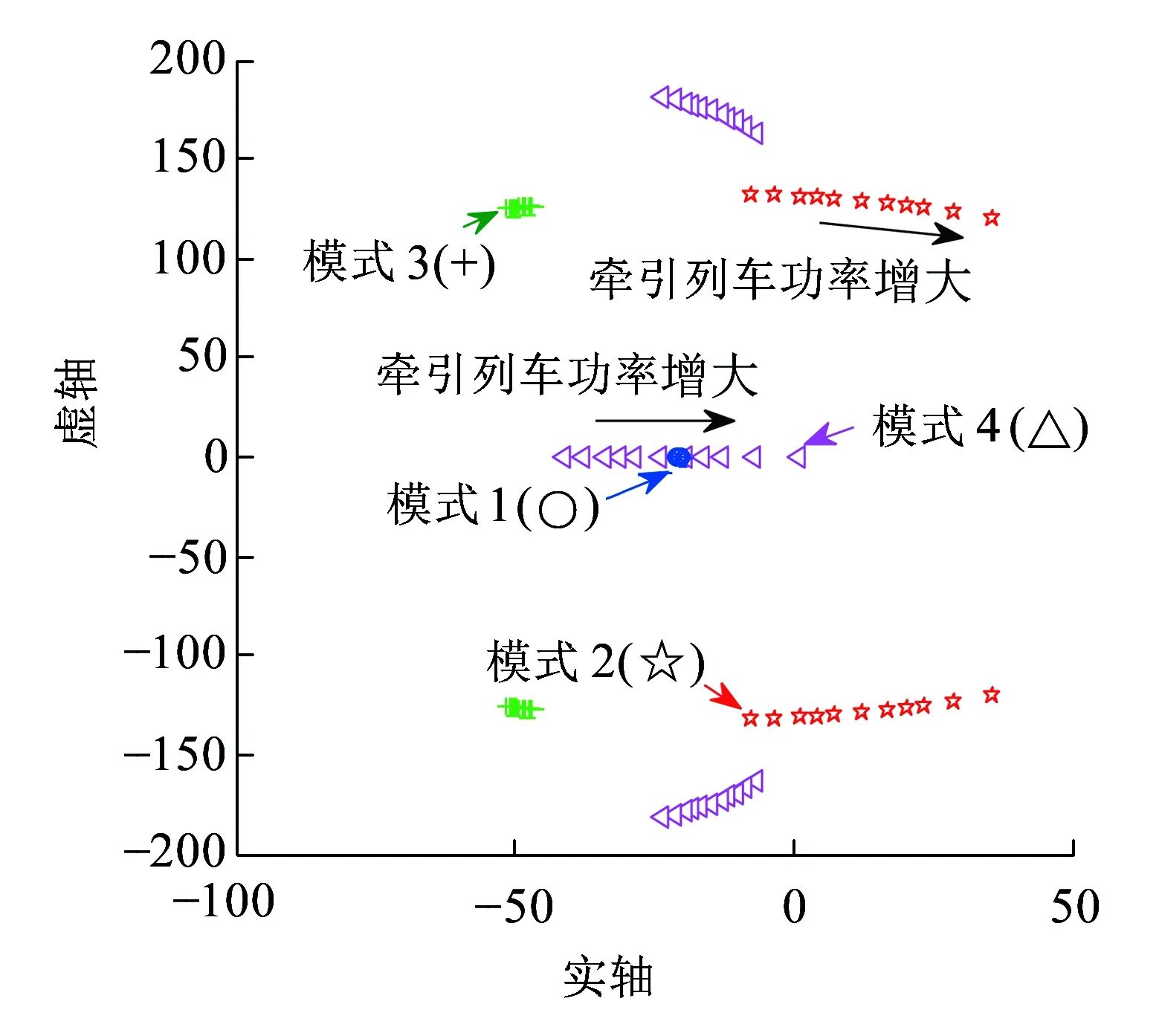
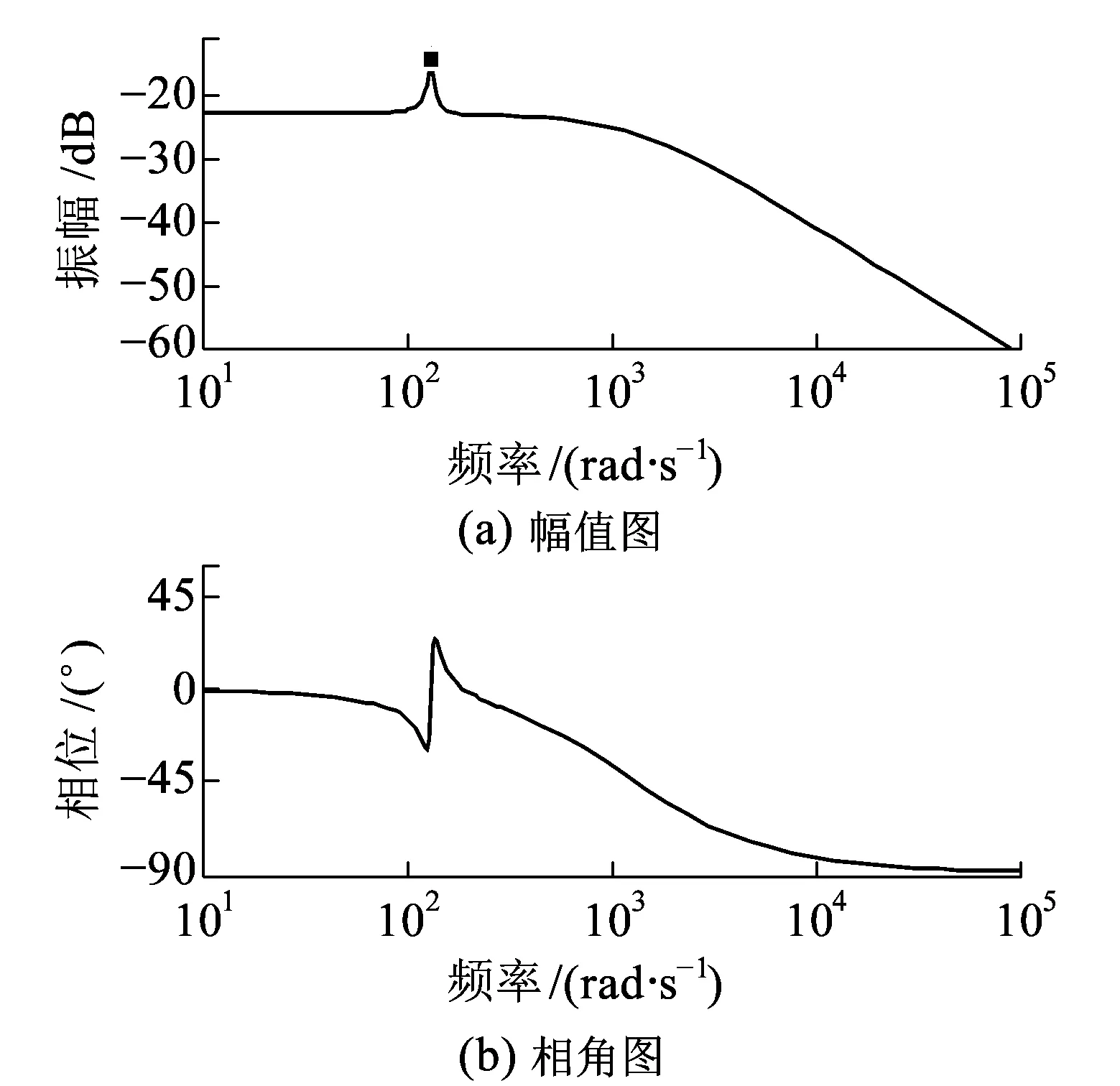
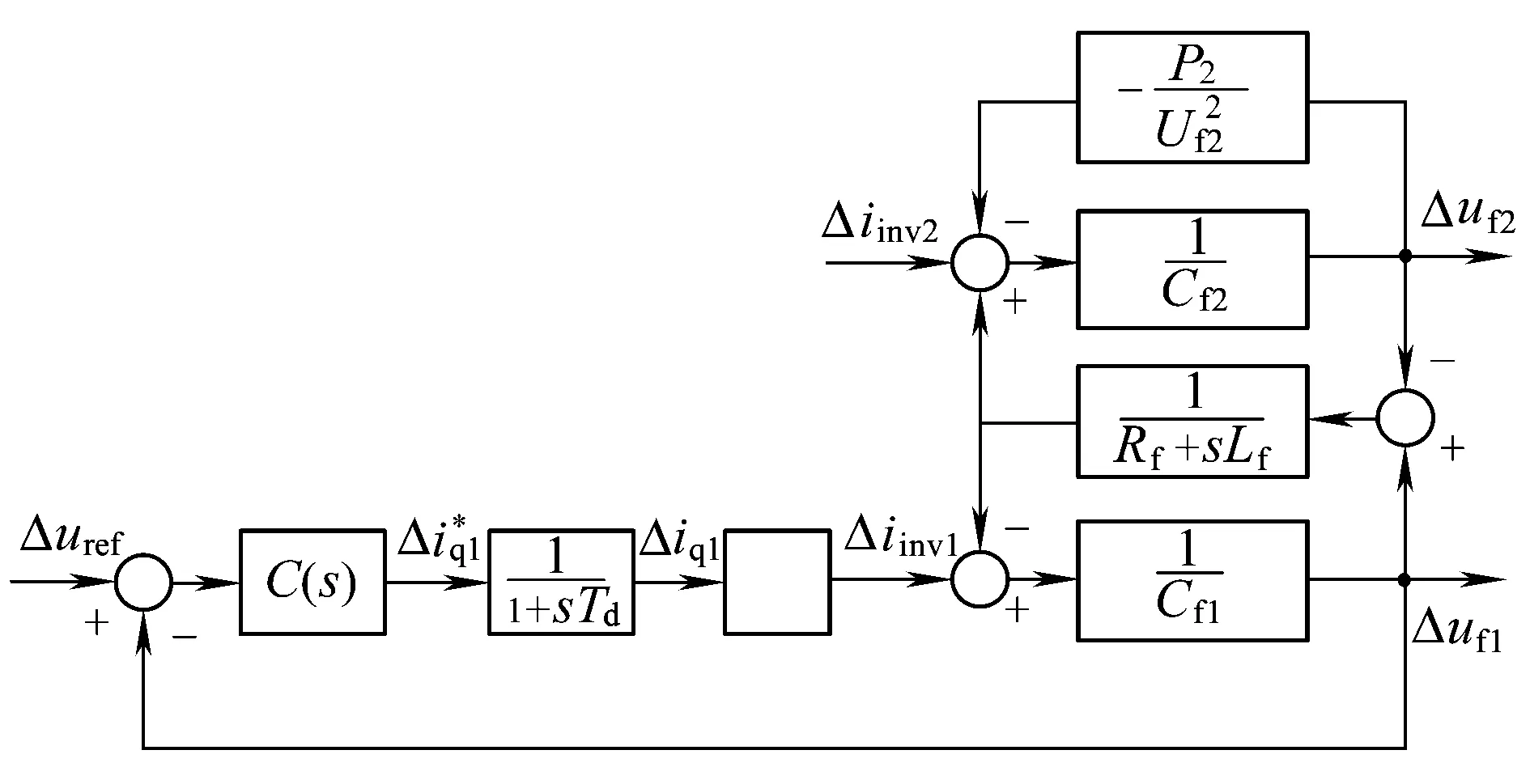
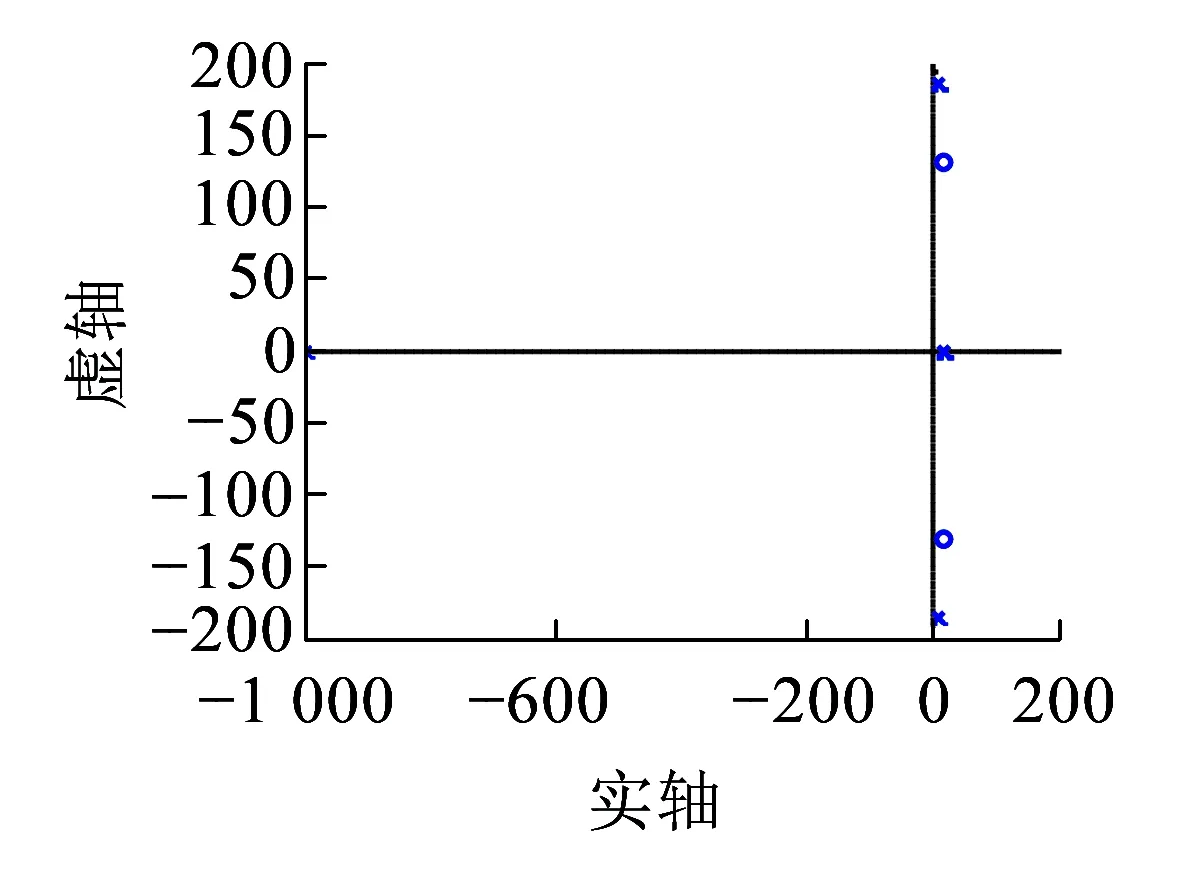
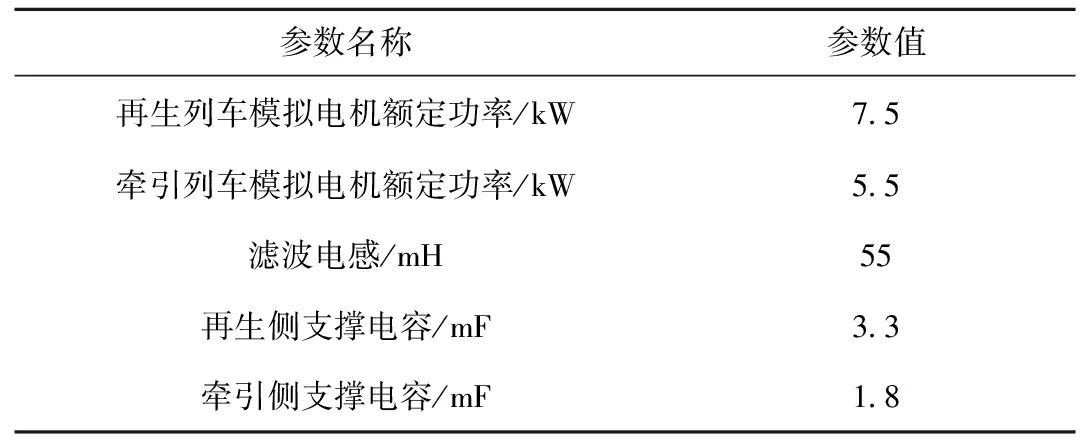
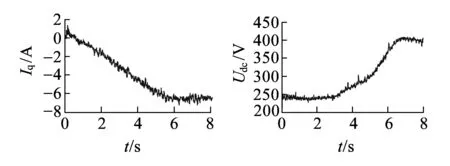
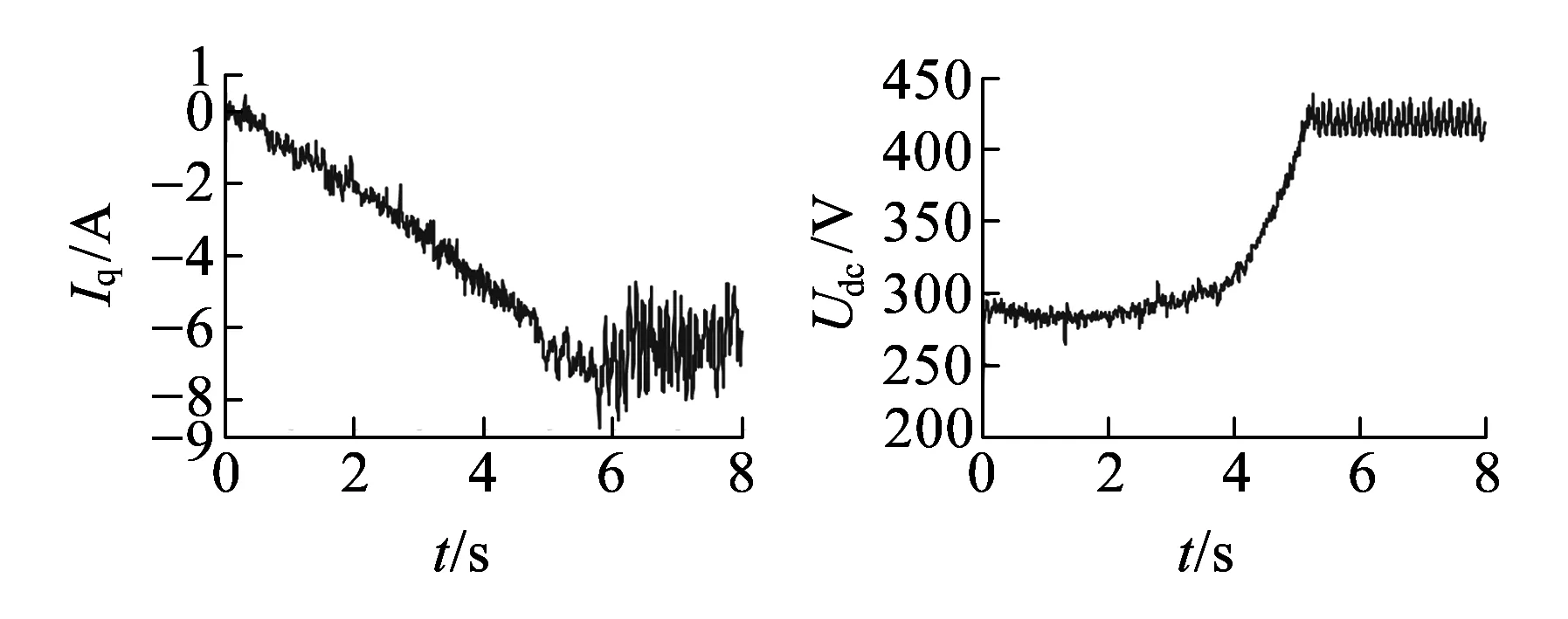
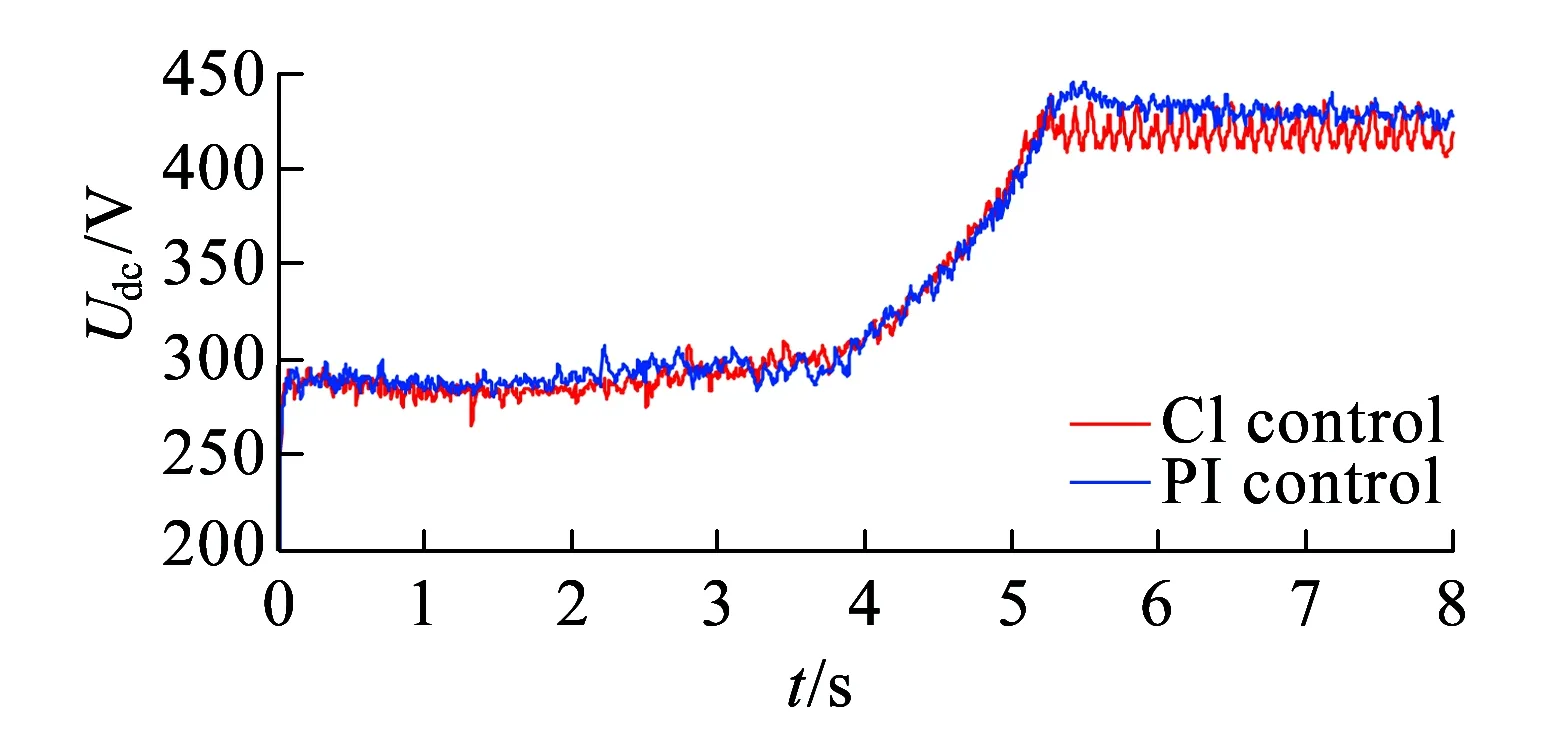
对比式( 4 )与式( 5 )可以发现,未进入限流区,即Uf 1.2.3 单供电区间再生制动系统特性分析 基于式( 4 )、式( 5 )所示牵引工况、再生工况列车逆变器特性,结合图3所示等效电路图,可以得到表1所示4种模式下的状态方程为 模式1: ( 6 ) 模式3: ( 7 ) 模式2: ( 8 ) 模式4: ( 9 ) 根据上述4种模式下的状态方程可以得到牵引车功率变化时各模式下的系统极点变化。设再生列车功率P1固定为3 MW,牵引车功率P2从2.9 MW开始减小到500 kW,系统参数见表2,各模式下靠近虚轴的极点变化轨迹如图4所示。 表2 再生制动系统仿真电路参数设定 图4 P2变化时的根轨迹 如图4所示,模式2和模式4下可能出现正实部极点。其中,模式2下只有当P2较小,极点的实部才是负数,系统在较大功率范围内失稳。低载再生制动工况下,牵引车功率小于再生车功率,模式4下网压快速上升,系统将进入模式1或者模式2。只需针对模式2进行分析,提升系统稳定性。 以再生车逆变器电流变化量Δiinv1为输入,再生车支撑电容电压变化量Δuf1为输出,不加限流控制时的系统框图如图5所示。 图6所示为加入限流曲线控制后的系统控制框图。Td为逆变器-电机系统闭环控制一次延时;γ为电机电流和逆变器电流变化量之比。 γ=Δiinv1/Δiq1=Uq1/Uf1 (10) 图5 再生系统开环框图 图6 限流曲线控制下的系统框图 求解图6所示系统闭环传递函数 (11) 其中, B5=-P2-kpγP2Rf 根据传递函数绘制系统Bode图,如图7所示,系统的共振频率为130 rad/s,约为20.69 Hz,与LfCf1谐振频率接近。 综上所述,在限流控制下系统会出现固定频率振荡,需要设计能够稳定运行的再生控制器。 低载再生系统中,再生车的逆变器输出功率P1大于牵引车逆变器输入功率P2,依据式( 4 )、式( 5 )所示列车牵引工况、再生工况逆变器特性,系统特性如图8所示。 图7 限流曲线控制下的系统Bode图 图8 系统稳态特性 图8中,实曲线为再生车特性曲线,虚曲线为牵引车特性曲线,两者交点为系统功率平衡点。Ulim (12) 根据式(12)可知,平衡点坐标受Uq1、P2影响,即当再生车速度、牵引车功率等系统参数改变时,该平衡点也将改变。实际系统中Uq1、P2等参数变化相对较慢,可以根据计算得到稳态平衡点坐标,在此平衡点附近设计稳定的基于线性近似的控制器。 从前文分析可知,在限流曲线控制下,系统工作在模式2时存在不稳定的情况。本文将图6所示限流曲线控制中的比例控制替换为PI控制器C(s)。基于前文建立的系统模型,可以得到加入PI控制器C(s)后的闭环传递函数框图,如图9所示。其中,Ulim 图9 振荡抑制框图 图9所示系统不包含C(s)的开环传递函数为 P(s)= (13) P(s)的零极点分布图如图10所示。 图10 P(s)的零极点分布图 根据图10所示零极点分布可知,系统传递函数的基本形式为 (14) (15) (16) 图11对比了Plow(s)、Phigh(s)和P(s)的Bode图。 图11 P(s),Plow(s),Phigh(s)Bode图对比 如图11所示,除反共振与共振频率附近频域外,Plow(s)能够反映出P(s)在低频域的特性,而Phigh(s)能够反映出P(s)在高频域的特性,因此P(s)可以用Plow(s)与Phigh(s)拟合,并以之作为设计控制器的依据。上述近似成立的原因在于模式2中Lf的低频域抗阻非常小,低频域下可以将Lf视为短路状态,而在高频域视为开路状态;低频域Cf1与Cf2并联,在高频域时只有Cf1。 从传递函数可以看出Plow(s)和Phigh(s)均由两个惯性环节串联而成,在低频段以非最小相位的惯性环节为主导,高频域以最小相位惯性环节为主导。中频域的P(s)也即反共振至共振附近的区域,其相位穿越-180°的线。此处共振增益变大,会对系统稳定性造成影响。根据串联综合校正法对开环函数进行校正,以期望得到-2-1-2型的开环对数幅频特性[11],来规范化和简单化系统特性并以该特性下所能取得的最佳特性来确定参数。 按照上述简化后的开环传递函数进行校正,可以得到Phigh(s)在对应形式下的PI控制器参数为 (17) 校正后的系统闭环传递函数为 (18) 如前文所述,牵引功率P2影响平衡点处的电压Uf0。因此,在校正后的闭环传递函数中,按照表2中的参数,改变P2进行仿真。图12是P2分别为0.5、1、1.5、2、2.5 MW时绘制的系统Bode图。 图12 Gc(s)Bode图 如图12所示,校正后的系统增益在共振频率附近也是控制在一定范围内的,系统特性在高频域同样不存在峰值,从而能够稳定运行。此外,控制器设计时并没有使用作为负载的牵引列车的参数,即本文所提再生系统稳定控制结果不受牵引列车参数变化的影响。共振频率与设计不同时,也不影响再生系统稳定控制结果。 综上所述,本文提出的PI控制器以及控制参数设计方法能够提升系统稳定性。 为了模拟前文所述的单区间再生系统,本文实验采用两个电机控制平台分别模拟一个供电区间内的再生列车和牵引列车。 实验平台一:再生列车由对拖永磁同步电机平台进行模拟,其控制器为DSP28335。平台实物图如图13所示。 实验平台二:牵引列车以带测功机为负载的永磁同步电机模拟,其依托Myway平台进行控制。平台实物如图14所示,通过测功机控制器可以对电机负载功率进行控制。 图13 再生列车模拟平台 图14 牵引列车模拟平台 再生车模拟平台牵引侧变流器的直流侧与牵引车模拟平台的变流器直流侧进行并联,以并联的直流侧模拟直流供电网,并在两者的直流侧之间串入滤波电感Lf。实验中,再生列车模拟平台以固定转速运行,转速由负载侧电机控制,负载侧电机输出转矩为正,为平台提供能量;再生列车模拟平台牵引侧电机电流闭环控制,交轴电流指令为负,输出转矩为负,进行再生制动。再生制动能量通过并联的变流器直流侧提供给牵引列车模拟平台。牵引列车模拟平台的电机消耗一定功率,运行在牵引工况。实验平台参数见表3。 表3 实验平台关键参数 考虑实验平台电压等级,实验时选择限流控制的起始电压Ulim为400 V,限流曲线电压最大值Umax为450 V,牵引列车模拟平台功率P2取300、600和900 W,实验结果分别对应图15中的(a)、(b)、(c)图。P2为300 W和600 W时,再生制动模拟电机能够稳定运行。P2=900 W,模拟的直流网压Udc和再生制动模拟电机转矩电流iq出现振荡,振荡发生在恒功率再生制动时。电流振荡幅值约为±1.5 A,电压振荡幅值约为±10 V。 (a)P2=300 W (b)P2=600 W (c)P2=900 W图15 限流曲线控制下的Udc和Iq波形 图15(c)中振荡频率约为9 Hz,根据电容电感参数可以得到系统的共振频率为11.8 Hz。实际振荡频率和理论计算较为接近。 如前文所述,P2=900 W时,系统出现振荡而不稳定,因此在P2=900 W条件下开展振荡抑制实验。选取直流侧电压闭环控制起始点Uref=430 V。振荡抑制效果如图16所示。图16中,CL control代表限流曲线控制,PI control代表基于PI控制器的电压闭环控制。 (a)Iq波形 (b)Udc波形图16 Iq和Udc波形对比图 根据图16所示结果,采用基于PI控制器的电压闭环控制时,系统在P2=900 W时也变得稳定,而且Udc与设定的电压指令值Uref=430 V基本一致。实验验证了本文系统稳定控制方法的有效性。 本文针对城轨列车再生制动时,限流曲线控制下直流网压、电机电流振荡现象进行建模分析与稳定控制。 按照系统限流的关键电气量进行工作模式分类。展开系统功率特性分析,建立小信号模型,判断各工作模式的稳定性。 根据所建立的再生制动模型进行解析,在功率平衡点附近进行线性化处理,得到系统小信号模型下的传递函数。提出利用PI控制器进行稳定控制,并给出关键控制参数的设计方法,结合系统Bode图验证了振荡抑制策略下系统的稳定性。 抑制策略实验模拟了单区间再生系统,并结合理论分析设计了实验方案。通过改变牵引列车模拟平台功率,再现了再生制动振荡现象。根据振荡抑制实验结果,采用本文提出的基于PI控制器的电压闭环控制与相应的参数设计方案能够达到抑制振荡的效果,保证系统稳定性。 参考文献: [1]WANG B,YANG Z P,LIN F,et al.An Improved Genetic Algorithm for Optimal Stationary Energy Storage System Locating and Sizing[J].Energies,2014,7:6434-6458. [2]贾兆欣.城轨列车再生制动节能与振荡抑制研究[D].北京:北京交通大学,2016. [3]YUSIVAR F,UCHIDA K,KIHARA T,et al.An Anti Oscillation Strategy for the Regenerative Braking Control of Permanent Magnet Synchronous Motor with Insufficient Load Power Consumption[C]//The 27th Annual Conference of the IEEE Industrial Electronics Society.New York:IEEE,2001:1457-1462. [4]SAITO T,KONDO K,KOSEKI T.An Analytical Design Method for a Regenerative Braking Control System for DC-electrified Railway Systems under Light Load Conditions[J].IEEJ Transactions on Industry Applications,2012,132(2):268-277. [5]ASANO J.A Damping Control Method to Enhance Regenerative Brake Power under Light Consumption Load Conditions.Industrial Electronics Society[C]//IECON 2013-39th Annual Conference of the IEEE.New York:IEEE,2013:4516-4521. [6]SUDHOFF S D,CORZINE K A,GLOVER S F,et al.DC Link Stabilized Field Oriented Control of Electric Propulsion Systems[J].IEEE Transactions on Energy Conversion,1998,13(1):15-22. [7]林文立,刘志刚,孙大南,等.地铁牵引系统的稳定性提升控制[J].电机与控制学报,2012,16(2):56-61. LIN Wenli,LIU Zhigang,SUN Danan,et al.Stability Improvement Control for Metro Traction Drive System[J].Electric Machines and Control,2012,16(2):56-61. [8]孙大南,刘志刚,林文立,等.地铁牵引变流器直流侧振荡抑制策略研究[J].铁道学报,2011,33(8):52-57. SUN Danan,LIU Zhigang,LIN Wenli,et al.Research on DC-Link Oscillation Suppression Strategy in Metro Traction Converter[J].Journal of the China Railway Society,2011,33(8):52-57. [9]赵雷廷,刁利军,董侃,等.地铁牵引变流器-电机系统稳定性控制[J].电工技术学报,2013,28(6):101-107. ZHAO Leiting,DIAO Lijun,DONG Kan,et al.Stabilization Control for Metro Traction Converter-Motor System[J].Transactions of China Electrotechnical Society,2013,28(6):101-107. [10]方晓春,钟志宏,杨中平,等.阻抗不匹配引起的逆变器-IPMSM系统直流侧振荡抑制方法对比[J].电工技术学报,2017,32(12):50-58. FANG Xiaochun,ZHONG Zhihong,YANG Zhongping,et al.Comparative Research on DC Side Oscillation Suooression Methods for Inverter-IPMSM System Caused by Impedance Mismatch [J].Transactions of China Electrotechnical Society,2017,32(12):50-58. [11]胡寿松,自动控制理论[M].5版.北京:科学出版社,2007:265-270.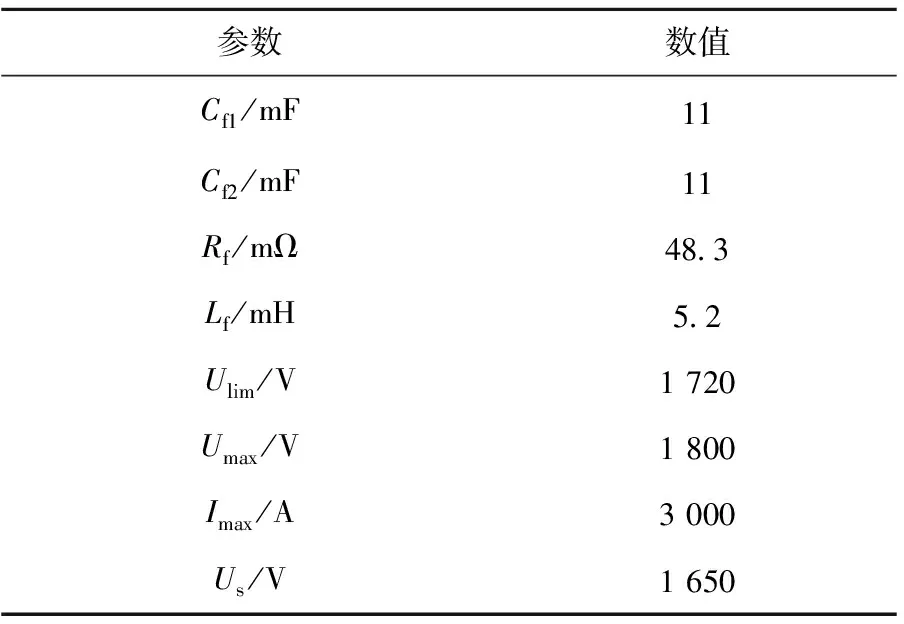
2 振荡分析与抑制策略
2.1 模式2振荡分析


2.2 振荡抑制策略


3 抑制策略实验验证




4 结束语
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:20小哥白尼(趣味科学)(2021年4期)2021-07-28 02:23:50云南画报(2021年4期)2021-07-22 06:17:10能源工程(2020年6期)2021-01-26 00:55:22小学生学习指导(低年级)(2019年6期)2019-07-22 03:32:48通信电源技术(2018年3期)2018-06-26 06:33:32上海公路(2017年1期)2017-07-21 13:38:33中国科技信息(2015年18期)2015-11-10 03:55:34电源技术(2015年11期)2015-08-22 08:50:36电测与仪表(2015年10期)2015-04-09 11:48:02
